 全景拍摄原理
全景拍摄原理

《全景拍摄原理》由会员分享,可在线阅读,更多相关《全景拍摄原理(15页珍藏版)》请在装配图网上搜索。
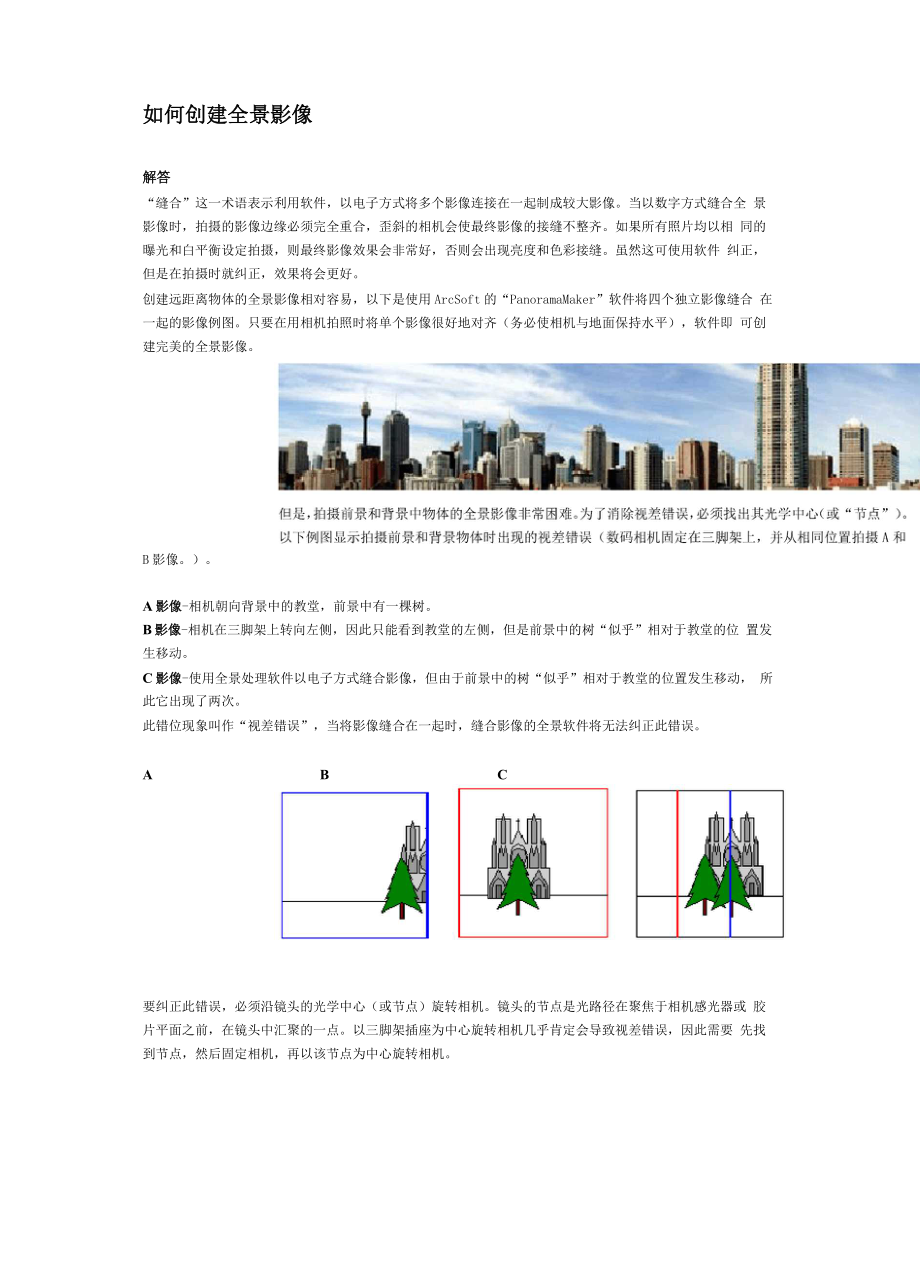
1、如何创建全景影像解答“缝合”这一术语表示利用软件,以电子方式将多个影像连接在一起制成较大影像。当以数字方式缝合全 景影像时,拍摄的影像边缘必须完全重合,歪斜的相机会使最终影像的接缝不整齐。如果所有照片均以相 同的曝光和白平衡设定拍摄,则最终影像效果会非常好,否则会出现亮度和色彩接缝。虽然这可使用软件 纠正,但是在拍摄时就纠正,效果将会更好。创建远距离物体的全景影像相对容易,以下是使用ArcSoft的“PanoramaMaker”软件将四个独立影像缝合 在一起的影像例图。只要在用相机拍照时将单个影像很好地对齐(务必使相机与地面保持水平),软件即 可创建完美的全景影像。B影像。)。A影像-相机朝向
2、背景中的教堂,前景中有一棵树。B影像-相机在三脚架上转向左侧,因此只能看到教堂的左侧,但是前景中的树“似乎”相对于教堂的位 置发生移动。C影像-使用全景处理软件以电子方式缝合影像,但由于前景中的树“似乎”相对于教堂的位置发生移动, 所此它出现了两次。此错位现象叫作“视差错误”,当将影像缝合在一起时,缝合影像的全景软件将无法纠正此错误。ABC要纠正此错误,必须沿镜头的光学中心(或节点)旋转相机。镜头的节点是光路径在聚焦于相机感光器或 胶片平面之前,在镜头中汇聚的一点。以三脚架插座为中心旋转相机几乎肯定会导致视差错误,因此需要 先找到节点,然后固定相机,再以该节点为中心旋转相机。节点可认为是从前端
3、镜头表面到镜头光学中心的度量,尼康不公布此信息,但可以通过以下步骤找到近似的节点。在使用全景云台进行正确定位时,请确定三脚架是固定的,仅相机可移动。1. 将相机安装在中央-确定相机镜头正好在旋转点的上方,这一点可从前端观看安装在三脚架上的 相机来进行检查。side view2. 调节视差错误-要找到并纠正视差错误,请使用相机、带全景云台的三脚架、一张桌子和四支笔(最好使用可以自行竖立起来的“麦克”笔)进行下述操作。如例图中所示放置四支笔。用全景云台将相 机安装在三脚架上,使最近和最远的笔可同时在相机的LCD显示屏(或取景器,如果使用的是SLR)上看使相机LCD显示屏或SLR取景器与笔成一直线观
4、看,然后从左向右平移相机以使笔在相机LCD显示屏中从 左侧移至右侧,在平移相机时注意各支笔之间的相对移动。用全景云台将相机后移或前移,直到在平移时 各笔之间的相对移动消失。在此示例中,相机太靠前。 在此示例中,相机位于适当位置, 在此示例中,相机太靠后。 相机沿镜头节点进行旋转。3. 将相机调水平-使用三脚架上的水平仪进行调校,如果没有水平仪,请使用一个小的附加水平装置。可借助全景云台将相机固定在三脚架上,这些云台可以固定相机,允许位置上的调整,并沿相机/镜头的光 学中心旋转相机/镜头。全景云台制造商的例子有 Kaiden 和 Manfrotto。 全景摄影是转动拍摄的,既然是转动,一定有轴心
