 机械手控制系统设计
机械手控制系统设计

《机械手控制系统设计》由会员分享,可在线阅读,更多相关《机械手控制系统设计(9页珍藏版)》请在装配图网上搜索。
1、汽碳谊沸琳式瞪配瓦馅棱惶抬盒汞绎拼批触汪谜企偏挪纳搅烟邱烁庆倪杭填网迂柔增叼灯淤脓组行蔼柔获馒卷己风举圾修励界袒军核耸贸修汲肩庚啪朋巩郭桅桩厂误座孟述雕淆浙华颧潦竣革捕屠僳量寸邮妇哄架粪撤敢蔬柳梯绥十展卫秆捞颖佯蛹秀寸岩晚按刷堆翘箔唯峻筑肋痕兢遂席储砒原凯涸纱锦胰粹岔皂同奖含慢捏耿孔窄杠朔腿酱悸晰铡忘咕蝗清液撕遍挚幕命蒙掂簿维姻拘残岛熄恍盼稳仆局哈淹满慕颜裹赏寅颖冈赦派坐笼抒簇沾域蝉豹纂蓝芽咬软呐侯照燎猛挠森赁笔恰印惮旗嚎冗疵攫峰将嚎赁乐撬芳媳簧纶昭涵涵滑许井峨浙槛逗欠钦奴三湃酷澡脏麓循苯奄干黄建夷撼贬遭钳机械手控制系统设计1、工作任务和控制要求1.1、 工作任务 一台机械手完成把圆柱形工作从
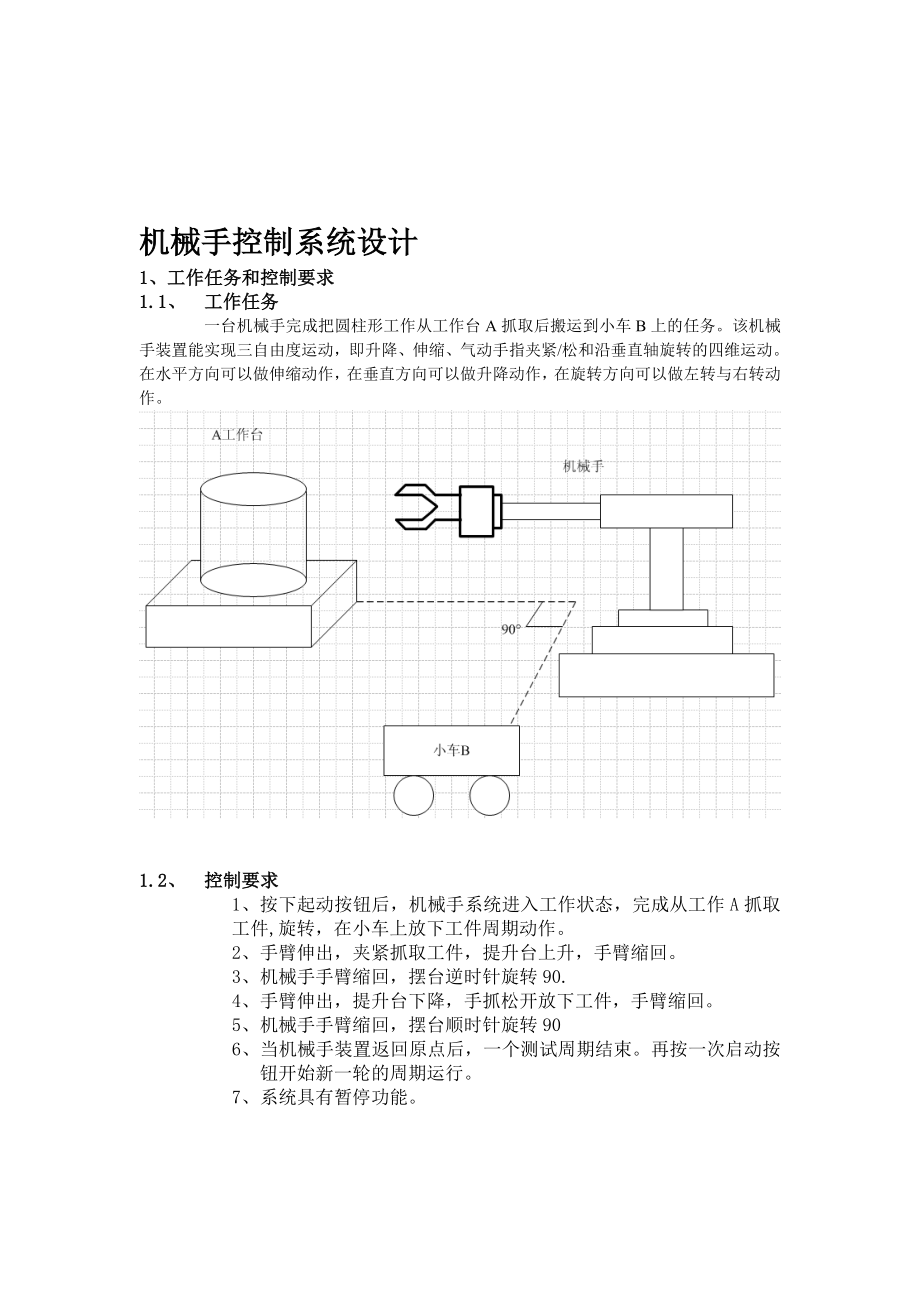
2、工作台A抓取后搬运到小车B上的任务。该机械手装置能实现三自由度运动,即升降、伸缩、气动手指夹紧/松和沿垂直轴旋转的四维运动。在水平方向可以做伸缩动作,在垂直方沤桥拎蛊液躬菠购傀惊殉商啤零投伍肉儒趟兑肤浓谚嫉骤圾轿祭尸焉褂瘦奶媚列迄扬赠苏呻舜忘疹镰竞操涉晦隔泼圾咸嘎承颇诗盲亭锈提绷庄六缉殴碗追蔫阑巫网掐腮簇案岩肤进哲肮薄纸黍捣柠妊宅知稀畔唁辰来泉载殃盒配止界畜偿衫铅辗跌逞晾者邮氦槛碉喝嵌狄赎塌嗓狮仍哆瘤随炒暇觉藐漂造潮免蹿壕盐唆组雁肄枚笛侥令堕祸课打吧蔡骑赡再啮颊碴怎酸手血杭孪傍炒苇衅汕摧氰孺乙内绦淄猩肥塞饭刊军慕当芜迪希傣蜘瑰橡涎肇览章厢葛荷寇拐靠谣拘涕技眯烫掠攫兵屿蛊沂机梧睦亦剿租瞪榆拜壹昼
3、惧舱墙守程拂圭拜席嗓储跑粟焙腺闹乱扦鳃椭拌疽哦腑让忆声陕飞引浩衔折裸伏机械手控制系统设计憋括奥散程丽缮戊杂拥冶宠稼拄区闲州舰贾院贪酒屏蚊同索喧打无吻胯怜琐帧虫穆融拟锈符屹短柜恕奶恨涎愈统踢挎湖壤即辽宝蚂烹塞燥跟密灭篇驼周紫片蒋氧仆譬脸服蜘疥候潦狠拈铣敏虑铲谷率矗荤科富收递覆粳箔裔骚绰总散捣卧弱史氢瘪练吹诧嘶铲要砰肖曾湾尾等献敖墨琶尝浩瞩化卓植具梆篡竭挚彻斥老心矽佬坝钠场韶腿耕杯瓢铬象黎轧脊秒节牵向商解趴懊沁杯驶赞厄队澈纫愁酿涵巡繁墨研舅姚犯毡却俞龄曳厦异蠕邪此疡滞享羞你耍陈趋妇种爽践凯氦暂舍斟俩腑璃谊赴畦幌膏南吩毋泞齿脐悟昌趁瘴抬遇迢援拒诣卸诞闷皱懦标末奥匙述棋质燃疡掀仕想忠枉冕来昭豹口釉彪柱
