 线性系统校正方法85
线性系统校正方法85

《线性系统校正方法85》由会员分享,可在线阅读,更多相关《线性系统校正方法85(111页珍藏版)》请在装配图网上搜索。
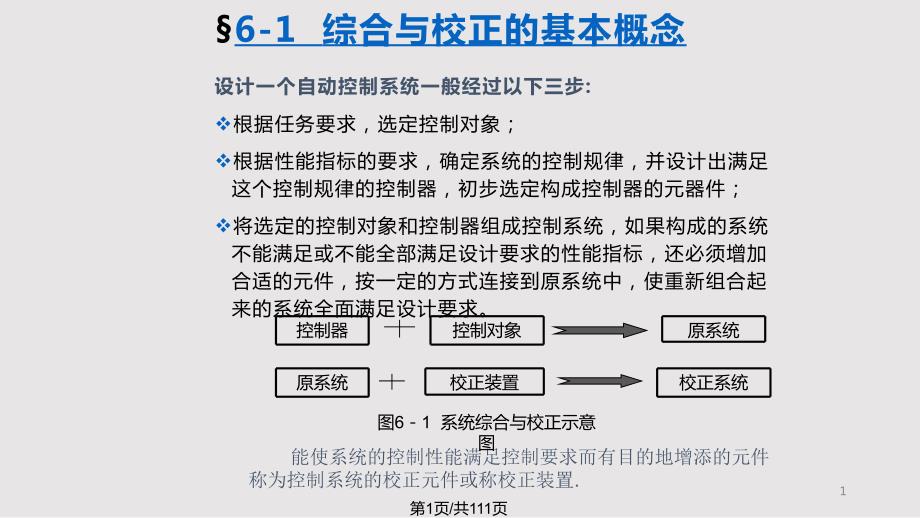
1、16-1 综合与校正的基本概念设计一个自动控制系统一般经过以下三步:v根据任务要求,选定控制对象;v根据性能指标的要求,确定系统的控制规律,并设计出满足这个控制规律的控制器,初步选定构成控制器的元器件;v将选定的控制对象和控制器组成控制系统,如果构成的系统不能满足或不能全部满足设计要求的性能指标,还必须增加合适的元件,按一定的方式连接到原系统中,使重新组合起来的系统全面满足设计要求。原系统控制器控制对象校正系统原系统校正装置 能使系统的控制性能满足控制要求而有目的地增添的元件称为控制系统的校正元件或称校正装置.图61 系统综合与校正示意图第1页/共111页2必须指出,并非所有经过设计的系统都要
2、经过综合与校正这一步骤,对于控制精度和稳定性能都要求较高的系统,往往需要引入校正装置才能使原系统的性能得到充分的改善和补偿。反之,若原系统本身结构就简单而且控制规律与性能指标要求又不高,通过调整其控制器的放大系数就能使系统满足实际要求的性能指标。在控制工程实践中,综合与校正的方法应根据特定的性能指标来确定。一般情况下,若性能指标以稳态误差 、峰值时间 、最大超调量 、和过渡过程时间 、等时域性能指标给出时,应用根轨迹法进行综合与校正比较方便;如果性能指标是以相角裕度r幅值裕度 、相对谐振峰值 、谐振频率 和系统带宽 等频域性能指标给出时,应用频率特性法进行综合与校正更合适。第2页/共111页3
3、系统分析与校正的差别:系统分析的任务是根据已知的系统,求出系统的性能指标和分析这些性能指标与系统参数之间的关系,分析的结果具有唯一性。系统的综合与校正的任务是根据控制系统应具备的性能指标以及原系统在性能指标上的缺陷来确定校正装置(元件)的结构、参数和连接方式。从逻辑上讲,系统的综合与校正是系统分析的逆问题。同时,满足系统性能指标的校正装置的结构、参数和连接方式不是唯一的,需对系统各方面性能、成本、体积、重量以及可行性综合考虑,选出最佳方案.第3页/共111页46-2 常用校正装置及其特性 校正装置的连接方式:(1)串联校正(2)顺馈校正(3)反馈校正Gc(s):校正装置传递函数G(s):原系统
4、前向通道的传递函数H(s):原系统反馈通道的传递函数第4页/共111页5串联校正 串联校正的接入位置应视校正装置本身的物理特性和原系统的结构而定。一般情况下,对于体积小、重量轻、容量小的校正装置(电器装置居多),常加在系统信号容量不大的地方,即比较靠近输入信号的前向通道中。相反,对于体积、重量、容量较大的校正装置(如无源网络、机械、液压、气动装置等),常串接在容量较大的部位,即比较靠近输出信号的前向通道中。Gc(s)G(s)H(s)R(s)C(s)-62 串联校正第5页/共111页6顺馈校正 顺馈校正是将校正装置Gc(s)前向并接在原系统前向通道的一个或几个环节上。它比串联校正多一个连接点,即
5、需要一个信号取出点和一个信号加入点。R(s)Gc(s)G2(s)H(s)G1(s)C(s)-图63 顺馈校正第6页/共111页7反馈校正 反馈校正是将校正装置Gc(s)反向并接在原系统前向通道的一个或几个环节上,构成局部反馈回路。G1(s)G2(s)Gc(s)H(s)R(s)C(s)由于反馈校正装置的输入端信号取自于原系统的输出端或原系统前向通道中某个环节的输出端,信号功率一般都比较大,因此,在校正装置中不需要设置放大电路,有利于校正装置的简化。但由于输入信号功率比较大,校正装置的容量和体积相应要大一些。图64 反馈校正第7页/共111页8三种连接方式的合理变换 通过结构图的变换,一种连接方式
6、可以等效地转换成另一种连接方式,它们之间的等效性决定了系统的综合与校正的非唯一性。在工程应用中,究竟采用哪一种连接方式,这要视具体情况而定。一般来说,要考虑的因素有:原系统的物理结构,信号是否便于取出和加入,信号的性质,系统中各点功率的大小,可供选用的元件,还有设计者的经验和经济条件等。由于串联校正通常是由低能量向高能量部位传递信号。加上校正装置本身的能量损耗。必须进行能量补偿。因此,串联校正装置通常由有源网络或元件构成,即其中需要有放大元件。反馈校正是由高能量向低能量部位传递信号,校正装置本身不需要放大元件,因此需要的元件较少,结构比串联校正装置简单。由于上述原因,串联校正装置通常加在前向通
7、道中能量较低的部位上,而反馈校正则正好相反。从反馈控制的原理出发,反馈校正可以消除校正回路中元件参数的变化对系统性能的影响。因此,若原系统随着工作条件的变化,它的某些参数变化较大时,采用反馈校正效果会更好些。第8页/共111页9常用校正装置及其特性(1)超前校正网络(2)滞后校正网络(3)滞后-超前校正网络常用无源校正网络表(6-1)第9页/共111页10(1)超前校正网络网络的传递函数 G(S)=Z2/(Z1+Z2)=(1+TS)/(1+TS)(6-1)式中 T=R1R2C/(R1+R2)=(R1+R2)/R21R1R2C1图65无源超前网络UiUo-1复阻抗Z1=(1/R1+CS)=R1/
8、(1+R1CS)Z2=R2第10页/共111页11 由式(6-1)可看出,无源超前网络具有幅值衰减作用,衰减系数为1/。如果给超前无源网络串接一放大系数为的比例放大器,就可补偿幅值衰减作用。此时,超前网络传递函数可写成:G(S)=(1+TS)/(1+TS)(6-2)由上式可知,超前网络传递函数有一个极点p(-1/T)和一个零点Z(-1/T),它们在复平面上的分布如图6-6所示.m=z-p0,相位超前作用.-1/T-1/TspZj 0zp图6-6 超前网络零、极点在S平面上的分布第11页/共111页12 用S=j代入式(6-2)得到超前校正网络的频率特性 G(j)=(1+jT)/(1+jT)(6
