 信号与系统实验报告材料实验三 连续时间LTI系统的频域分析报告
信号与系统实验报告材料实验三 连续时间LTI系统的频域分析报告

《信号与系统实验报告材料实验三 连续时间LTI系统的频域分析报告》由会员分享,可在线阅读,更多相关《信号与系统实验报告材料实验三 连续时间LTI系统的频域分析报告(17页珍藏版)》请在装配图网上搜索。
1、word实验三 连续时间LTI系统的频域分析一、实验目的1、掌握系统频率响应特性的概念及其物理意义;2、掌握系统频率响应特性的计算方法和特性曲线的绘制方法,理解具有不同频率响应特性的滤波器对信号的滤波作用;3、学习和掌握幅度特性、相位特性以及群延时的物理意义;4、掌握用MATLAB语言进行系统频响特性分析的方法。基本要求:掌握LTI连续和离散时间系统的频域数学模型和频域数学模型的MATLAB描述方法,深刻理解LTI系统的频率响应特性的物理意义,理解滤波和滤波器的概念,掌握利用MATLAB计算和绘制LTI系统频率响应特性曲线中的编程。二、实验原理及方法1 连续时间LTI系统的频率响应所谓频率特性
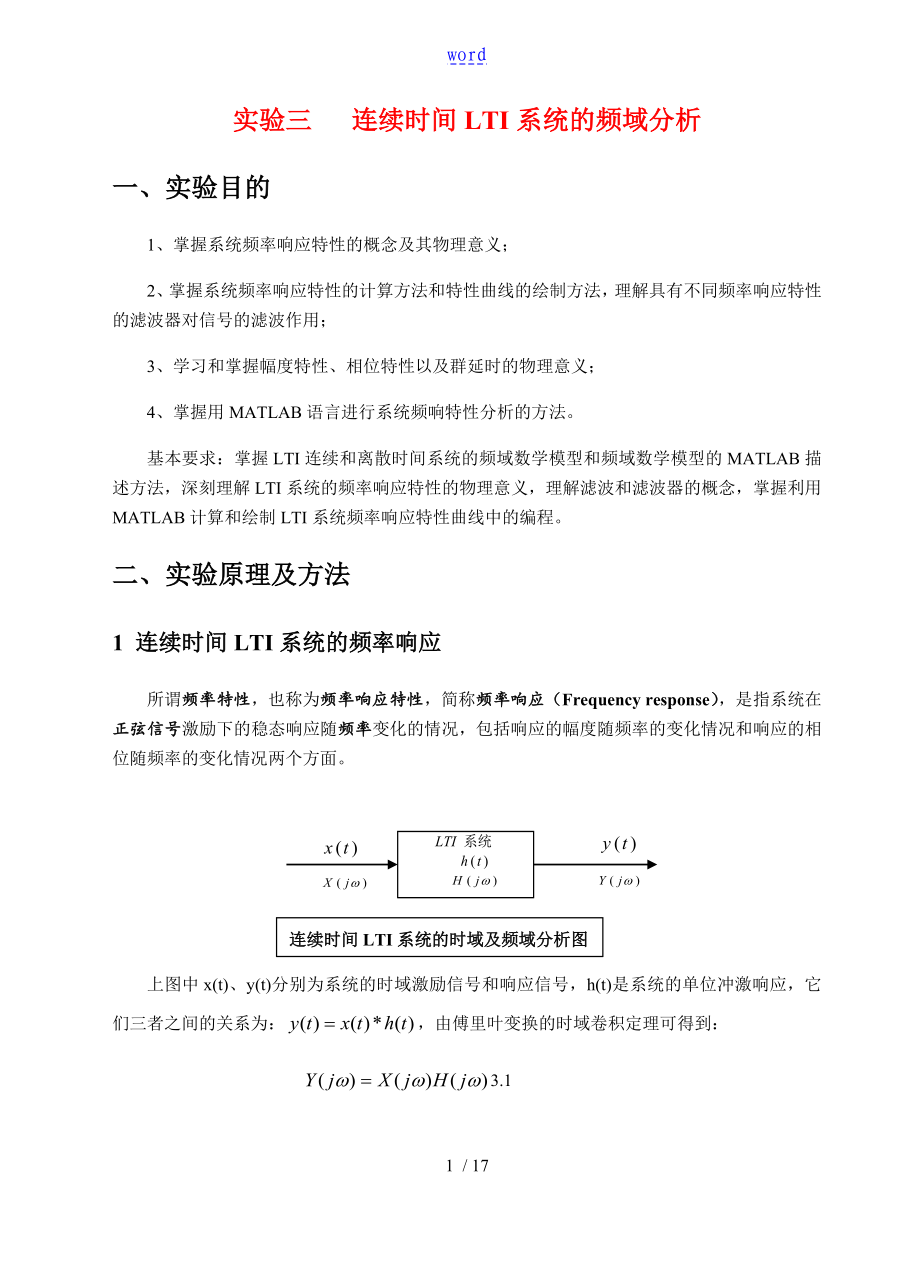
2、,也称为频率响应特性,简称频率响应(Frequency response),是指系统在正弦信号激励下的稳态响应随频率变化的情况,包括响应的幅度随频率的变化情况和响应的相位随频率的变化情况两个方面。连续时间LTI系统的时域及频域分析图 上图中x(t)、y(t)分别为系统的时域激励信号和响应信号,h(t)是系统的单位冲激响应,它们三者之间的关系为:,由傅里叶变换的时域卷积定理可得到:3.1或者: 3.2为系统的频域数学模型,它实际上就是系统的单位冲激响应h(t)的傅里叶变换。即 3.3由于H(jw)实际上是系统单位冲激响应h(t)的傅里叶变换,如果h(t)是收敛的,或者说是绝对可积(Absolut
3、ly integrabel)的话,那么H(jw)一定存在,而且H(jw)通常是复数,因此,也可以表示成复数的不同表达形式。在研究系统的频率响应时,更多的是把它表示成极坐标形式: 3.4上式中,称为幅度频率相应(Magnitude response),反映信号经过系统之后,信号各频率分量的幅度发生变化的情况,称为相位特性(Phase response),反映信号经过系统后,信号各频率分量在相位上发生变换的情况。和都是频率w的函数。对于一个系统,其频率响应为H(jw),其幅度响应和相位响应分别为和,如果作用于系统的信号为,则其响应信号为 3.5若输入信号为正弦信号,即x(t) = sin(w0t)
4、,则系统响应为 3.6可见,系统对某一频率分量的影响表现为两个方面,一是信号的幅度要被加权,二是信号的相位要被移相。由于和都是频率w的函数,所以,系统对不同频率的频率分量造成的幅度和相位上的影响是不同的。2 LTI系统的群延时从信号频谱的观点看,信号是由无穷多个不同频率的正弦信号的加权和(Weighted sum)所组成。正如刚才所述,信号经过LTI系统传输与处理时,系统将会对信号中的所有频率分量造成幅度和相位上的不同影响。从相位上来看,系统对各个频率分量造成一定的相位移(Phase shifting),相位移实际上就是延时(Time delay)。群延时(Group delay)的概念能够较
5、好地反映系统对不同频率分量造成的延时。LTI系统的群延时定义为:3.7群延时的物理意义:群延时描述的是信号中某一频率分量经过线性时不变系统传输处理后产生的响应信号在时间上造成的延时的时间。如果系统的相位频率响应特性是线性的,则群延时为常数,也就是说,该系统对于所有的频率分量造成的延时时间都是一样的,因而,系统不会对信号产生相位失真(Phase distortion)。反之,若系统的相位频率响应特性不是线性的,则该系统对于不同频率的频率分量造成的延时时间是不同的,因此,当信号经过系统后,必将产生相位失真。3 用MATLAB计算系统频率响应在本实验中,表示系统的方法仍然是用系统函数分子和分母多项式
6、系数行向量来表示。实验中用到的MATLAB函数如下:H,w=freqs(b,a):b,a分别为连续时间LTI系统的微分方程右边的和左边的系数向量(Coefficients vector),返回的频率响应在各频率点的样点值(复数)存放在H中,系统默认的样点数目为200点;Hm =abs(H):求模数,即进行运算,求得系统的幅度频率响应,返回值存于Hm之中。real(H):求H的实部;imag(H):求H的虚部;phi=atan(-imag(H)./(real(H)+eps):求相位频率相应特性,atan()用来计算反正切值;或者phi = angle(H):求相位频率相应特性;tao = grp
