 2023年新版大学物理仿真实验报告碰撞与动量守恒
2023年新版大学物理仿真实验报告碰撞与动量守恒

《2023年新版大学物理仿真实验报告碰撞与动量守恒》由会员分享,可在线阅读,更多相关《2023年新版大学物理仿真实验报告碰撞与动量守恒(6页珍藏版)》请在装配图网上搜索。
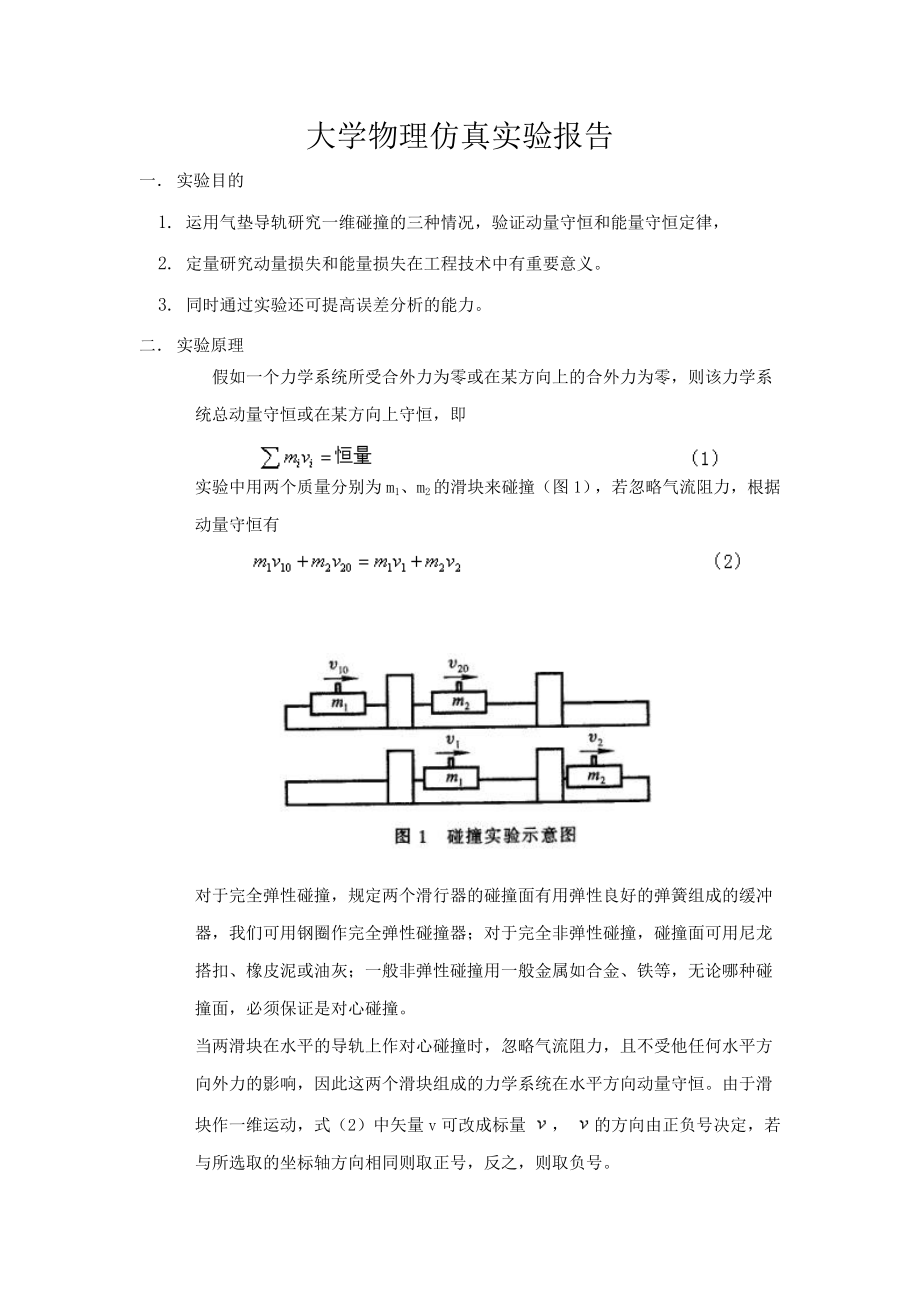
1、大学物理仿真实验报告一 实验目的1. 运用气垫导轨研究一维碰撞的三种情况,验证动量守恒和能量守恒定律,2. 定量研究动量损失和能量损失在工程技术中有重要意义。3. 同时通过实验还可提高误差分析的能力。二 实验原理 假如一个力学系统所受合外力为零或在某方向上的合外力为零,则该力学系统总动量守恒或在某方向上守恒,即实验中用两个质量分别为m1、m2的滑块来碰撞(图1),若忽略气流阻力,根据动量守恒有对于完全弹性碰撞,规定两个滑行器的碰撞面有用弹性良好的弹簧组成的缓冲器,我们可用钢圈作完全弹性碰撞器;对于完全非弹性碰撞,碰撞面可用尼龙搭扣、橡皮泥或油灰;一般非弹性碰撞用一般金属如合金、铁等,无论哪种碰
2、撞面,必须保证是对心碰撞。当两滑块在水平的导轨上作对心碰撞时,忽略气流阻力,且不受他任何水平方向外力的影响,因此这两个滑块组成的力学系统在水平方向动量守恒。由于滑块作一维运动,式(2)中矢量v可改成标量,的方向由正负号决定,若与所选取的坐标轴方向相同则取正号,反之,则取负号。1. 完全弹性碰撞完全弹性碰撞的标志是碰撞前后动量守恒,动能也守恒,即由(3)、(4)两式可解得碰撞后的速度为假如v20=0,则有动量损失率为能量损失率为理论上,动量损失和能量损失都为零,但在实验中,由于空气阻力和气垫导轨自身的因素,不也许完全为零,但在一定误差范围内可认为是守恒的。2. 完全非弹性碰撞碰撞后,二滑块粘在一