9、-3)根据上式得到超前网络极坐标图。当值趋于无穷大时,单个超前网络的最大超前相角m=90度;当=1时超前相角m=0度,这时网络已经不再具有超前作用,它本质上是一个比例环节.超前网络的最大超前相角m与参数之间的关系如图67、6-8所示.图67 超前网络极坐标图Im(1+1)/2(1-1)/2123Rem1m 2m 3=001(6-4)第12页/共111页13图6-8 超前网络的-m曲线 当m 60度,急剧增大,网络增益衰减很快。1510159060300值过大会降低系统的信噪比m(度)第13页/共111页14无源超前网络(1+TS)/(1+TS)的Bode图(6-9)最大幅值增益是20lga(d
10、B),频率范围1/T;由相频特性可求出最大超前相角对应的频率m ,m 是两个转折频率的几何中心点;在m处的对数幅值为10lga。图69 无源超前网络 的Bode图20dB/decL()dB090(度)20lgadB(6-5)第14页/共111页15(2)滞后校正网络Z1=R1 Z2=R2+1/CSG(s)=Z2/(Z1+Z2)=(1+bTS)/(1+TS)(6-6)T=(R1+R2)Cb=R2/(R1+R2)1UiUoR1R2C图6-10 无源滞后网络第15页/共111页16滞后网络零、极点在S平面上的分布(图6-11)向量zs和ps与实轴正方向的夹角的差值小于零,即 =zpb1b2b3图61
11、21第16页/共111页17图6-13 滞后网络的b-m曲线当m-60度时,滞后相角增加缓慢。0.0010.010.1-90-60-300(度)m b (6-8)当b值趋于零时,单个滞后网络的最大滞后相角m=-90度;当b=1时,网络本质上是一个比例环节,此时 m=0度。m与参数b之间的关系如图6-13。第17页/共111页18图6-14 无源滞后网络(1+bTS)/(1+TS)的Bode图由相频特性可求出最大滞后相角对应的频率为最大的幅值衰减为20lgb,最大的衰减频率范围是(6-9)20lgb-900dB-20dB/dec1/Tm1/bT第18页/共111页196-3 串联校正 当控制系统
12、的性能指标是以稳态误差ess、相角裕度、幅值裕度Kg、相对谐振峰值Mr、谐振频率r和系统带宽b等频域性能指标给出时,采用频率特性法对系统进行综合与校正是比较方便的。因为在伯德图上,把校正装置的相频特性和幅频特性分别与原系统的相频特性和幅频特性相叠加,就能清楚的显示出校正装置的作用。反之,将原系统的相频特性和幅频特性与期望的相频特性和幅频特性比较后,就可得到校正装置的相频特性和幅频特性,从而获得满足性能指标要求的校正网络有关参数。第19页/共111页201.串联超前校正 超前校正的主要作用是在中频段产生足够大的超前相角,以补偿原系统过大的滞后相角。超前网络的参数应根据相角补偿条件和稳态性能的要求
13、来确定。例6-4 设单位反馈系统的开环传递函数为 Go(S)=K/(S(0.1S+1)(0.001S+1)要求校正后系统满足:(1)相角裕度 45o;(2)稳态速度误差系数Kv=1000秒-1.解 由稳态速度误差系数Kv求出系统开环放大系数K=Kv=1000s-1,由于原系统前向通道中含有一个积分环节,当其开环放大系数 K=1000s-1时,能满足稳态误差的要求。第20页/共111页21根据原系统的开环传递函数Go(S)和已求出的开环放大系数K=1000s-1绘制出原系统的对数相频特性和幅频特性(如图6-15)。根据原系统的开环对数幅频特性的剪切频率c=100弧度/秒,求出原系统的相角裕度 0
14、o,这说明原系统在K=1000s-1时处于临界稳定状态,不能满足 45o的要求。为满足 45o的要求,给校正装置的最大超前相角m增加一个补偿角度,即有m=+=50o;由式(6-4)可求出校正装置参数=7.5通常应使串联超前网络最大超前相角m对应的频率m与校正后的系统的剪切频率c重合,由图6-9可求出m所对应的校正网络幅值增益为10lg=10lg7.5=8.75dB,从图6-28中原系统的幅频特性为-8.75dB处求出m=c=164弧度/秒,由 得串联超前校正装置的两个交接频率分别为第21页/共111页22超前校正装置的传递函数为 经过校正后系统的开环传递函数为 根据校正系统后的开环传递函数G(
15、S)绘制伯德如图6-15。相角裕度=45度,幅值穿越频率c=164弧度/秒第22页/共111页23 图6-15 串联校正前后控制系统的对数频率特性未校正校正后10010900(度)-90-180-270()1000m=50度r=45度-20dB/dec-20dB/dec-40dB/dec-40dB/dec-60dB/dec-40dB/dec未校正校正后L()6040205210100164cc1000450第23页/共111页24串联超前校正对系统的影响增加开环频率特性在剪切频率附近的正相角,从而提高了系统的相角裕度;减小对数幅频特性在幅值穿越频率上的负斜率,从而提高了系统的稳定性;提高了系统
16、的频带宽度,从而提高了系统的响应速度;不影响系统的稳态性能.但若原系统不稳定或稳定裕量很小且开环相频特性曲线在幅值穿越频率附近有较大的负斜率时,不宜采用相位超前校正;因为随着幅值穿越频率的增加,原系统负相角增加的速度将超过超前校正装置正相角增加的速度,超前网络就起不到补偿滞后相角的作用了.第24页/共111页25串联超前校正频率特性法的步骤(1)根据稳态性能的要求,确定系统的开环放大系数K;(2)利用求得的K值和原系统的传递函数,绘制原系统的伯德图;(3)在伯德图上求出原系统的幅值和相角裕量,确定为使相角裕量达到规定的数值所需增加的超前相角,即超前校正装置的m值,将m值代入式(6-4)求出校正
