 轨距尺的智能化与创新
轨距尺的智能化与创新

《轨距尺的智能化与创新》由会员分享,可在线阅读,更多相关《轨距尺的智能化与创新(8页珍藏版)》请在装配图网上搜索。
1、精品范文模板 可修改删除撰写人:_日 期:_轨距尺的智能化与创新邵长胜 赵要武 张卓欣(北京铁路局天津工务段,天津300010)摘要:智能型轨距尺采用高精度直线位移传感器和倾角传感器来对轨距和水平进行测量,与其他数显轨距尺不同的是活动测头采用滚动测量技术,能连续不间断地采集数据并自动判断、锁定轨距最小值,使轨距测量更具科学性。通过本项创新不但提高了检测精度,而且也解决了活动测头的磨损问题,是轨距尺结构方面的一项创新,实现了智能化,达到了部颁0级轨距尺的规程要求,满足了高速铁路轨道线路的检测需要。关键词:轨距尺,智能化,创新,测量精度1、引言随着铁路列车的提速和高速列车的开行,对线路设备不论是维
2、修质量还是设备检查精度都提出了更高的标准。特别是对轨道几何尺寸测量的主要量具轨距尺提出了“分级管理”的要求,以满足高速列车开行的需要。然而,目前所使用的轨距尺均为刻度显示,在日常使用中由于受其结构和人为主观判断等因素影响,导致测量数值精度低、误差大,已无法满足当前高速铁路发展的需要。对此,铁道部于2008年重新修订了TB/T19242008标准轨距铁路轨距尺和中华人民共和国国家计量检定规程JJG219-2008铁路轨距尺检定规程。对轨距尺的生产和检定提出了新的标准和要求。同时,铁道部还要求对160KM/h以上区段尽快普及数字式的新型轨距尺。鉴于上述情况,近几年国内有关轨距尺生产厂家投入了大量的
3、资金开发研制新型数显式轨距尺。通过几年的努力,已有几种数显轨距尺面市进行试用,但只是处于试验和改进阶段。这些数显轨距尺从技术上和结构上大致雷同,只是在测量数字显示上采用了高精度的传感器,在提高检测精度上做了改进,但从结构和测量方法方面还是延用刻度式滑动测量方法,仍存在着活动测头磨耗大、人为读数找点误差大、检定过程繁琐等问题。所以,需要对轨距尺进行智能化的创新。2、智能轨距尺的基本构造及独特设计2.1结构设计智能轨距尺由机械轨距尺基础件、倾斜角传感器、位移传感器、数据微处理器及OLED显示装置电池盒四部分构成。其中,电池盒设计在提手握手内,给传感器和位移传动导向机构贡献出了宝贵的空间,使得提手可
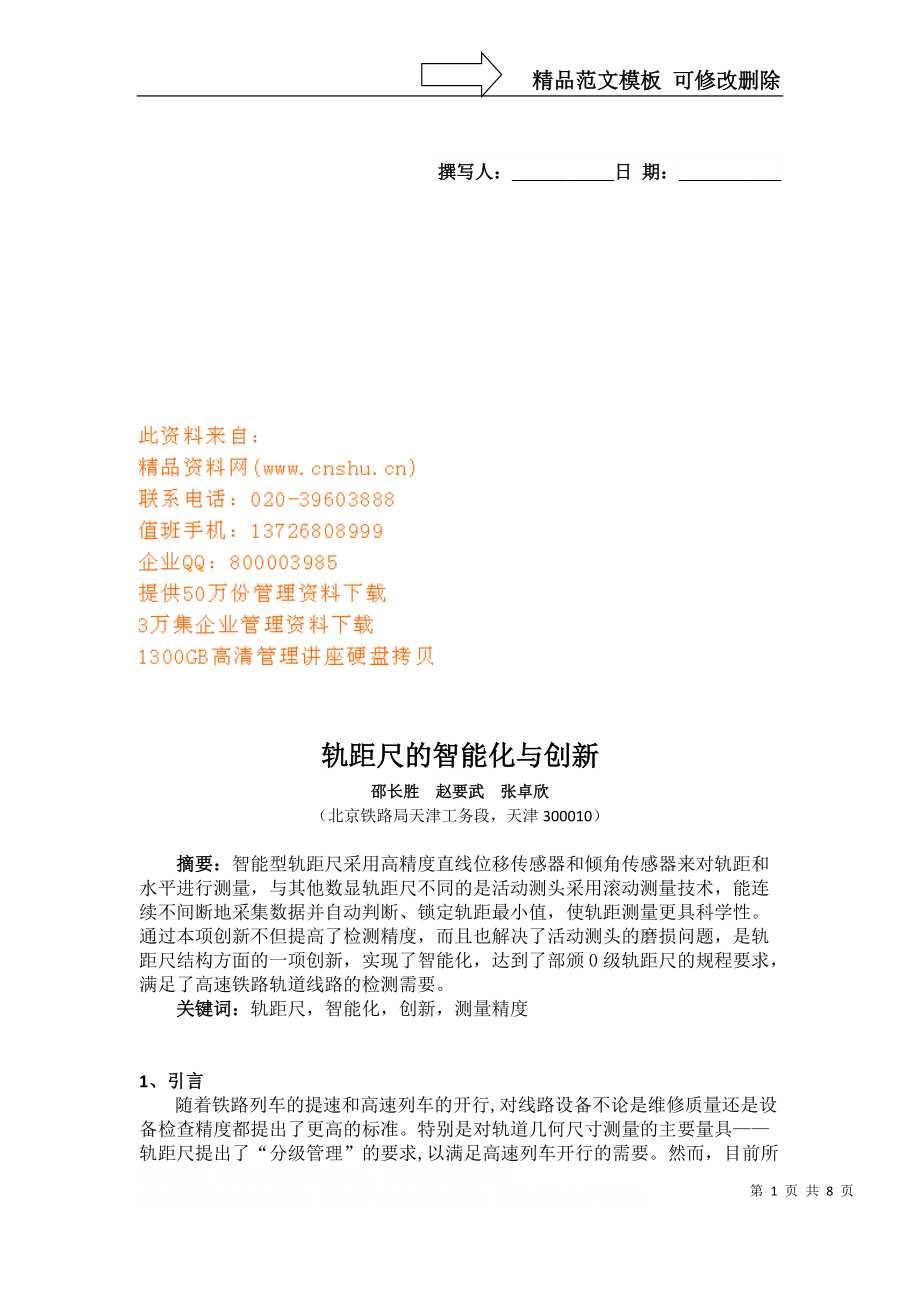
4、以从容的安放在整尺的重心部位,电子显示开关安放在提手上,便于现场操作,整尺结构简洁、操作方便、方便携带。智能轨距尺主要结构示意(见图1):图11、活动测头 2、活动端搭轨铁 3、活动端搭轨铁座 4、位移传感器连接块 5、位移传感器 6、数据微处理器及OLED显示盒(含倾斜角传感器) 7、提手(电池盒) 8、锂离子电池 9、扳手 10、固定端搭轨铁座 11、固定端搭轨铁 12、固定测头 13、位移传动导向机构2.2滚动测头设计该设计也是本装置的一个创新点,与其他数显轨距尺不同的是该轨距尺的活动测头采用滚动测量技术,能连续不间断地采集数据并自动判断、锁定轨距最小值,使轨距测量更具科学性。通过本项技