3、起以10同一速度运动,即为完全非弹性碰撞。在完全非弹性碰撞中,系统动量守恒,动能不守恒。在实验中,让v20=0,则有动量损失率动能损失率3. 一般非弹性碰撞一般情况下,碰撞后,一部分机械能将转变为其他形式的能量,机械能守恒在此情况已不合用。牛顿总结实验结果并提出碰撞定律:碰撞后两物体的分离速度与碰撞前两物体的接近速度成正比,比值称为恢复系数,即恢复系数e由碰撞物体的质料决定。E值由实验测定,一般情况下0em2,用物理天平称m1、m2的质量(涉及挡光片)。将两滑块分别装上弹簧钢圈,滑块m2置于两光电门之间(两光电门距离不可太远),使其静止,用m1碰m2,分别记下m1通过第一个光电门的时间t10和
4、通过第二个光电门的时间t1,以及m2通过第二个光电门的时间t2,反复五次,记录所测数据,数据表格自拟,计算(2) 分别在两滑块上换上尼龙搭扣,反复上述测量和计算。(3) 分别在两滑块上换上金属碰撞器,反复上述测量和计算。五 数据记录与解决1. 完全弹性碰撞2. 一般非弹性碰撞 3.完全非弹性碰撞六.实验结论 1. 完全弹性碰撞动量守恒,机械能守恒,恢复系数为1; 2. 一般弹性碰撞动量守恒,机械能不守恒,恢复系数小于; 3. 完全非弹性碰撞动量守恒,机械能不守恒,恢复系数为0;七思考题1. 碰撞前后系统总动量不相等,试分析其因素。答:粘滞阻力,阻尼系数大小,系统恢复速度,气流速度,系统负载大小,都会影响实验结果。2. 恢复系数e的大小取决于哪些因素?答:碰撞物体的材料,系统环境等。3. 你还能想出验证机械能守恒的其他方法吗?答:通过研究自由落体运动,单摆运动等方法可以验证。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