17、网络参数,在伯德图上确定原系统幅值等于-10lg对应的频率c;以这个频率作为超前校正装 置 的 最 大 超 前 相 角 所 对 应 的 频 率 m,即 令m=c;(4)将已求出的m和的值代入式(6-5)求出超前网络的参数T和T,并写出校正网络的传递函数 Gc(s);(5)最后将原系统前向通道的放大倍数增加Kc=a倍,以补偿串联超前网络的幅值衰减作用,写出校正后系统的开环传递函数G(S)=KcGo(s)Gc(s),并绘制校正后系统的伯德图,验证校正的结果。第25页/共111页262.串联滞后校正 串联滞后校正装置的主要作用,是在高频段上造成显著的幅值衰减,其最大衰减量与滞后网络传递函数中的参数b
18、(b 1)成反比。当在控制系统中采用串联滞后校正时,其高频衰减特性可以保证系统在有较大开环放大系数的情况下获得满意的相角裕度或稳态性能。解 按开环放大系数K=30秒1的要求绘制出原系统的伯德图(如图6-16所示)。从图6-16看出,原系统的剪切频率c=11弧度/秒,其相角裕度=25o,显然原系统是不稳定系统。从相频特性可以看出,虽然原系统的相角裕度(=25o)的绝对值并不大,但在剪切频率c附近,相频特性的变化速率较大,如前所述,此时采用串联超前校正很难奏效。在这种情况下,可以考虑采用串联滞后校正。举例说明如下:例6-5 设原系统的开环传递函数为 Go(S)=K/S(0.1S+1)(0.2S+1
19、)试用串联滞后校正,使系统满足:(1)K=30秒-1;(2)相角裕度40o。第26页/共111页27图6-16 串联滞后校正前后控制系统的对数频率特性-20dB/dec-40dB/dec-20dB/dec-40dB/dec校正后未校正0.030.330c c-20dB/dec20lgb-60dB/dec8060oL()0-90-180-270-25o+40oGcGoGcGo()3第27页/共111页28根据相角裕度40o的要求,同时考虑到滞后网络的相角滞后影响(初步取=5o),在原系统相频特性Go(j)上找到对应相角为-180o+(45o+5o)=-135o处的频率c3弧度/秒,以c作为校正后
20、系统的剪切频率。在c=3弧度/秒处求出原系统的幅值为 ,由图6-14可知,滞后网络的最大幅值衰减为 ,令 可求出滞后网络参数b=0.1。当b=0.1时,为了确保滞后网络在c处只有 滞后相角,则应使滞后校正网络的第二交接频率1/bT=c/10,即1/bT=0.3弧度/秒,由此求出滞后网络时间常数T=33.3秒,即第一交接频率为1/T=0.03弧度/秒。串联校正网络的传递函数为 第28页/共111页29校正后系统的开环传递函数为G(S)=Go(S)Gc(S)=30(3.33S+1)/S(0.1S+1)(0.2S+1)(33.3S+1)绘制校正后系统的伯德图(如图6-16)。从图中可看出,当保持K=
21、30/秒不变时(保证系统的稳态性能指标),系统的相角裕度由校正前的=-25o提高到+40o,说明系统经串联滞后校正后具有满意的相对稳定性。但同时,校正后系统的剪切频率降低,其频带宽度b由校正前的15弧度/秒下降为校正后的5.5弧度/秒,这意味着降低系统响应的快速性,这是串联滞后校正的主要缺点。这个问题还可以从S平面上看出,经串联滞后校正的系统,在原点附近会出现一个闭环极点,由于它不可能为闭环零点所补偿,在一定程度上降低了系统的响应速度。若上述闭环极点被闭环零点完全补偿,则系统的开环放大系数便不能提高,因而也就失去了串联滞后校正的本来意义。采用串联滞后校正虽然使系统的宽带变窄,响应速度降低,但却
22、同时提高了系统的 抗干扰能力。第29页/共111页30串联滞后校正对系统的影响在保持系统开环放大系数不变的情况下,减小剪切频率,从而增加了相角裕度,提高了系统相对稳定性;在保持系统相对稳定性不变的情况下,可以提高系统的开环放大系数,从而改善系统的稳态性能;由于降低了幅值穿越频率,系统宽带变小,从而降低了系统的响应速度,但提高了系统抗干扰的能力。第30页/共111页31串联滞后校正频率特性法的步骤按要求的稳态误差系数,求出系统的开环放大系数K;根据K值,画出原系统的伯德图,测取原系统的相角裕度和幅值裕度,根据要求的相角裕度并考虑滞后角度的补偿,求出校正后系统的剪切频率c;令滞后网络的最大衰减幅值
23、等于原系统对应c的幅值,求出滞后网络的参数,即=10-L(c)/20(1时,按式(638)由 与 之差,得 。2.当 1,因此,近似处理的结果还是足够准确的。综合校正装置时,应先绘制 的渐近线,再按要求的性能指标绘制 的渐近线,由此确定 ,校验内回环的稳定性,最后按式(636)求得 。第49页/共111页50例68 控制系统的结构图如图623所示,其中 试设计反馈校正装置,使系统的性能指标为:。R(s)C(s)-图623 控制系统结构图解 校正前系统的开环传递函数为(1)绘制原系统的对数幅频特性L0如图624所示。(2)绘制系统的期望对数幅频特性。第50页/共111页51 根据式(5146),
24、得对应 时,按 秒,由式(6-24),得 。取 ,期望特性的交接频率 可由式(622)求得。取 。为简化校正装置,取中高频段的转折频率 。过 作 的直线过 线,低端至 处的A点,高端至 处的B点。再由A点作 的直线向低频段延伸与L0相交于C点,该点的频率为 ,过B点作 的直线向高频段延伸与L0相交于D点,该点的频率为 。由以上步骤得到的期望对数幅频特性如图624中LK所示。(3)将 得到 ,如图中LH所示,其传递函数为 其中,得 第51页/共111页520.011010010.1100040200-206080L0LKLHBDcA 图624 控制系统的对数幅频特性第52页/共111页53【例1
25、】设系统的开环传递函数为 现要求:1.单位斜坡输入时,位置输出稳态误差为 2.开环系统截止频率 试设计校正装置。3.相角裕度,幅值裕度 例题解析解解 根据 ,确定开环增益,系统为 I 型,取K=10 利用已确定的开环增益,作出系统的Bode 图,并计算未校正系统的相角裕度。第53页/共111页54图1(a)原系统Bode图第54页/共111页55根据 的要求,选用超前网络。第55页/共111页56图1(b)校正后系统的Bode图第56页/共111页57【例2】设单位反馈系统的开环传递函数为 若使系统的速度误差系数 ,相角裕度 ,截止频率不低于65rad/s,试求系统的校正装置。解解 由 ,,知