5、术不但提高了检测精度,而且也解决了活动测头的磨损问题,是轨距尺结构方面的一项创新,降低了活动测头的机械磨耗,并且完成了自动锁定轨距的目的,提高了检测精度和速度,方便了现场施工人员检测(见图2、3)。图2 滚动侧头图3 滚动测量示意 3、工作原理智能轨距尺主要是为了满足高速铁路线路的检测、维修而设计的,采用了高精度的倾斜角传感器、位移传感器和高性能微处理器以及智能软件,可以测量铁路线路的轨距、水平(超高)和道岔的查照间隔、护背距离等参数。在设计制造中强化了技术指标、使用环境、电池和功耗,以及操作方便性。倾角传感器采用微电子加工技术(Micro electronic mechanics syste
6、ms 缩写MEMS),利用微机械硅电容与集成电路技术,实现分辨率小于0.007%,非线性度小于0.015%的高灵敏度倾角传感器。敏感元件与处理电路集成在一个封装的电路中,电路还包含两个微处理器(Micro-computer),一个用于处理驱动满足规程规定使用温度要求的OLED显示,另一个用于处理倾斜角传感器和位移传感器信号,温度补偿、电源管理、电子轨距尺多种智能功能。倾角传感器与显示系统整体具有:高稳定性,高分辨率,低噪声;内置温度传感器(数字SPI输出);温度补偿与线性度补差;超强的纠错能力与保护措施;数位自测,奇偶校验和电源管理与自动关断功能。3.1轨距测量原理通过拉动扳手带动导杆做长度方
7、向的移动,使得连接在导杆前端的活动测头及其联接的位移传感器拉杆与固定在尺身上的位移传感器外壳产生相对运动,位移传感器给出对应的电信号,由此实现将轨距尺滑动测头与固定测头之间所对应的轨距测量值的电检测。位移传感器的信息传输给数据微处理器,通过电子显示面版切换按键,实现轨距、查照、护背等不同测量需求。微处理器内置温度传感器实时将当前温度传输给数据微处理器,数据微处理器将接收到的各种信息经线性度修正与温度补偿运算后将当前的轨距信息显示在OLED液晶屏上,从而达到测量轨距的目的。温度补偿程序的作用是:由于尺身为铝合金材质,其线胀系数与轨道上影响轨距最直接的轨枕的线胀系数相差很大,这样就会在不同温度下测
8、量出的轨距产生很大误差,为了消除因温度而产生的误差,特设置温度传感器实时监控温度的变化,并将其传输给数据微处理器,数据微处理器根据当前的温度将位移传感器传来的轨距信息进行修正,以保证轨距尺在不同温度下测出轨距的准确性。轨距测量采用量程100mm的高耐磨长寿命(大于500万次)的直线位移传感器,其线性度优于0.1,包括机械系统误差全行程误差0.2mm。测量实际轨距的变化部分(和标准值比,如1435mm),最终结果标准值变化值。根据实际情况,在143513911348之间进行量程变换。智能轨距测量电路框图如图4所示:图4 智能超高测量电路框图轨距系统采用intel8031单片机,程序存储在2764
9、中,临时数据存储在6264中,并行接口及驱动电路负责控制液晶显示屏显示数据,接受按钮进行调节和预制。电源采用直流7.4V供电。单片机部分稳压出一个直流5V。74ls373负责地址锁存,74ls138负责地址译码,并为其他所有需要控制的部件提供片选信号。3.2超高(水平)测量原理超高(水平)测量采用高分辨率、高精度倾斜角传感器及数据微处理器组成,量程8,其分辨率:0.007,全量程测量误差0.008。超高(水平)测量利用正弦函数计算,原理如图所示: 两股钢轨间的超高实际上就是两股钢轨顶面形成的平面与水平面夹角A所对应的直角边的高度,即超高值=1505sinAh-超高(水平);q-倾斜角智能超高测
