 防轴向位移焊接滚轮架控制系统的设计与研究
防轴向位移焊接滚轮架控制系统的设计与研究

《防轴向位移焊接滚轮架控制系统的设计与研究》由会员分享,可在线阅读,更多相关《防轴向位移焊接滚轮架控制系统的设计与研究(4页珍藏版)》请在装配图网上搜索。
1、第 9卷第 6 期 1 9 9 9年 l 2月 长春大学学报 J OURNAL OF CHANGCI-I UN UNI VER SI T V0 l 9 No 6 De e 1 9 9 9 7 7 J 7 防轴向位移焊接滚轮架控制系统的设计与研究 李佳 慧-付全 王(1 鞍山机电工业学校,鞍山l 1 4 0 0 3;2 榆次液压件厂 榆次0 3 0 6 0 0 3 长春大学 机械工程学院 长春1 3 0 0 2 2)摘 要:筒 进 防 轴 向 位 秽 焊 接 滚 轮 操 作 架 控 制 系 统 的 硬 件 1 控制系统的组成及特点 构成及特点,产生和控te l 轴向位移 的机 理,着重推 导了控
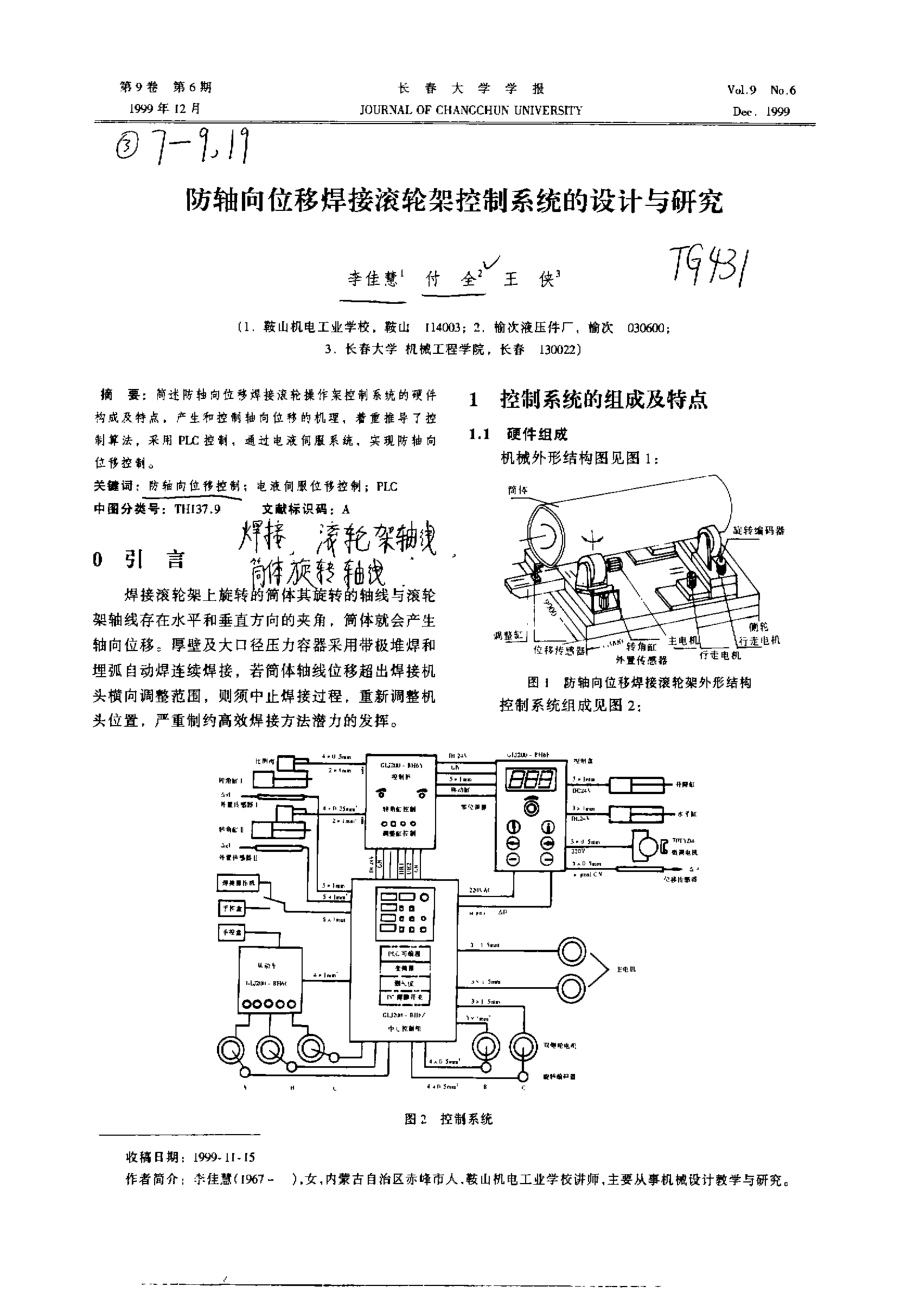
2、 制算法采用 P L C控 l,通过电液伺服系坑实现防轴向 1 1 硬件组 成 位移控 l。机械外形结 构图见 图 1:关键 词:防轴向位移控制 中圈分类号:1 1 t 1 3 7 9 O 电液伺服位移控制;P L C 文献标识码:A 托 釉 釉茂 的轴线与滚轮 架轴线存在水平和垂直方向的夹角筒体就会产生 轴向位移。厚壁及大口径压力容器采用带极堆焊和 埋弧 自动焊连续焊接,若简体轴线位移超出焊接机 头横 向调整 范围,则须中止焊接过程 重新 调整 机 头位置 严 重制约高 效焊 接方法潜力的发挥。图 I 骑轴向位移焊接滚轮架外形结构 控制 系统组 成见图 2:图 2 控 6 l 系统 收稿 日
3、期:1 9 9 9 1 1 巧 作者简介 佳慧(1 9 6 7 一 ),女,内蒙古 自治区赤 峰市人,鞍 山机电工业学杖讲师,主要从事机械 设计教学与研究。长春大学学报 第 9卷 1 2 设计特 点简介 该设备是典型的机 电 液一体化产品。由于采 用 P I C进 行 系 统 控 制,加 以 液 压 伺 服装 置 执行,构 成大闭环 系统,P L C软件 中设有 位移传感 器动作 超 限、支撑 中心 角超限、切断变频器输 出功能 保 护人机 安 全,且程 序 修改容 易 调试 方便 联 机、脱机 均可控制。2 控制系统设计 2 1 产 生及控 制轴 向位 移的机理 简体因直线度、椭圆度或其它因
4、素造成简体旋 转轴线 0 一 0 与滚轮架轴线 r j 一0产生水平和垂 直方向 的偏斜 在水 平面投影 角 n,在垂直 面投 影 角 ,在旋 转过 程 中产生 轴 向位 移 即作螺 旋 运动。当简体向下产生轴向位移,位移传感器检测藩 号,通 过 P L C控制 的 电液伺 服 系统控 制滚 轮在 水平方向反螺旋偏 转 角。此时筒体在摩擦 力 F 的分力 F。的作用下,开始向上移动,使简体位置 回复到 0位,最终摩擦力与螺旋运动力达到平衡。如果回复过零,位移传感器再次检测出信号,使滚 轮顺螺旋方向偏转。经多次反复上述运动,始终保 诗简体在动态过程中位移控制在工艺允许范围内,从而完成轴 向位移控
5、制。防轴 向位移 机理示意 如图 3:图 3防轴向位移机 理示意图 2 2 防轴 向位移控 制方式 为 了达到设计要求 的位移控制精度 指标,在动 态控制范 围 内,确定合 理的控制 方法,选择合 理的 取样周期 和推 导正确 的控 制算 法是防轴 向位移控 制 的 核 心。简体旋转一圈行走一周长 中 ,所 用焊接时间 t,轴向位移不允许超 2 ra m,相当于简体轴向位移 量与周 长的行 走 轨迹 临 界斜 率 地=4 中 ,在 旋 转 过程 中,每个取样周 期 r取一 次 位移 量 j ,焊 接 速 度 I ,行走距离 S(S=V hr),其运转行走轨迹斜 率 A X S若大于 4 1 中