26、K=1。作未校正系统的Bode图如图2(a),得出 ,不满足要求。根据对截止频率的要求,采用超前校正。选 求原系统的相角裕度。第57页/共111页58所以有校正网络为 校正后系统的开环传递函数为作校正后系统的Bode图如图2(b).相角裕度为满足要求。第58页/共111页59图2(a)原系统Bode图第59页/共111页60图2(b)校正后系统的Bode图第60页/共111页61【例3】设控制系统的开环传递函数为试设计一串联校正装置,使校正后系统的相角裕度不小于40o,幅值裕度不低于10dB,剪切频率大于1rab/s。解 作校正前系统的对数频率特性如图3(a)所示。由图(a)可知,原系统具相角
27、裕度和幅值裕度均为负值,故系统不稳定。考虑到系统的剪切频率为 ,大于系统性能指标要求的剪切频率,故采用滞后装置对系统进行校正。根据相角裕度 的要求和滞后装置对系统相角的影响,选择校正后系统的相角裕度为 ,由图(a)知,对应相角为 时的频率为 ,幅值为15.7dB。取 ,得 。取滞后装置的第二个转折频率为 ,有 ,则 。初选校正装置的传递函数为 第61页/共111页62初选校正装置的传递函数为作出校正后系统的 Bode 图如图3(b)中所示。由图,可得到校正后系统的相角裕度为 ,幅值裕度为 ,剪切频率为 ,满足系统性能指标的要求,故初选校正装置合适,校正后系统的开环传递函数为 第62页/共111
28、页63图3(a)校正前系统的对数幅频特性第63页/共111页64图3(b)校正后系统的Bode图第64页/共111页656.5 设计实例:本例的设计目标是用机器代替手工操作,为小型电的转子缠绕铜线。每个小型电机都有3个独立的绕圈上面需要缠绕几百圈的铜线。绕线机用直流电机来缠绕铜线,它应该能快速准确地绕线,并使线圈连贯坚固。采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕线圈子等简单操作。控制系统设计的具体目标是:使绕线速度和缠绕位置都具有很高的稳态精度。绕线机控制系统如图6.26(a)所示,相应的框图如图6.26(b)所示。该系统至少是个I型系统。它响应阶跃输入的稳态误差为
29、零。(1)转子绕线机控制系统 第65页/共111页66图6.26第66页/共111页67当 时,我们有 。取K=500,则有,系统具有 足够的稳态精度。但由于系统阶跃响应的超调量将高达70%,调节时间长达8s,因此,此时的设计结果不能满足实际需要。为此,我们尝试为系统引入超前校正网络,即斜坡输入的稳态误差其第67页/共111页68为了使校正后的系统阻尼系数为=0.6,超调量降为3%,调节时间缩短为1.5s,在取定 之后,得到的超前校正网络为:但校正后的速度误差系数仅为:由此可见,采用超前校正网络也不能满足实际需要。接下来,我们再来尝试为系统引入滞后校正网络并取KV=38为:第68页/共111页
30、69于是,校正后的速度误差系数为:由未校正系统的根轨迹可知,当K=105时,未校正系统的超调量小于或等于以此为基础,可以确定校正后系统的预期主导极点再根据给定的Kv的预期值,可以确定的取值应为:为避免过分影响未校正系统的根轨迹,我们可以将滞后校正网络的零点和极点取为Z2=0.1,P2=0.0055.采用该滞后网络校正系统,使校正后的实际超调量为,调节时间为.s,基本上满足了实际需要第69页/共111页70综上所述,当控制器分别取为简单增益放大器、超前校正网络和滞后校正网络时,我们得到的了不同的设计结果,如表.所示。表6.3第70页/共111页71 让我们回到前面的超前校正网络,并为它串联一个滞
31、后的校正网络,从而得到一个超前滞后校正网络,其传递函数为:超前校正网络的参数应取为K=191.2,Z1=4,p1=7.3。在经过超前校正之后,系统的根轨迹如图.所示,而系统的速度误差系数仅为Kv=2.1。为了提高系统的速度误差系数,我们再为系统串联一个滞后校正网络。若Kv的预期值为,则应有,于是,滞后校正网络的零点和极点可以取为Z2=0.1 和 P2=0.01,使整个系统的开环传递函数变为:(6.31)第71页/共111页72图.经过超前校正后的系统根轨迹(6.32)第72页/共111页73经这样校正后,系统的阶跃响应和斜坡响应分别如图.的(a)和(b)所示,相应的性能则如表.最后一列所示从中
32、可以看出,采用超前滞后校正网络后,我们得到了综合性能更为满意的设计结果。6.28 转子绕线机的响应曲线第73页/共111页74()设计实例:X-Y绘图仪许多物理现象都可以用瞬变或缓变参数来描述,及时记录这些参数的变化,有利于事后的检查和分析,也有利于在未来的试验中进行参考和对比。为了满足实时记录的需要,人们发明了各种各样的记录仪器,其中比较典型的是本例要研究的X-Y绘图仪。在X-Y绘图仪中,X轴方向的位移代表了时间变量或其他感兴趣的变量,而Y轴方向的位移则代表了另一个变量,它通常还是前一个变量的函数。很多实验室都用类似的设备来记录各种实验数据,如温度的变化、转换器输出的变化、应力随张力的变化。
33、图6.29给出了HP7090A型绘图仪的实物照片。图.图6.29第74页/共111页75记录笔位置控制系统的设计要求是:(1)阶跃响应的超调量小于5%,按2%准则的调节时间小于0.5s;(2)阶跃响应的稳态误差为零。如果满足了上述设计要求,记录笔位置控制系统就可以获得快速准确的响应,从而满足实际工作的需要。在记录笔位置控制系统中,我们用直流电机来移动记录笔,用一个500线的光学编码器来充当反馈传感器。该光学编码器提供可以给出2000个测量值,因此,在测量记录笔位移时,编码器的分辨率可以达到0.01英寸。光学编码器提供的测量信号是数字信号,因此,在实际控制系统中,我们采用微处理器进行比对求差,所