10、量电路框图如图5所示:图5 智能超高测量电路框图水平系统采用intel8031单片机,程序存储在2764中,临时数据存储在6264中,并行接口及驱动电路负责控制显示屏显示数据,接受按钮进行调节和预制。电源采用直流7.4V供电。单片机部分稳压出一个直流5V。74ls373负责地址锁存,74ls138负责地址译码,并为其他所有需要控制的部件提供片选信号。3.3数据采集与处理采用高分辨率、高精度模数转换器和高性能微处理器采集和处理数据,同时采用差动比例测量和软件修正方法实现测量数据的温度修正。智能轨距尺电子测量程序由下列模块构成:初始化程序;数据采集程序(倾角、位移、温度);数字滤波程序;温度计算程
11、序;温度补偿计算程序;线性校正程序;超高计算程序;超高显示程序;按键功能程序;参数存储程序;多个运算子程序。4、测量范围、技术指标4.1测量范围;显示分辨力标准轨距143535mm;查照间隔139110mm;护背距离134810mm;显示分辨0.01mm超高:对应检定器 185mm;显示分辨0.01mm温度:-49C99C,显示分辨1C4.2测量误差轨距:全量程0.2mm;超高:水平零位0.15mm;全量程误差0.3mm;调头累计误差0.3mm;主要检测项目的测量范围和准确度如下:- 检测项目 测量范围 检测精度 显示分辨轨 距 14101470 mm 0.25mm 0.01mm查照间隔 13
12、811401 mm 0.30mm 0.01mm护背距离 13381358 mm 0.30mm 0.01mm水 平 0.15mm 0.01mm超 高 185mm 0.3mm 0.01mm超高调头 0.3mm -4.3电源性能电源采用两节大容量锂离子充电电池,可在额定电压的-15%+25%间正常工作。在0环境下,可连续工作不少于50小时,欠电报警后可连续工作不少于8小时。5、适用环境及技术指标确定依据温度环境:由元器件温度指标和环境温度试验确定。利用单片机进行给定温度段的智能补偿处理。通过环境温度试验,可在-30C+55C温度下工作。抗震能力:500mm高处自由跌落后能正常工作。湿度环境:可在+4
13、0C,93%RH湿度下工作,传感器和仪表的电子元器件全部密封(胶封、塑封),关键部位强化密封。亮暗环境:高对比度发光显示,可在白天、夜间以及隧道中使用。5.1位移传感器量程:100 mm电阻:5 KW非线性误差:0.1输出范围:05V使用温度:-60+150接口电路采用比例测量方案,消除基准电压和位移电阻的温度漂移对测量结果的影响。尺身材料热胀冷缩引起轨距测量数值的变化,由软件计算进行修正。5.2倾角传感器测量范围:8频率响应:8Hz零位误差:0.005(校准以后)灵敏度:280mV/灵敏度误差: 0.05非线性误差: 0.1(校准以后)零位温度系数: 0.002/C灵敏度温度系数: 0.01
14、3%/C分辨率:0.0013长期稳定性: 0.004采用差动测量和软件修正方法实现测量数据的温度修正。5.3位移(轨距)测量的不确定度位移(轨距)测量部分由位移传感器、基准电压源和14位A/D转换器组成。基准电压源的温度漂移已由比例测量原理消除。位移传感器的非线性误差 0.1,绝对误差1000.10.1mm 14位A/D转换器的积分非线性误差2LSB,相对值2/2140.012,绝对值1000.0120.012 mm尺身材料热胀冷缩引起轨距测量误差 0.01,绝对误差15050.010.15mm 所以,位移(轨距)测量的总不确定度为 mm5.4水平(超高)测量的不确定度水平(超高)测量部分由倾
