《自写-六旋翼无人机发明实用新型专利撰写范例汇总》由会员分享,可在线阅读,更多相关《自写-六旋翼无人机发明实用新型专利撰写范例汇总(6页珍藏版)》请在装配图网上搜索。
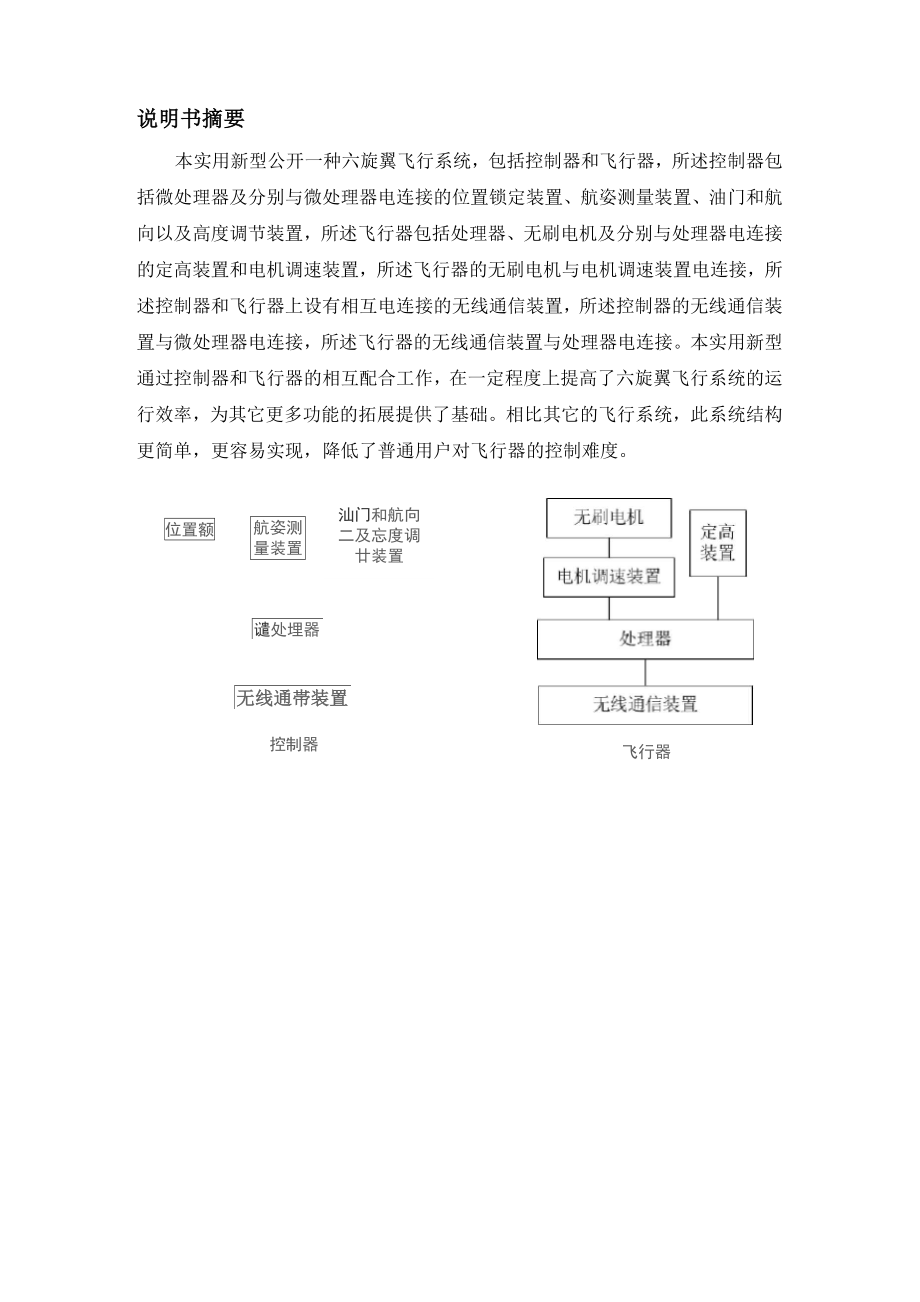
1、飞行器位置额航姿测量装置汕门和航向二及忘度调廿装置谴处埋器无线通帯装置说明书摘要本实用新型公开一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包 括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航 向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接 的定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所 述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装 置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。本实用新型 通过控制器和飞行器的相互配合工作,在一定程度上提高了六旋翼飞行系统的运 行效率,为其它更多功
2、能的拓展提供了基础。相比其它的飞行系统,此系统结构 更简单,更容易实现,降低了普通用户对飞行器的控制难度。控制器权利要求书1. 一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及 分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调 节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和 电机调速装置,其特征在于,所述控制器和飞行器上设有相互电连接的无线通信 装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装 置与处理器电连接,所述飞行器的无刷电机与电机调速装置电连接。2. 根据权利要求1所述的一种六旋翼飞行系统,其特征在于,
3、所述位置锁定 装置包括陀螺仪、加速度计和全球卫星定位系统(GPS )电路模块。3. 根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量 装置包括陀螺仪、加速度计、电子磁场计和温度传感器。4. 根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量 装置为三轴加速度陀螺仪传感器。5. 根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述定高装置 包括超声波传感器和气压计传感器。说明书一种六旋翼飞行系统技术领域本实用新型涉及飞行器控制技术领域,具体涉及一种六旋翼飞行系统。背景技术在二十世纪初就出现的多旋翼飞行器拥有体积小、结构紧凑和可垂直起降的 特点,被广泛应用于军事、