7、delay(num,den,w):计算系统的相位频率响应所对应的群延时。计算频率响应的函数freqs()的另一种形式是:H = freqs(b,a,w):在指定的频率围计算系统的频率响应特性。在使用这种形式的freqs/freqz函数时,要在前面先指定频率变量w的围。例如在语句H = freqs(b,a,w)之前加上语句:w = 0:2*pi/256:2*pi。 下面举例说明如何利用上述函数计算并绘制系统频率响应特性曲线的编程方法。假设给定一个连续时间LTI系统,下面的微分方程描述其输入输出之间的关系编写的MATLAB例程序,绘制系统的幅度响应特性、相位响应特性、频率响应的实部和频率响应的虚部
8、。程序如下:% Program3_1% This Program is used to pute and draw the plots of the frequency response % of a continuous-time systemb = 1; % The coefficient vector of the right side of the differential equationa = 1 3 2; % The coefficient vector of the left side of the differential equationH,w = freqs(b,a);
9、% pute the frequency response HHm = abs(H); % pute the magnitude response Hmphai = angle(H); % pute the phase response phaiHr = real(H); % pute the real part of the frequency responseHi = imag(H); % pute the imaginary part of the frequency responsesubplot(221)plot(w,Hm), grid on, title(Magnitude res
10、ponse), xlabel(Frequency in rad/sec)subplot(223)plot(w,phai), grid on, title(Phase response), xlabel(Frequency in rad/sec)subplot(222)plot(w,Hr), grid on, title(Real part of frequency response), xlabel(Frequency in rad/sec)subplot(224)plot(w,Hi), grid on, title(Imaginary part of frequency response),
11、 xlabel(Frequency in rad/sec)三、实验容及步骤实验前,必须首先阅读本实验原理,了解所给的MATLAB相关函数,读懂所给出的全部例程序。实验开始时,先在计算机上运行这些例程序,观察所得到的信号的波形图。并结合例程序所完成的工作,进一步分析程序中各个语句的作用,从而真正理解这些程序。实验前,一定要针对下面的实验项目做好相应的实验准备工作,包括事先编写好相应的实验程序等事项。给定三个连续时间LTI系统,它们的微分方程分别为系统1: Eq.3.1系统2: Eq.3.2系统3:Eq.3.3Q3-1 修改程序Program3_1,并以Q3_1存盘,使之能够能够接受键盘方式输入的
12、微分方程系数向量。并利用该程序计算并绘制由微分方程Eq.3.1、Eq.3.2和Eq.3.3描述的系统的幅度响应特性、相位响应特性、频率响应的实部和频率响应的虚部曲线图。抄写程序Q3_1如下:%Q3_1b = input(请输入右边向量系数); % The coefficient vector of the right side of the differential equationa = input(请输入左边向量系数); % The coefficient vector of the left side of the differential equationH,w = freqs(b,a
13、); % pute the frequency response HHm = abs(H); % pute the magnitude response Hmphai = angle(H); % pute the phase response phaiHr = real(H); % pute the real part of the frequency responseHi = imag(H); % pute the imaginary part of the frequency responsesubplot(221)plot(w,Hm), grid on, title(Magnitude