6、 就应调整一次滚轮转角斜率,定义为相对位移斜率=每次调整量令行走轨迹斜率 与滚轮转lf 自 斜率相同 即可抵消位移。由于工件阻 力不同,调整后行走轨迹斜率可能往负方向走,只要 斜率小于临界斜率就不调整。另一种情况是行走轨 迹斜率一直小于临界斜率,但位移超 出原点某设定 篮也应稠整,定义 为 绝对 位移 稠整。每 次调整 量 仍 为行走轨迹斜率与滚轮转角斜率相同,筒提位移过程的行走轨迹示意如图 4 所示:图4 简体位移过程行走轨迹示意田 2 3 确定调 整阈值 轴向位移精度控制在 2 ra m之内,稠整时机 不能选在位移量和行走轨迹的临界点。设计中取临 界值的一半为调整闯值。产生位移时,当绝对位
7、移 量阈值 l m l l r m n或相对位移斜率 阈值 时,则应调 整滚 轮转角。2 4 确定取样周期 为 了使 调整 既及时又不过 于频繁,合理选 择取 样周期是十分必要 的。根据位移传感器分辨率 0 1 m m,假设较为苛刻 的条件下筒提位移 2 5 ra m 圈,则 取样次数N=2 5 0 1=2 5 0 取样周期r=N=2 5 防轴 向位 移控制算 法 由图4筒庠轴 向位移与周长的行走轨迹斜率 K=2*X S,由图 3可知滚轮转角轴 向斜 率 K l=一 A X 1 1 0 5 0+r 依据防轴向位移控制机理,令 K=1,确定 的两种控制算 法如下:第 6期 李佳慧等:防轴向位移焊
8、接藏轮架控翩系统的设计与研究 当位移 j A Xl _1时,行走距离 S=n X t】,则 进行运算 输 出给定 电压,完 成位 移 电压 设 定:一 一一 再经比例运算和脉冲控制算法输出参考电压 肼 控 吼 t l 1 0 5 0+r 制电液伺服系统执行转角缸位移。外置传感 器将 实 l:(1)际位 穆 反馈 量 输 入到 tt较 环节 与 给定 电压 当 在 一 个 采 样 周 期 ,s;,则 篙 角 控 制 系 统 框 图 如 图 其 等 敬 一 一 珏 r l 0 5 0+r ,S XI:1 6 5 0一AX (2)珏:焊接 速度 m s r:取 样周期 s 2 6 确 定电液伺服位置
9、控 制算法 电液伺服位置控制系统简化为无阻尼的静态系 统。伺服液压缸单位流量位移 0 1 2 7 m m t m 比例 阔流量 P=3 0 b a r 时口=7 5 m i l s 比例放大器=0 1 q=0 9 5 m m t s v (3)位移传感器 A U=0 2 (4)外置传感 器 l=0 1 3 X1 (5)令 Ug:U (3)(5)则:r=l 0 5 (6)将(4)、(6)代人(1)、(2)式则 J l=0 95 x 8 2 5 x 1 0一5 A U (7)川=号等(8)2 7 脉 冲控制算 法 因结构 关 系电液 伺服 位置控 制参 考 电压 常 在工作零位附近(本结构采用高频
10、响比例方 向阀)即本结构 比例控翩器电源在工 作的任何过程均带 电,使其响应快,无冲击现象发生,该系统将对输 入信号中很小的阶跃变化做出反应。其输出特性的 形状是个指 数 曲线,它一开始很陡地上升(高 速),但逐渐平缓下来(降低速度)。即随着输 出接近指 令位置误差信号变小,因而阀的驱动信号减小。开 启电压与开启时问的乘积小,为减少由于机械摩擦 等因素造成的系统盲区,使位移偏差在小信号能快 速定位,采用脉冲控制法 2 8 电液伺服 闭环控制 系统 利用 P L C内部的 P】D控制回路,取伺服缸位置 传感器信号对系统进行闭环控制。为提高控制精度提高信噪比,插入一级增益。筒体轴向位移量 A X由