4、警备和工农业生产等领域。其中,以结构简单和成本 低廉的四旋翼飞行器居多,但四旋翼飞行器载重低,滞空时间短,容错性不强。 相对于四旋翼飞行器,六旋翼飞行器多了两个电机,在自重提升不大的前提下, 升力提升明显,并且通过各电机的调整,可达到较佳的容错控制效果。由于成本 高、控制策略复杂和续航时间短等缺点,六旋翼飞行器的发展和普及应用速度缓 慢。近年来,随着新型材料、微机电(MEMS)、微惯导(MIMU)以及飞行控制等 技术的发展,六旋翼飞行器的制造成本大为降低,其自适应飞行能力得到长足进 步。通过各种算法和数学模型可以灵活控制六个旋翼的旋转,实现垂直起降、定 点悬停、旋转、侧飞、倒飞等功能。六旋翼飞
5、行器凭借载重能力强、可控度高、 动作灵活以及容错性能好等优点成为国内外炙热的研究热点和技术攻关领域。六旋翼飞行器控制研究的理论成果不少,但大多设计复杂,系统难以实现, 对于普通用户而言难以实施操作。实用新型内容本实用新型的目的是解决现有技术的缺陷,提供一种结构简单,容易实现和 操作的六旋翼飞行系统,采用的技术方案如下:一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分 别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节 装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电 机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述控制器和飞
6、行 器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电 连接,所述飞行器的无线通信装置与处理器电连接。位置锁定装置实时采集陀螺仪、加速度计和全球卫星定位系统的数据信号, 利用扩展卡尔曼滤波(EKF)算法测算飞行器所处的空间坐标,并于用户期望的 悬停位置相比较,通过数字PID算法锁定空间位置。航姿测量装置实时检测控制器的姿态、作业环境温度和磁场信息,并发送给 微处理器,微处理器首先利用温度信息对陀螺仪输出数据进行实时温度漂移补 偿,然后利用磁场信息对陀螺仪输出数据进行实时校准,最后利用四元素融合算 法对姿态数据进行处理,得出可以控制驱动电机的欧拉角(即横滚角(4、俯 仰角(屮
7、)和航向角();通过油门和航向以及高度调节装置设定飞行器的 油门值、航向角和高度值,并发送至微处理器;微处理器将处理后的姿态数据、 油门值、航向角和高度值打包并通过无线通信装置发送至飞行器,飞行器接收控 制器发送过来的数据同时,读取其自身的电子磁场计和定高装置采集的数据,交 由处理器通过互补滤波融合和姿态解耦运算等算法解算出六路PWM值,分别输 出六个通道的脉宽调制信号至电机调速装置,由电机调速装置驱动电机完成飞行 器的平衡控制以及横滚、俯仰、偏航等空间六自由度的动作,实现在X、Y和Z 方向上的平稳运动。本实用新型利用无线通信装置传输数据,将控制器和飞行器 联系在一起,使得控制控制器的姿态就相