5、的概念,也就是说以哪里为轴来转动。 全景摄影中,相机的转动,实际上应该以镜头的“节点”为轴。我们都知道云台的作用就是用来转动相机的,但是普通云台不是以镜头的节点为轴,在拍摄远景的情况下, 拼接瑕疵并不显见。但是当有近景的时候,由于转动镜头产生的节点位移,就会使拼接重叠部位的远近景 物位置变化而无法拼接。如果能够调整以镜头节点为轴,并且调整得精准,那么就不会节点位移,也就不会使相邻拼接的两张照片 在重叠部位有不同。节点调整的方法很多,最简便易行的是“远近参照物对比法”。步骤如下: 1,选远近两个垂直参照物,例如:两根铅笔,相隔一米以上;2,相机距离近物 30到50厘米,对准两根铅笔的笔尖,两点成
6、一线;3,左右转动相机,使铅笔分别到达取景框的最左和最右侧,观察两根铅笔的位移变化;4,在云台上向前或向后调整相机的位置,然后继续左右转动观察,直至没有位移变化为止无论怎么转动,远近景物都没有任何位移变化,就是节点正确的位置了。材料清单:1,闪光灯连接架直角板1 块;2,微距助手,齿轮微调直板 2块;3, M8x30沉头螺钉,8mm平垫,弹垫1套;4, M8x32 星型把手 1 个。5,水平转盘 50 元3000 元,酌情另购。版本2如下图所示,我们在眼前一前一后放两个柱状物体,例如铅笔、或者两根食指什么的:然后我们闭上一只眼睛,只用一只眼睛进行观察,知道这两只铅笔在我们的这只眼睛中间重合如下
7、图左部分示意:然后我们转动颈部,这是我们发现本来重合的铅笔开始错位了(如上图右所示)。接着我们重新调整自己的头部的转动方式,让我们在转动过程中眼睛看到的铅笔始终保持重叠的式样虽然我们不能直观解释到底我们是围绕什么转动才让我们一直在转动过程中看到两只铅笔一直保持重合, 但是通过上面的两幅图片分解分析,我们的转动中心其实是在我们那只眼球晶状体的“光心”上。其实相 机的镜头就好比我们眼睛的晶状体,相机的底片就是我们的视网膜。那么如果相机是围绕镜头的“光心即 节点”转动,他们在底片中成像的两只铅笔始终会保持重叠关系。而 保持这种重叠关系到底和我们拍摄全景、矩阵有什么用呢?下面我们就通过一个模拟实验来解
8、释:由上图我们看到,相机前有 3 组不同颜色的柱状物体,为了方便解说,我们特别将中间那组红色的柱体正 对相机。由于我们此时使用的是个视角较小的镜头,不能一次完全将三组柱体都拍摄下来,所以我们不得不让相机 沿着节点左右转动分别拍摄两张照片,最后通过后期软件或者人工的方式来进行合成。由于我们前面提到,中间的一组红色的柱体正对相机,而相机又沿着镜头的“光心 即 节点”转动,所有我们在这两张照片中就可以看到红色那组柱体始终保持中重合关系。正因为我们保证了这种重合的透视关系,在接下来的后期拼接中我们就可以很容易的完成拼接作业:通过拼接我们就得到了一张可以看完所有柱体的照片了。这里我们回头来思考下 如果当