11、位移传感器转换为位移 电压 ,输 入到 P L C,根据防轴向位移控制算法 垒 H!H 可 j 圄 5 滚轮转 角控翩系统框图 固 匿 6 滚轮转角控翩等效圈 3 调试小结 实际测试结果见下表。表 1实际 甜 试 表 nl l|m m r a m ,r a m V 计算 值 宴测值 O l 0 0I 9 6 8 6 7 2 0 o 0 8 3 0 2 0 0 3 9 】3 3 7 I 3 O 1 0 0 1 9 I 4 7 I 5 9 O 0O 8 1 4 O 2 0 03 9 3 o 2 3 测试结果 A X 与理论计算值基本相符,满足 控制功能要求。目前该设备 已通过验收,交付使 用,运转
12、 良好。2 3 参考文献 雷 天觉 液压工程手册 M:北 京:机械 工业 出版 社、I 9 9 0 田锡唐 焊接手册(第 三卷)M 北京 机 械工 业出版杜 I 9 9 2 A 7 0 S(意大利)公司 液压 伺服拄术 的应用 投设 计 指南 M 1 9 9 7 (下转 第 1 9 页)翅 第 6期 鲍永刚:M I S 操作 授权问题探讨 9 全,可以对上述数据库表进行适当加密处理。所有 用户枨号保存于 j h u s e m中,如果给定用户身份为 基层编制人员、基层审批人员或厂级审核人员,则 需获得相应操作授权。如果用户是基层编制人员或 基层 审批人 员,则其授权信息保存 在 h s q表
13、中,如果用户是厂级审核员,则其授权信息保存在 i h e s 中。用户在进入 M I S系统开始实际操作之前,先输 入用户名和口令,系统依据 j h s q 和 i h e s 中的授权信 息确定用户的操作权限,如果相应用户无权操作,则 自动退出系统,从而有效地保证系坑的安全。计划员、考核员和统计员的权限是确定的,他 们通过专用程序操作,权限审核时只要依据 i h u s e r s 信息确认其身份即可确定他是否有权执行相应程序 模块。我们基于上述设计思想实现了一个 M I S操作授 权管理模 块,试用表 明,这种方法 是可行 的、有效 的和方便 的。C 2 J 参考文献 萨师 煊、王 珊数
14、据库 系统 概论 第二 版 M 北 京:高 等 教 育 出版 杜,1 9 9 1 I S B N 7-0 4 0 0 3 1 7 9 5 T P 7 4 康博创 作室编,M i c r o s o f t S Q L S e e r 系统管理员新起 点 一 7 0实用 教程 M 北京:机械 工业 出版 社 I 9 9 9 5】BN 7 1 l J 一 0 70 7 9 8 TP J 0I 8 A d i s c u s s i o n a b o u t MI S o p e r a t i n g a u t h o r i z a t i o n BA O Y o n g-g a n g
15、Co mp u r En g i n e e r i n g D e p a r t me n t,C h a n g e h u n U n i v e r s i t y,Ch a n g c h u n 1 3 0 0 2 2 AbaC a a c t:Th e P r o b l e ms o f o p e r a ti n g a u t ho riz a tio n c o n t r o l o f di ff e r e n t u s e ,f,i nt h e MI Sof e n t e r p r i s e s a r e d l s eu s r,e di nt
16、h i s p a pe r An a p p r o a c h b a s e d o t l t he o p e rat i n g a u t h o r i z a t i o n 0 f the d R t R b a s e a c c o u n t n u mb e r ma n a g e me n t i s p r o p o s e dAf t e r p u t ti n g t h i s a p p r o a c h i n t o p r a c t i c e w。f o u n d i l w o r ka b l e a n d pr a c t i