8、当于控制飞行器的姿态。控制器和飞行 器分工合作,控制器负责姿态数据的收集、处理和数值的设定,而飞行器负责把 接收的数据与其自身采集的数据进行融合运算再处理,发出六通道控制信号,完 成既定的目标姿态运动。本实用新型在一定程度上减轻了飞行器的负担,提高了 整个飞行系统的运行效率,为其它更多功能的拓展提供了基础。相比其它的飞行 系统,此系统结构更简单,更容易实现,降低了普通用户对飞行器的控制难度。作为优选,所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统 (GPS)电路模块。作为优选,所述定高装置包括超声波传感器和气压计传感器。本实用新型中,飞行器在低空飞行时,采用超声波传感器进行定高,在高空
9、 飞行时,采用气压传感器进行定高。作为优选,所述航姿测量装置包括陀螺仪、加速度计、电子磁场计和温度传 感器。作为优选,所述航姿测量装置为三轴加速度陀螺仪传感器。三轴加速度陀螺仪传感器分别采集控制器在X、Y、Z轴上的加速度以及控 制器绕三轴旋转的角速度,发送给微处理器,经过温度补偿和磁场校准后进行姿 态估计,采集互补滤波融合的数据并使用四元数法进行姿态解算,得到我们想要 的欧拉角。本实用新型的有益效果:通过控制器和飞行器的分工合作,在一定程度上减 轻了飞行器的负担,提高了系统的运行效率,增强了人机交互性,降低了用户的 操作难度。相比其它的飞行系统,此系统结构更简单,更容易实现。 附图说明图1是本
10、实用新型的系统结构示意图。具体实施方式下面结合附图和实施例对本实用新型作进一步详细描述。实施例:如图1 所示,一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括 微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向 以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的 定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述 控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置 与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统(GPS)电路 模块。所述定高装置
11、包括超声波传感器和气压计传感器。 所述航姿测量装置为三轴加速度陀螺仪传感器。本实施例工作过程:三轴加速度陀螺仪传感器分别采集控制器在X、Y、Z轴 上的加速度以及控制器绕三轴旋转的角速度,发送给微处理器,经过温度补偿和 磁场校准后进行姿态估计,采用互补滤波融合数据并使用四元数法进行姿态解 算,得出可以控制驱动电机的欧拉角(即横滚角(G)、俯仰角(屮)和航向角(0), 通过油门和航向以及高度调节装置设定飞行器的油门值、航向角和高度值,并发 送至微处理器;微处理器将处理后的姿态数据、油门值、航向角和高度值打包并 通过无线通信装置发送至飞行器,飞行器接收控制器发送过来的数据同时,读取 其自身的电子磁场计和定高装置采集的数据,交由处理器通过互补滤波融合和姿态解耦运算等算法解算出六路PWM值,分别输出六个通道的脉宽调制信号至电 机调速装置,由电机调速装置驱动电机完成飞行器的平衡控制以及横滚、俯仰、 偏航等空间六自由度的动作,实现在X、Y和Z方向上的平稳运动。说明书附图飞行器控制器
 自写-六旋翼无人机发明实用新型专利撰写范例汇总
自写-六旋翼无人机发明实用新型专利撰写范例汇总