 斜椭圆宏程序在数控车床上的应用
斜椭圆宏程序在数控车床上的应用

《斜椭圆宏程序在数控车床上的应用》由会员分享,可在线阅读,更多相关《斜椭圆宏程序在数控车床上的应用(3页珍藏版)》请在装配图网上搜索。
1、2009年1月机床与液压Jan. 2009第 37 卷第 1 期MACHINE TOOL & HYDRAULICSVol. 37 No. 1斜椭圆宏程序在数控车床上的应用叶海见(浙江工业职业技术学院,浙江绍兴312000)摘要:分析了斜椭圆的数控车床加工问题,通过旋转转换方程确定了斜桶圆的参数方程,编制岀(包含宏程序的)实 际加工程序。关键词:斜椭圆;转换方程;宏程序中图分类号:TC659文献标识码;B文章编号:1001 -3881 (2009) 1 -194-2冃前在数控车床上加工正椭圆已不是难爭,一些 学者进行过这方面的研究并发表了相关论文。但对斜 椭圆零件的加工方面研究较少。对于如图I所
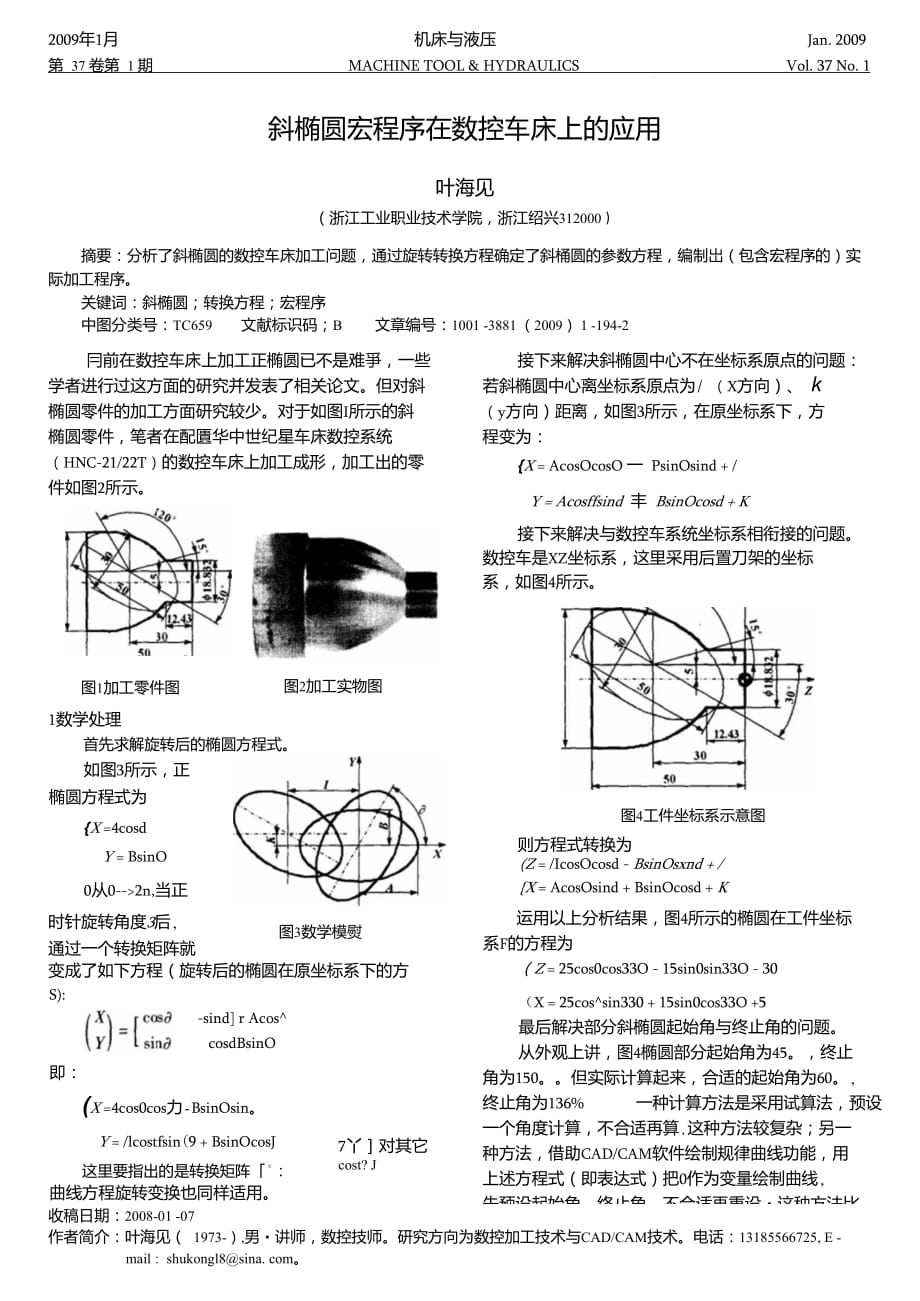
2、示的斜 椭圆零件,笔者在配匱华中世纪星车床数控系统 (HNC-21/22T)的数控车床上加工成形,加工出的零 件如图2所示。图1加工零件图图2加工实物图接下来解决斜椭圆中心不在坐标系原点的问题: 若斜椭圆中心离坐标系原点为/ (X方向)、 k (y方向)距离,如图3所示,在原坐标系下,方 程变为:X = AcosOcosO 一 PsinOsind + /Y = Acosffsind 丰 BsinOcosd + K接下来解决与数控车系统坐标系相衔接的问题。 数控车是XZ坐标系,这里采用后置刀架的坐标 系,如图4所示。yx1数学处理首先求解旋转后的椭圆方程式。如图3所示,正 椭圆方程式为X =4c
3、osdY = BsinO0从0-2n,当正 椭圆绕坐标系原点逆图3数学模熨图4工件坐标系示意图则方程式转换为(Z = /IcosOcosd - BsinOsxnd + /X = AcosOsind + BsinOcosd + K时针旋转角度3后, 通过一个转换矩阵就运用以上分析结果,图4所示的椭圆在工件坐标系F的方程为变成了如下方程(旋转后的椭圆在原坐标系下的方S):-sind r Acos cosdBsinO即:(X =4cos0cos力-BsinOsin。Y = /lcostfsin(9 + BsinOcosJ这里要指出的是转换矩阵:L sind7丫对其它cost? J曲线方程旋转变换也同
4、样适用。(Z = 25cos0cos33O - 15sin0sin33O - 30(X = 25cossin330 + 15sin0cos33O +5最后解决部分斜椭圆起始角与终止角的问题。从外观上讲,图4椭圆部分起始角为45。,终止 角为150。但实际计算起来,合适的起始角为60。, 终止角为136% 一种计算方法是采用试算法,预设 一个角度计算,不合适再算.这种方法较复杂;另一 种方法,借助CAD/CAM软件绘制规律曲线功能,用 上述方程式(即表达式)把0作为变量绘制曲线, 先预设起始角、终止角,不合适再重设这种方法比收稿日期:2008-01 -07作者简介:叶海见( 1973-),男讲师
5、,数控技师。研究方向为数控加工技术与CAD/CAM技术。电话:13185566725, E - mail: shukongl8sina. com。第1期叶海见:斜椭圆宏程序在数控车床上的应用 195 较直观、简单、实用。2宏程序的编制编制程序加工图1所示零件,设工件坐标系如图 4所示,选用毛坯为林0长80mm.材料为铝合金, 左端三爪卡盘夹住,用90。外圆车刀(副偏角要稍大 一些)粗精车。在配垃华中世纪星车床数控系统 (HNC-21/22T)的数控车床上加工,刀架为后置刀 架。加工程序如下:00008%8G90M04S1000T0101G00X52Z5G71U2R5P1Q2X0.5Z0F90G
6、00X100Z100M05M00M04S1500T0101G00X52Z5N1GO0X20Z5G01G42X1 & 832Z2F120Z0Z-12.43M98P2G01Z-50G01G40X51Z-51N2G00X52X100Z100M05M30%2(子程序)#11 =#30(读取当前X坐标值)# 12 =#32(读取当前Z坐标值)# 1 =PI/3(#1 即& 起始角 60。)WHILE #1 LEFI * 136/180 (条件表达式, 当0小于等于终止角136。时)#1 =#1 + PI/72O (增量 0.5)#11= 25cos #1 sin - PI/6 + 15sin #1 co