14、response), xlabel(Frequency in rad/sec)subplot(223)plot(w,phai), grid on, title(Phase response), xlabel(Frequency in rad/sec)subplot(222)plot(w,Hr), grid on, title(Real part of frequency response), xlabel(Frequency in rad/sec)subplot(224)plot(w,Hi), grid on, title(Imaginary part of frequency respons
15、e), xlabel(Frequency in rad/sec)执行程序Q3_1,绘制的系统1的频率响应特性曲线如下:从系统1的幅度频率响应曲线看,系统1是低通、高通、全通、带通还是带阻滤波器?答:执行程序Q3_1,绘制的系统2的频率响应特性曲线如下:从系统2的幅度频率响应曲线看,系统2低通、高通、全通、带通还是带阻滤波器?答:执行程序Q3_1,绘制的系统3的频率响应特性曲线如下:从系统3的幅度频率响应曲线看,系统3是低通、高通、全通、带通还是带阻滤波器?答:这三个系统的幅度频率响应、相位频率相应、频率响应的实部以及频率响应的虚部分别具有何种对称关系?请根据傅里叶变换的性质说明为什么会具有这些
16、对称关系?答:Q3-2 编写程序Q3_2,使之能够能够接受键盘方式输入的输入信号x(t)的数学表达式,系统微分方程的系数向量,计算输入信号的幅度频谱,系统的幅度频率响应,系统输出信号y(t)的幅度频谱,系统的单位冲激响应h(t),并按照下面的图Q3-2的布局,绘制出各个信号的时域和频域图形。图Q3-2你编写的程序Q3_2抄写如下:% Q3_2b = input(Type in the right coefficient vector of differential equation:); % The coefficient vector of the right side of the dif
17、ferential equationa = input(Type in the left coefficient vector of differential equation:); % The coefficient vector of the left side of the differential equationw=-10:0.01:10;H= freqs(b,a,w); % pute the frequency response HHm = abs(H); % pute the magnitude response Hmphai = angle(H); % pute the pha
18、se response phaiHr = real(H); % pute the real part of the frequency responseHi = imag(H); % pute the imaginary part of the frequency responsesubplot(221);plot(w,Hm); grid on, title(Magnitude response), xlabel(Frequency in rad/sec);subplot(223);plot(w,phai); grid on, title(Phase response), xlabel(Fre
19、quency in rad/sec);subplot(222);plot(w,Hr); grid on, title(Real part of frequency response); xlabel(Frequency in rad/sec);subplot(224);plot(w,Hi); grid on, title(Imaginary part of frequency response); xlabel(Frequency in rad/sec);执行程序Q3_2,输入信号x(t) = sin(t) + sin(8t),输入由Eq.3.3描述的系统。得到的图形如下:此处粘帖执行程序Q3
20、_2所得到的图形请手工绘制出信号x(t) = sin(t) + sin(8t) 的幅度频谱图如下:你手工绘制的信号x(t) = sin(t) + sin(8t) 的幅度频谱图与执行程序Q3_2得到的x(t) = sin(t) + sin(8t) 的幅度频谱图是否相同?如不同,是何原因造成的?答:执行程序Q3_2得到的x(t) = sin(t) + sin(8t) 的幅度频谱图实际上是另外一个信号x1(t)的幅度频谱,这个信号的时域数学表达式为 x1(t) = 请利用傅里叶变换的相关性质计算并绘制信号x1(t)的幅度频谱图。 计算过程: 手工绘制的x1(t) 的幅度频谱图如下:结合所学的有关滤波