9、初相机不是按照其镜头的“光心”来转动,就会像我们前面第一次用颈转动 头部来观察铅笔一样,中间这种红色的柱体会在这两张图片中以不同的错位透视关系反映在底片上。那就 势必对我们后期的拼接带来很多麻烦。通过以上样图说,我们就不再难以理解“节点”在全景与矩阵摄影中的作用了。而如何使用节点云台来找到镜头的节点,我们就可以用上面第 2 个实验(调整转动的方式,让眼睛在头部 转动过程中始终看到前面的铅笔保持重合关系)的方式来调节节点云台的转轴中心,以此来获得准确的镜 头节点位置。调试的方法和图说请见另一帖链接:好了,希望此帖能对初学者有帮助,尽快地掌握全景和矩阵摄影的一些关键技术疑问。关于节点调整的图说教程
10、与节点相关讨论 无论在拍摄球体全景还是矩阵接片的时候,大家已经知道精确定位镜头的节点是非常重要 的。特别是对物距较小的场景来说节点越精确后期越轻松。 当然,如果物距比较大的时候节点的要求就不是那么高了,甚至你手持拍摄都可以顺利通过 软件完成接片,关于物距大的情况我们接下来再讨论。现在让我们来讨论如何在通过图说快速理解节点偏移在照片上造成的结果愿应,及如何用图 说快速地找到镜头节点。首先我们来看镜头节点有可能出现的几种便宜情况红色标点表示镜头的准确节点位置,而黄色就是转轴的各种偏移情况。下面分别对每一种便宜情况给予图说解释, 每次在调整节点的时候我们通常通过对准参照物旋转机身的方式分别拍摄3 张
11、照片, 然后通过三张照片各自参照物遮挡关系以及遮挡范围大小的变化来判断转轴与镜头真正节 点偏移的方向。第一种情况: 镜头节点靠前第二种情况: 镜头节点靠后第三种情况: 镜头节点靠左第四种情况: 镜头节点靠右以上 4 类情况可以清晰的通过所拍摄的图片中参照物体发生的变化来对应快速地调整节点 云台,以获得精确的节点定位。以下 4 中情况也是在调整过程中常常容易发生的,这时我们不是简单的分析图片中参照物的 遮挡关系,而且要分析他们遮挡的程度大小关系。第五种情况: 镜头节点靠左前第六种情况: 镜头节点靠右前第七种情况: 镜头节点靠左后第八种情况: 镜头节点靠右后这样 8 中节点便宜方式的图说都表现出来
12、了,在实际调整过程中通过拍摄的图片对比上面的 图说便能快速直观地知道下一步该如何调整节点。方便大家快速地找到镜头精确的节点。物距大小与节点精确与否的关系在拍摄的球状全景的时候往往通常物距比较小,比如室内、近距离的景物等等,要求节点需 要相对非常精确,后期合片的时候才轻松自如。而在拍摄一些远景的矩阵接片时 物距通常比较大,而且近距离内的物体不会出现在画面中 时,拍摄时对镜头节点精度的要求就相对比较宽松。当物距足够大时你甚至转轴偏移节点很 大的范围都不会造成后期接片的问题。这其中的原理到底是为什么呢? 下面我们通过一个简单的几何作图示意来解释这个现象。此图我们可以看到相机在普通脚架上摇头的角度(蓝色区域)都是一样的 只是相机离物体的距离不同 这样我们就发现一个问题 当物距远时光线通过镜头节点的路径(红色)与正确节点光线的 路径(黑色)的夹角越来越小。如果物距足够远 那么这个夹角就越倾向为 0夹角为0 就意味着相机的摇头是以镜头节点为中心的。这就是为什么物距越大对节点精确要求不高,而物距约小对节点精度要求越高的原因了。 掌握了这个原理在实际运用中就可以灵活方便的处理问题了。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