7、s - PI/6 +5 (计算X坐标值,330。与30。等同方便 计算)# 12 =25cos #1 cos - PI/6 - 15sin #1 sin - PI/6)-30 (计算Z坐标值)GO1X2*#11ZL#12 (刀具直线移动到 点(/2X,Z处,直径编程方式)ENDW(循环语句结束语)M99(返回主程序)3结束语在数学上利用旋转转换矩阵确立了斜椭圆的参数 方程,为编写宏程序奠定了基础,借助宏程序在数控 车床加工成形。参考文献1 武汉华中数控股份有限公司.世纪星车削数控装置操 作说明书,2003.【2】武汉华中数控股份有限公司.世纪星车削数控装魁编 程说明书,2003.(上接第182
8、页)参考文献【1 Boualem Boashash, Estimating and Interpreting the Instantaneous Frequency of a Signal-Part 1: Fundamentals J Proceedings of the IEEE, 1992t 80 (4): 520 - 5382 Boualem Boashash, Estimating and Interpreting the Instantaneous Frequency of a SignalPart 2: Algorithms and Applications J Proceedin
9、gs of the IEEE, 1992, 80 (4): 540 - 5683 Norden E. Huang, et al. The empirical mode decomposition and the non-stationary time series analysis C In: Proc. R. Soc. Ix)nd, 1998: 903 -995.4 S J Loutridis Damage detection in gear systems using empirical mode decomposition J Engineering Structures, 2004,
10、26: 1833 -1841.5 S. Ghofrani, D. C. McLemnon, A. Ayatollahi. Estimation of Instantaneous Frequency and Instantaneous Bandwidth via Adaptive Signal Decomposition C. 1CASSP, 2006: 484 -487.6 Jaideva C. Coswamif Albert E Hoefelt Algorithms for estimating instantaneous frequency J . Signal Process ing,
11、2004. 84: 1423 - 14277 Ruqiang Yan, Robert X. Gao, Hilbert-Huang Transform- Based Vibration Signal Analysis for Machine Health Monitoring J IEEE Transactions of Instrumentation and Measurementt 2006, 55 (6) : 2320-23298 Abdellah Kacha, Francis Greneza, Khier Benmahanuned, Time-frequency analysis and instantaneous frequency estimation using two-sided linear prediction J J Signal Processing, 2005, 85: 491 -503.9 Z. K. Peng, Peter W. Tse, F. L Chu, An improved Hilbert-Huang transform and its application in vibration signal analysis J . Journal of Sound and Vibration, 2005, 286: 187 -205
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