34、得的差值就是反馈系统的偏差信号。此外,微处理器还能完成有关的运算,同时起到校正网络的作用。在完成了校正计算之后,实际控制系统将“校正网络“(微处理器)的数字输出转换成模拟信号,以便驱动直流电机。第75页/共111页76 绘图仪记录笔的位置控制系统模型如图6.30所示。与编码器的运行速度和输入信号的变化速度相比,微处理器具有很快的运算速度,因此,我们不必考虑系统时延,采用连续信号模型就可以足够准确地描述记录笔位置控制系统。以此为基础,我们来具体设计记录笔位置控制系统。6.30 绘图仪控制系统模型第76页/共111页77假定电机和记录笔的传递函数为:(6.33)我们首先尝试采用简单的增益放大器作为
35、校正器,即在此情况下,系统只有一个可调参数,即增益 K。为了迅速达到稳态响应,我们必须调整K的取值,使系统主导极点对应的阻尼系数变成0.707,阶跃响应的超调量仅为4.5%。第77页/共111页78图6.31给出了以K为可调参数的根轨迹图,从中可以看出,为了保证=0.707,我们应将增益K的取值调整为47200。这样我们就会得到一个I型系统,它的阶跃响应的稳态误差为零,超调量为3.6%,调节时间为0.8s。由于调节时间太长,该设计结果不能满足给定的设计要求。图6.31 绘图仪的根轨迹,图中给出的主导极点为 s=-4.9+/-j4.9,相应的阻尼系数为=0.707第78页/共111页79 接下来
36、,我们尝试采用超前校正网络来减少系统的调节时间,于是可以取(6.34)而且有p=z 不妨采用上节给出的根轨迹方法来设计这个超前校正网络。为了减小系统的调节时间,在保持=0.707的前提下,我们应增大系统的固有频率n。为此,可以将超前校正网络的零点取为s=-20,由于预期主导极点位于s=-20的上方,由根轨迹条件可得,超前校正网络的极点应为s=-60.与已经得到的超前校正网络的零、极点对应,于是又有=3,以及(6.35)第79页/共111页80 计算校正后的实际阶跃响应可得,系统的超调量为2%,调节时间为0.35s。这些结果表明,带有超前校正网络的系统基本上满足了给定的设计要求。在直流电机的旋转
37、轴上,设有一个相应稳定的参考点。参考点在单位时间内扫过的编码器光线线数反映了记录笔的运动速度。利用这个措施,我们可以用微处理器来提取记录笔的测量信息和速度测量信息,“校正网络”可以简单的取为:(6.36)其中K1是偏差信号的增益,K2是速度信号的增益。第80页/共111页81采用(6.35)所用的校正网络,系统的开环传递函数变为:再取定K1/K2=10,我们可以对销掉开环极点,于是又有(6.37)闭环系统的特征方程因而变成:第81页/共111页82 为了保证=0.707,由2Wn=1000可知,应有 Wn=707,再由 K2=Wn*Wn可知,应有K2=5*1000000.于是最终得到的校正后的
38、系统开环传递函数为:(6.38)经验证计算后可知,采用式(6.35)所示的校正网络后,该系统的阶跃响应的超调量为4.3%,调节时间为8ms.表6.4总结了上面的三种设计结果,这些结果表明,利用了速度反馈的校正方案是最好的实际方案。这也正是HP7090A采用的实际方案。表6.4第82页/共111页836.6 利用MATLAB 进行系统设计 本节借助MATLAB软件,进一步讨论了控制系统校正网络的设计问题,所采用的设计方法仍然是频率响应法和s平面上的根轨迹方法。讨论时,仍以6.4节的转子绕线机控制系统为例,展示如何用MATLAB文本来进行计算机辅助设计与开发,以获得满意的系统性能。结合这个设计实例
39、,本节再次考虑了超前和滞后两种网络,并MATLAB程序画出了相应的系统响应曲线。第83页/共111页84其中 设计绕线机控制系统时,我们考虑稳态跟踪误差的同时,还应兼顾超调量和调节时间等性能指标,因此,简单的增益放大器无法满足实际需要。在这种情况下,我们将采用超前校正网络或滞后校正网络来校正系统。此外,为了充分说明采用MATLAB的辅助设计过程,我们将用Bode图方法来设计超前校正网络,同时又用s平面的根轨迹方法来设计滞后校正网络。1.转子绕线机控制系统 系统的设计目标是:使绕线机系统对斜坡输入有很高的稳态精度。系统对单位斜坡输入R(s)=1/s*s 的稳态误差为:第84页/共111页85首先
40、考虑简单的增益放大 器Gc(s),此时有系统的稳态误差为:由此 可见,K的取值越大,稳态误差Ess越小,但增加K的取值将对系统的瞬态响应产生不利的影响。图6.32给出了不同K值下的系统响应,从中可以看出,当K=500时系统对斜坡输入的稳态误差为10%,而系统对阶跃输入的超调量则高达70%,调节时间长达8s。这样的系统根本不能满足实际要求,因此必须为系统引入较为复杂的校正网络,既超前校正网络或滞后校正网络。第85页/共111页86图 6.32第86页/共111页87 超前校正网络能够改善系统的瞬态响应性能,因此,我们首先尝试采用它来校正系统,并采用Bode图方法进行校正网络设计。超前校正网络的传
41、递函数为:其中 。给定的系统设计要求是:(1)系统对斜坡输入响应的稳态误差小于10%,;(2)系统对阶跃输入的超调小于10%(3)按2%准则的调节时间T,不超过3s,第87页/共111页88根据给定的设计要求,有关的近似公式可以写成:求解上述方程可得:由此可以推知,系统的相角裕度为:第88页/共111页89 在明确了频率域内的设计要求之后,就可以按照下面的步骤设计超前校正网络:(1)绘制K=500时未校正系统的Bode图,并计算相角裕度(2)确定所需的附加超前相角;(3)根据 ,计算校正网络参数;(4)计算10 log,在未校正系统的Bode图上,确定与幅值增益-10log对应的频率 ;(5)
42、在频率 附近绘制校正后的幅值增益渐近线,该渐近直线在 处与0db线相交,斜率等于未校正时的斜率加上20db/dec。确定了超前校正网络的零点。再根据p=z,计算得到超前校正网络的极点;(6)绘制校正后的Bode图,检验所得系统的相角裕度是否满足了设计要求。如不满足,重复前面的各设计步骤;(7)增大系统增益,补偿由超前校正网络带来的增益衰减(1/)(8)仿真计算系统的阶跃响应,验证最后的设计结果。如果设计结果不能满足实际要求,再重复前面的各设计步骤。第89页/共111页90图6.33第90页/共111页91 在用MATLAB 进行上述设计步骤时,我们使用了3个程序文本,分别如图6.32-6.34