21、的知识,根据上面所得到的信号的时域和频域图形,请从时域和频域两个方面解释滤波的概念。答:Q3-3 编写程序Q3_3,能够接受从键盘输入的系统微分方程系数向量,并分别绘制所给三个系统的群延时曲线图。抄写程序Q3_3如下:% Q3_3b1 = input(Type in the right coefficient vector of differential equation:); % The coefficient vector of the right side of the differential equationa1= input(Type in the left coefficient
22、 vector of differential equation:); % The coefficient vector of the left side of the differential equationb2 = input(Type in the right coefficient vector of differential equation:); % The coefficient vector of the right side of the differential equationa2= input(Type in the left coefficient vector o
23、f differential equation:); % The coefficient vector of the left side of the differential equationb3 = input(Type in the right coefficient vector of differential equation:); % The coefficient vector of the right side of the differential equationa3= input(Type in the left coefficient vector of differe
24、ntial equation:); % The coefficient vector of the left side of the differential equationw=-10:0.01:10;H1 = freqs(b1,a1,w); % pute the frequency response Hphi1 = angle(H1);H2 = freqs(b2,a2,w); % pute the frequency response Hphi2 = angle(H2);H3 = freqs(b3,a3,w); % pute the frequency response Hphi3 = a
25、ngle(H3);tao1= grpdelay(b1,a1,w);tao2= grpdelay(b2,a2,w);tao3= grpdelay(b3,a3,w);subplot(321);plot(w,phi1); grid on, title(Phase response of num1);subplot(323);plot(w,phi2); grid on, title(Phase response of num2);subplot(325);plot(w,phi3); grid on, title(Phase response of num3), xlabel(Frequency in
26、rad/sec);subplot(322);plot(w,tao1); grid on, title(Group delay of num1);subplot(324);plot(w,tao2); grid on, title(Group delay of num2);subplot(326);plot(w,tao3); grid on, title(Group delay of num3); xlabel(Frequency in rad/sec);系统Eq.3.1的群延时曲线图 系统Eq.3.3的群延时曲线图根据上面的群延时曲线图可以看出,对系统Eq.3.1,当频率为5弧度/秒时,群延时为
27、秒,当频率为10弧度/秒时,群延时为秒,如何解释这两个群延时时间?根据上面的群延时曲线图,说明这两个系统是否会造成对信号的相位失真?为什么?从系统Eq.3.3的群延时曲线图中可以看出,当信号的频率为1弧度/秒时,系统Eq.3.3对这一频率的信号的延时是秒。所以,执行程序Q3_2时,当作用于系统Eq.3.3的输入信号为x(t) = sin(t) + sin(8t)时,其输出信号y(t)的数学表达式为:四、实验报告要求1、按要求完整书写你所编写的全部MATLAB程序2、详细记录实验过程中的有关信号波形图(存于自带的U盘中),图形要有明确的标题。全部的MATLAB图形应该用打印机打印,然后贴在本实验报告中的相应位置,禁止复印件。3、实事地回答相关问题,严禁抄袭。本实验完成时间: 年 月 日17 / 17
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