15、角传感器、差分放大器、16位A/D转换器和基准电压源组成。后三个单元的温度漂移由测量过程中的自动校准措施消除。倾角传感器的零位误差0.005,相当于超高误差1505sin0.0050.13 mm倾角传感器的非线性误差 0.1,绝对误差1850.10.185mm差分放大器增益误差20ppm,绝对误差20/1061850.0037 mm差分放大器和16位A/D转换器的积分非线性误差15ppm,相对值215/106 2160.5LSB,或215/1060.003,绝对值1850.0030.0055 mm 所以,水平(超高)测量的总不确定度为 mm6、应用效果样尺已在提速线路的工务段上推广试用,用户反
16、映效果良好,同其他轨距尺相比在各方面性能上都有较大突破。高精度位移传感器、倾斜角传感器和滚动轴承技术的引进,实现了轨距、水平的数字智能化的测量。检定人员只需对91、48、1435、水平0位四点进行标定即可完成一次检定工作,提高了工作效率。达到了测量精度高、速度快、范围广的目的,同时降低了机械磨耗,减小了维修投入。图6 现场使用照片该轨距尺经铁道部标准计量所检验,满足中华人民共和国国家计量检定规程JJG219-2008铁路轨距尺新规程的要求,满足部颁0级轨距尺检定规程标准的要求,能对160km/h的高速线路实施检测。通过成果的应用,改变了过去传统的刻度式轨距尺的测量方式,对确保和提高线路、道岔维
17、修养护质量具有重要作用,特别是对线路、道岔动态下的检测维修能提供准确的科学依据,能有效地消灭轨道几何尺寸不良等病害,提高了旅客的舒适度,满足了线路、道岔维修质量实现“0”误差的要求,防止了重复作业和无效劳动。另外,采用的OLED显示屏显示清晰,而且具有背光和延时自动关机的功能,尤其是在高低温、湿热、雨淋等环境工作中经得住考验,适用于全天候作业。7、结束语该智能轨距尺是对传统铁道轨距尺的一次革命性的突破,通过4点校准即可完成一次测量,让操作者快而准的找到轨距的最小值和水平(超高)数值。活动测头滚动摩擦取代滑动摩擦,提高了测量精度,降低了机械磨损。其符合了我国铁路跨越式的发展要求,达到了方便、精确
18、、美观、耐用的目的,使工务系统的线路维护工人从传统的检测方式转化到集电子化、数字化、智能化的高科技检测技术中来。我国高速铁路正在快速崛起,按现在的发展步伐,到2012年底,我国高速铁路里程将达到1.3万公里,这将超过世界其他国家高速铁路里程的总和。为满足这一趋势,该智能轨距尺在测量精度及制造维修成本上都体现出了特有的技术优势,既满足了铁道部对工务设备提出的新标准,又能迅速在高速铁路中普及,符合了当前发展趋势,具有较高的推广价值。作者联系方式:北京铁路局天津工务段 邵长胜 工程师 电话:0317-7942865 路电:02342865第 8 页 共 8 页免责声明:图文来源于网络搜集,版权归原作者所以若侵犯了您的合法权益,请作者与本上传人联系,我们将及时更正删除。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