43、所示。它们分别用来产生未校正系统的Bode图、校正后系统的Bode图和校正后系统的实际阶跃响应。通过运行这些文本,可以得到本例所需的超前校正网络,其参数取值分别为z=3.5,p=25以及K=1800.于是有 引入超前校正网络后,校正后的系统能满足对调节时间和超调量的设计要求,但不能满足对稳态误差的设计要求(即Kv=5),系统斜坡响应的问题稳态误差将高达20%,尽管闭环系统的稳态误差仍然超标,但已有的结果表明,超前校正网络已经明显地增加了系统的相角裕度,改善了系统的瞬态性能。如果继续重复上面的设计过程,可望进一步改进已有的设计结果。第91页/共111页926.34 超前校正网络第92页/共111
44、页93 为了减少系统的稳态误差,我们再来尝试用根轨迹方法设计滞后校正网络。滞后校正网络的传递函数为:其中根据已知条件,可推知由此可以得到预期的闭环主导极点。第93页/共111页94滞后校正网络的设计步骤可以归纳为:2.根据 ,确定预期主导极点的允许区域,并进一步在未校正根轨迹上确定校正后的预期主导极点;3.计算与预期主导极点对应的系统增益和未校正系统的速度误差系数4.计算 。在本例中,我们有5.根据求得的,确定滞后校正网络的零点和极点,使得校正后的根轨迹经过预期的主导极点;6.仿真计算系统的实际响应,检验设计结果。如果需要,就重复前面的设计步骤。1.绘制未校正系统的根轨迹第94页/共111页9
45、5 图6.35-6.37中分别给出了设计过程中使用的3个MATLAB 文本及其画出的相应图形曲线。在本例的设计过程中,根据选定的预期主导极点,我们用rlocfind函数计算了增益 k的相应取值,于是得到了K=100;为了满足对Kv的设计要求,有计算了的合适取值,从而得到了=10;在配置滞后校正网络的零点和极点时,我们将零点和极点分别取为s=-0.1和s=-0.01,它们都非常接近s平面的原点,因而避免了明显改变未校正系统的根轨迹。至此,我们得到了所需要的滞后校正网络为:经过验证后可知,校正后的系统基本满足了对调节时间和超调量的设计要求,而系统的速度误差系数也达到了Kv=10,同样满足设计要求。
46、重复上述设计过程,还可以进一步改进已有的设计结果。最后,我们将本节得到的三种设计结果归纳于表6.5中。第95页/共111页966.35 滞后校正网络第96页/共111页97图6.36 滞后校正网络第97页/共111页98图6.37 滞后校正网络第98页/共111页99 2.循序渐进设计示例:磁盘驱动读取系统 本章将为磁盘驱动读取系统设计一个合适的PD控制器,使得系统能够满足对单位阶跃响应的设计要求。给定的设计要求如表6.6所示,闭环系统的框图模型如图6.38所示。从图中可以看出,我们为闭环系统配置了前置滤波器,其目的在于消除零点因式(s+z)对闭环传递函数的不利影响。为了得到具有最小拍响应的系
47、统,针对图6.38给出的2阶模型,我们将预期的闭环传递函数取为:表6.6第99页/共111页100由表6.2可知,对应的标准化传递函数的系数应为:=1.82标准化调整时间为:而实际系统对调节时间的设计要求为于是可取在这种情况下,调节时间的预期值满足了设计要求。这样式(6.39)的分母则为:(6.39)(6.40)第100页/共111页1016.38 带有PD控制器的磁盘驱动器控制系统(2阶系统模型)第101页/共111页102由此可得到图6.39所示闭环系统的特征方程为:(6.41)比较式(6.4.)和(6.41)的系数,有解之,可得至此,便得到了所需要的PID控制器为:第102页/共111页
48、103然后,将前置滤波器取为:就能进一步对销引入PD控制器新增的闭环零点。本例的模型忽略了电机磁场的影响,但所得的设计仍然是很准确的。表6.6给出了系统的实际响应,从中可以看出,系统的所有指标都满足了设计要求。第103页/共111页104本章小结 (1)(1)系统的综合与校正问题 为了使原系统在性能指标上的缺陷得到改善或补偿而按照一定的方式接入校正装置和选定校正元件参数的过程就是控制系统设计中的综合与校正问题。从某中意义上讲,系统的综合与校正是系统分析的逆问题。系统分析的结果具有唯一性,而系统的综合与校正是非唯一的。(2)校正方式 根据校正装置与原系统的连接方式可分为串联校正,顺馈校正和反馈校
49、正三种方式;根据校正装置的特性可分为超前校正和滞后校正。第104页/共111页105 (3)超前校正 超前校正装置具有相位超前作用,它可以补偿原系统过大的滞后相角,从而增加系统的相角裕度和带宽,提高系统的相对稳定性和响应速度。在S域内,超前校正装置的零点比极点更靠近原点,它可以改变原系统根轨迹的形状,得到希望的零点。超前校正通常用来改善系统的动态性能,在系统的稳态性能较好而动态性能较差时,采用超前校正可以得到较好的效果。但由于超前校正装置具有微分的特性,是一种高通滤波装置,它对高频噪声更加敏感,从而降低了系统抗干扰的能力,因此在高频噪声较大的情况下,不宜采用超前校正。第105页/共111页10
50、6 (4)(4)滞后校正 滞后校正装置具有相位滞后的特性,它具有积分的特性,由于积分特性可以减少系统的稳态误差,因此滞后校正通常用来改善系统的稳态性能。滞后校正装置具有低通滤波的特性,利用它的高频衰减特性降低系统的剪切频率,可以提高系统的相角裕度,改善系统的动态性能。但同时减小了系统的带宽,降低了系统的响应速度。因此对响应速度要求较高的系统不宜采用滞后校正,高频衰减特性可以降低高频噪声对系统的影响,从而提高系统抗干扰能力,这是滞后校正的一大优点。第106页/共111页107(5)(5)滞后-超前校正 在系统的动态和稳态性能都有待改善时,单纯采用超前或滞后校正往往难以奏效,在这种情况下采用滞后-