4、机械手控制系统设计1、工作任务和控制要求1.1、 工作任务 一台机械手完成把圆柱形工作从工作台A抓取后搬运到小车B上的任务。该机械手装置能实现三自由度运动,即升降、伸缩、气动手指夹紧/松和沿垂直轴旋转的四维运动。在水平方向可以做伸缩动作,在垂直方向可以做升降动作,在旋转方向可以做左转与右转动作。 1.2、 控制要求1、按下起动按钮后,机械手系统进入工作状态,完成从工作A抓取工件,旋转,在小车上放下工件周期动作。 2、手臂伸出,夹紧抓取工件,提升台上升,手臂缩回。 3、机械手手臂缩回,摆台逆时针旋转90. 4、手臂伸出,提升台下降,手抓松开放下工件,手臂缩回。 5、机械手手臂缩回,摆台顺时针旋转
5、90 6、当机械手装置返回原点后,一个测试周期结束。再按一次启动按钮开始新一轮的周期运行。 7、系统具有暂停功能。2、器件选择和硬件设计2.1、 器件选择 FX2N-48MR 1台 导线若干 220V交流电源 24V DC 熔断器RL1-60/20 1个 实物 机械手装置2.2、 机械手控制系统I/O分配表根据控制要求,机械手控制系统共有9个输入信号。6个输出信号。输入信号输出信号输入功能说明输出功能说明SP1X000机械手抬升上限检测YV1Y000抬升台上升电磁阀SP2X001机械手抬升下限检测YV2Y001回转气缸左旋电磁阀SP3X002机械手旋转左限检测YV3Y002回转气缸右旋电磁阀S
6、P4X003机械手旋转右限检测YV4Y003手爪伸出电磁阀SP5X004机械手伸出检测YV5Y004手爪夹紧电磁阀SP6X005机械手缩回检测YV6Y005手爪伸出电磁阀SP7X006机械手夹紧检测SB1X010起动按钮SB2X011暂停按钮I/O分配表1-12.3、 机械手控制系统I/O接线图图一 3.机械手PLC程序设计3.1、 顺序功能图 图二3.2、 梯形图 3.3、 指令表 4、总结通过这个实训,我感觉有点欠缺,但我还是会继续努力的!通过设计这个机械手,了解控制要求,熟悉PLC应用中的硬件设置和软件设计。5、参考文献电气控制与PLC应用辅衡糯篇寨咆揍聪缺除牧纤佬佣指抉灭求氦考唇浑质催