51、超前校正效果较好,利用校正装置的滞后特性改善系统的稳态性能提高系统精度,而利用它的超前作用来改善系统的动态性能提高系统的相角裕度和响应速度等。在校正的步骤上,可以先满足系统的动态性能确定出校正装置中超前部分的参数,然后再根据稳态性能确定滞后部分的参数,也可以按相反的顺序设计。第107页/共111页108 (6)(6)反馈校正 反馈校正除了可以达到与串联校正相同的效果外。还可以抑制来自系统内部和外部扰动的影响,因此对那些工作环境比较差和系统参数变化幅度较大的系统,采用反馈校正效果会更好些。需要指出的是,由于局部反馈有可能引起校正回路的振荡,因此在选择校正装置参数时应特别小心。一般情况下,被校正装
52、置包围的前向通道一般不超过两个环节。(7)(7)顺馈校正 一般情况下,顺馈控制只是在反馈控制不能满足要求时才考虑采用。在扰动可测量时,采用顺馈控制(或顺馈校正)可有效地消除干扰的影响,它对减小稳态误差改善系统的稳态性能效果显著。但由于难以实现理想的微分装置,顺馈校正对改善系统的动态性能的效果不大。第108页/共111页109 (8)(8)混合校正 对于某些系统,有时为了达到全面改善系统性能的目的,也可以同时采用多种校正方式。但这并不意味着校正装置用得越多,方法越复杂就越好,在这个问题上应本着删繁就简的原则,用一种方法一个校正装置能解决问题的就决不采用两种方法或两个校正装置,因为系统接入的装置越
53、多,就越容易引入干扰信号。应当指出的是,本章介绍的只是系统校正中的一些基本方法和思路,所给例题也是典型化和理想化的,工程实际问题会复杂的多。比起系统分析,系统的综合与校正的实践性更强,读者应在实际应用中重视积累经验,才能取得更好的学习效果。The End第109页/共111页110#oXlUiQfNbK8H5D2A+x*u$qZnWkShPeMaJ7F4C1z)w&t!pYmUjRgOcL9I6E3B+y(v%r#oXlTiQfNbK8G5D2A-x*u$qZnVkShPdMaJ7F4C0z)w&s!pYmUjRfOcL9H6E3B+y(u%r#oWlTiQeNbJ8G5D1A-x*t$qYn
54、VkSgPdMaI7F3C0z)v&s!pXmUjRfOcK9H6E2B+y(u%rZoWlThQeNbJ8G4D1A-w*t$qYnVjSgPdLaI7F3C0y)v&s#pXmUiRfNcK9H5E2B+x(u$rZoWkThQeMbJ8G4D1z-w*t!qYnVjSgOdLaI6F3C0y)v%s#pXlUiRfNcK8H5E2A+x(u$rZnWkThPeMbJ7G4C1z-w&t!qYmVjRgOdL9I6F3B0y)v%s#oXlUiQfNcK8H5D2A+x*u$rZnWkShPeMaJ7G4C1z)w&t!pYmVjRgOcL9I6E3B0y(v%r#oXlTiQfNbK8G
55、5D2A-x*u$qZnVkShPdMaJ7F4C1z)w&s!pYmUjRgOcL9H6E3B+y(v%r#oWlTiQeNbK8G5D1A-x*t$qZnVkSgPdMaI7F4C0z)v&s!pXmUjRfOcK9H6E2B+y(u%r#oWlThQeNbJ8G5D1A-w*t$qYnVkSgPdLaI7F3C0z)v&s#pXmUiRfOcK9H5E2B+x(u%rZoWkThQeMbJ8G4D1z-w*t!qYnVjSgOdLaI6F3C0y)v&s#pXlUiRfNcK9H5E2A+x(u$rZoWkThPeMbJ7G4D1z-w&t!qYmVjSgOdL9I6F3B0y)v%s#
56、oXlUiQfNcK8H5D2A+x*u$rZnWkThPeMaJ7G4C1z-w&t!pYmVjRgOdL9I6E3B0y(v%s#oXlTiQfNbK8H5D2A-x*u$qZnWkShPdMaJ7F4C1z)w&s!pYmUjRgOcL9I6E3B+y(v%r#oXlTiQeNbK8G5D2A-x*YmVjRgOdL9I6E3B0y(v%s#oXlTiQfNbK8H5D2A-x*u$qZnWkShPdMaJ7F4C1z)w&t!pYmUjRgOcL9I6E3B+y(v%r#oXlTiQeNbK8G5D2A-x*t$qZnVkShPdMaI7F4C0z)w&s!pXmUjRfOcL9H6E
57、2B+y(u%r#oWlTiQeNbJ8G5D1A-x*t$qYnVkSgPdMaI7F3C0z)v&s!pXmUiRfOcK9H6E2B+x(u%rZoWlThQeMbJ8G4D1A-w*t!qYnVjSgPdLaI6F3C0y)v&s#pXmUiRfNcK9H5E2B+x(u$rZoWkThQeMbJ7G4D1z-w*t!qYmVjSgOdLaI6F3B0y)v%s#pXlUiQfNcK8H5E2A+x*u$rZnWkThPeMbJ7G4C1z-w&t!qYmVjRgOdL9I6F3B0y(v%s#oXlUiQfNbK8H5D2A+x*u$qZnWkShPeMaJ7F4C1z)w&t!pY
58、mUjRgOcL9I6E3B0y(v%r#oXlTiQfNbK8G5D2A-x*u$qZnVkShPdMaJ7F4C0z)w&s!pYmUjRfOcL9H6E3B+y(u%r#oWlTiQeNbJ8G5D1A-x*t$qYnVkSgPdMaI7F4C0z)v&s!pXmUjRfOcK9H6E2B+y(u%rZoWlThQeNbJ8G4D1A-w*t$qYnVjSgPdLaI7F3C0y)v&s#pXmUiRfNcK9H5E2B+x(u%rZoWkThQeMbJ8G4D1z-w*t!qYnVjSgOdLaI6F3C0y)v%s#pXlUiRfNcK8H5E2A+x(u$rZnWkThPeMbJ7
59、G4C1z-w&t!qYmVjSgOdL9I6F3B0y)v%s#oXlUiQfNcK8H5D2A+x*qYnVjSgOdLaI6F3C0y)v%s#pXlUiRfNcK8H5E2A+x(u$rZnWkThPeMbJ7G4D1z-w&t!qYmVjSgOdL9I6F3B0y)v%s#oXlUiQfNcK8H5D2A+x*u$rZnWkShPeMaJ7G4C1z)w&t!pYmVjRgOcL9I6E3B0y(v%s#oXlTiQfNbK8H5D2A-x*u$qZnWkShPdMaJ7F4C1z)w&s!pYmUjRgOcL9H6E3B+y(v%r#oWlTiQeNbK8G5D1A-x*t$qZn
60、VkSgPdMaI7F4C0z)w&s!pXmUjRfOcL9H6E2B+y(u%r#oWlThQeNbJ8G5D1A-w*t$qYnVkSgPdLaI7F3C0z)v&s#pXmUiRfOcK9H5E2B+x(u%rZoWlThQeMbJ8G4D1A-w*t!qYnVjSgPdLaI6F3C0y)v&s#pXlUiRfNcK9H5E2A+x(u$rZoWkThPeMbJ7G4D1z-w&t!qYmVjSgOdL9I6F3B0y)v%s#pXlUiQfNcK8H5E2A+x*u$rZnWkThPeMaJ7G4C1z-w&t!pYmVjRgOdL9I6E3B0y(v%s#oXlTiQfNbK8H
61、5D2A-x*u$qZnWkShPeMaJ7F4C1z)w&t!pYmUjRgOcL9I6E3B+y(v%r#oXlTiQeNbK8G5D2A-x*t$qZnVkShPdMaI7F4C0z)w&s!pXmUjRfOcL9H6E3B+y(u%r#oWlTiQeNbJ8G5D1A-x*t$qYnVkSgPdMaI7F3C0z)v&s!pXmUiRfOcK9D2A-x*t$qZnVkShPdMaI7F4C0z)w&s!pYmUjRfOcL9H6E3B+y(u%r#oWlTiQeNbJ8G5D1A-x*t$qYnVkSgPdMaI7F3C0z)v&s!pXmUiRfOcK9H6E2B+x(u%rZoW
62、lThQeNbJ8G4D1A-w*t$qYnVjSgPdLaI7F3C0y)v&s#pXmUiRfNcK9H5E2B+x(u$rZoWkThQeMbJ7G4D1z-w*t!qYmVjSgOdLaI6F3B0y)v%s#pXlUiRfNcK8H5E2A+x(u$rZnWkThPeMbJ7G4C1z-w&t!qYmVjRgOdL9I6F3B0y(v%s#oXlUiQfNbK8H5D2A+x*u$qZnWkShPeMaJ7G4C1z)w&t!pYmVjRgOcL9I6E3B0y(v%r#oXlTiQfNb4C1z-w&t!qYmVjRgOdL9I6F3B0y(v%s#oXlUiQfNcK8H5D2A
63、+x*u$rZnWkShPeMaJ7G4C1z)w&t!pYmVjRgOcL9I6E3B0y(v%r#oXlTiQfNbK8G5D2A-x*u$qZnVkShPdMaJ7F4C0z)w&s!pYmUjRgOcL9H6E3B+y(v%r#oWlTiQeNbK8G5D1A-x*t$qZnVkSgPdMaI7F4C0z)v&s!pXmUjRfOcK9H6E2B+y(u%rZoWlThQeNbJ8G5D1A-w*t$qYnVkSgPdLaI7F3C0z)v&s#pXmUiRfOcK9H5E2B+x(u%rZoWkThQeMbJ8G4D1z-w*t!qYnVjSgOdLaI6F3C0y)v%s#pXlU
64、iRfNcK9H5E2A+x(u$rZoWkThPeMbJ7G4D1z-w&t!qYmVjSgOdL9I6F3B0y)v%s#oXlUiQfNcK8H5D2A+x*uYnVjSgPdLaI6F3C0y)v&s#pXlUiRfNcK9H5E2A+x(u$rZoWkThPeMbJ7G4D1z-w&t!qYmVjSgOdL9I6F3B0y)v%s#oXlUiQfNcK8H5D2A+x*u$rZnWkThPeMaJ7G4C1z-w&t!pYmVjRgOdL9I6E3B0y(v%s#oXlTiQfNbK8H5D2A-x*u$qZnWkShPdMaJ7F4C1z)w&s!pYmUjRgOcL9I6E3B+
65、y(v%r#oXlTiQeNbK8G5D2A-x*t$qZnVkShPdMaI7F4C0z)w&s!pXmUjRfOcL9H6E2B+y(u%r#oWlThQeNbJ8G5D1A-x*t$qYnVkSgPdMaI7F3C0z)v&s!pXmUiRfOcK9H6E2B+x(u%rZoWlThQeMbJ8G4D1A-w*t!qYnVjSgPdLaI6F3C0y)v&s#pXlUiRfNcK9H5E2B+x(u$rZoWkThQeMbJ7G4D1z-w*t!qYmVjSgOdLaI6F3B0y)v%s#pXlUiQfNcK8HA-w*t!qYnVjSgPdLaI7F3C0y)v&s#pXmUiRfN
66、cK9H5E2B+x(u$rZoWkThQeMbJ7G4D1z-w*t!qYmVjSgOdLaI6F3B0y)v%s#pXlUiQfNcK8H5E2A+x*u$rZnWkThPeMbJ7G4C1z-w&t!qYmVjRgOdL9I6F3B0y(v%s#oXlUiQfNbK8H5D2A+x*u$qZnWkShPeMaJ7F4C1z)w&t!pYmUjRgOcL9I6E3B0y(v%r#oXlTiQfNbK8G5D2A-x*u$qZnVkShPdMaJ7F4C0z)w&s!pYmUjRfOcL9H6E3B+y(u%r#oWlTiQeNbG4C1z)w&t!pYmVjRgOcL9I6E3B0y(v%r#oXlTiQfNbK8G5D2A-x*u$qZnVkShPdMaJ7F4C0z)w&s!pYmUjRfOcL9H6E3B+y(u%r#oWlTiQeNbK8G5D1A-x*t$qZnVkSgPdMaI7F4C0z)v&s!pXmUjRfOcK9H6E2B+y(u%rZoWlThQeNbJ8G4D1A-w*t$qYnVjSgPdLaI7F3C0z)v&s#pXmUiRfOcK9H5E2B+x(u
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