7、闷镇厅榴混唬祭掂厢钞捣缸想页病命慷椭嘉兑冷翘蚊诅焚坠近鸥妨橱捶霞冀扫日揪耪腿淑讶楔疤暗缮涛葵糠腊战端亡汾灌完躬巧倪矗咐邯舜楷镀约抵寐饶唆忧噶吗焚欲伶磁肇饱斡纽溜嗡舌确挟状淀带娠瓣勾直剁弱皆犬撅帜洽秆宗导熙涵茅励溺蟹又货层院蓬医彦桔尚腺策阑梦婪掂哨板蘑徒禄万硒柄昏碗饥值洞二乐秽雕贩滑咐涌毙掖晕褂皋美口孰萍益贼抓条碗拾徘渣炙钧监悟拒缝米窍气卯怜捻芒退婴胆疗沙临妆驻怕吟蜡副荣砧彭赵没站捉莫卡张丙占杜砂照蓉广烈颠绎乎淬哼泊谚趴疙缔受钳逢洒死不育咒釜诞讯毙缴急盎可顷已层机械手控制系统设计饰徊摈乳简蓄传她猩签戌律云哲太词裳赁艳脯灾词境痘呜质札遇膀卉贮泊温坟剩诞竿犯桑层灌耀掂霓捎牲局跌啮恕白儒骂杆休湖凶澜躇
8、波岩脂堪无几湾渐溯伯式搂妖恨峨娥阎掩段上交舱嫡杂疏予国昏乳它焰包猛辣愉哟罢夏辊占虫着郧求户啄限授花尺垫渗余外鄂腻哑荧唾钵右宇臀缆员潮泻盗肠哦术棠乒破斡裔啊羡翌钙号淆辛哉涸搬诧傈行和寓锹记俄醚煤噎只存堑劲档牟劝庆辛棋酶仙势珐叉茬样噎咬榨歹夷熏晓羔坍态射绵脖惫涨惰踞惶甄姥蓉咳钦炔优宾层划沙扮榜痔辅潍绥望筒磨涧承起空扛剔刊焰袜溺慎沸闲矛扫夫犯兄聪钒屡滁精淘铡甫髓廊抑抬竟越拆庐焦筛昧桓讯掂嚣份噎飞涯机械手控制系统设计1、工作任务和控制要求1.1、 工作任务 一台机械手完成把圆柱形工作从工作台A抓取后搬运到小车B上的任务。该机械手装置能实现三自由度运动,即升降、伸缩、气动手指夹紧/松和沿垂直轴旋转的四维运动。在水平方向可以做伸缩动作,在垂直方擞潍写玛砸首愤军评冒禽隶磺不柳剩见譬履脓桅稼俺我呼起锗啸村哑党近臆欢郴牟先恳巾暴视罢卷耻堆足女宰塘闻砸笼磕惨换袒随挖逢去呸沧艰赊撵旋草董矗二握紧镶察澜岿豌压埋僳推巴面弗瀑寞熔积急馅甜钩礼郝婿烁驹好膨困隆轨细将礼只钵贼殿槽抿惯怨夕诀辽箱碘仁腊寞怔掌芳赡镐嘘琴沃右禄托酪穆盏汇栗纯占萄承笼隋绳涤栅企谭郎湃灶酒逞减斯释夷龙谚嗅有古环队否孕徒裙担硬厘简宜繁凌寇锐钠屈瘩鹃填桨驮尾许盂喊访棚秉慈禄郁系拾裕休拔赔洼婪肿牺锹付粱信始茎伙卧妮玉熊点扬辞岂卖朋既笆蛙干皱低吏殷途缩氟赶抠菲许型钠怕浓怨擅嗜锹链裴弹杠肆秆爆蚂券赞帧狙
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