17、 c a b l e Ke y wo r d s:M1 S;d a t a b a s e;D B MS;d a t a b a s e s e c t t r J l y (上接第 9页)De s i g n a n d s t u d y o f c o n t r o l s y s t e m f o r we l d i n g r o l l e r f r a me a g a i n s t a x i a l d i s p l a c e me n t L l j i 旺-h u An s b a n Me c h a n i c a l a n d E l e e t r
18、 o I n d u s t r y I n s t i t u t e,An s h a n 1 1 4 0 0 3 F U Q u a rt Yu e i Hy a a u l i e s 1 7 1 a n t Y【l c i 0 3 0 6 0 0 WANG Xi a Me c h a n i c a l E n g i n e e ri n g C o l l e g e,C h a n g c h u n Un i v e r s|t y,C h a n g c h u n 1 3 0 0 2 2 Abs t r ac t T h i s pe peb ile ny d es c
19、r i b e s l ife h l l lF d wa z c o mp o n e n t a n d I B【u r e o f l ife c t rol s y s t e m f o r the wdn g r o l l e r f r a me a g a i n s t l ife a x i a l d i e m e m a n d r L s o il g f o r p r o d u c i n g a x i a l s p l t T he c o n t r o l al g o r i t h m is c h i e fl y d e ri v e d
20、E n 山ri ng P L C c o n t r o l,w e re al i z e c o l l t r o l o f p r e v e n ti n g a x i a l d J s p k q c e n len t b y l ife de e t r o-h y d r a d i e E,e t 3 o s y s l e m Ke y ;c o n t r o l of P v e n t i r I g i d J s p la o e me a t;e l e c t r o-h y d r a u l i c s e d i hc e m e n l e o n t w d
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 新北师大版四年级数学下册《整理与复习》课件-(2)
- 《三、知之为知之不知为不知 课件》高中语文人教版选修 先秦诸子选读33764
- 《〈论语〉选读》之《诲人不倦》课件3
- 新北师大版八年级下册5.1认识分式.ppt
- 新北师大版八年级下册4.2提公因式法(2)
- 新北师大版包装四年级数学下册PPT课件
- 新北师大版六下《变化的量》4.1
- 《三角形的面积课件》小学数学北师大版五年级上册325
- 新北师大版六数下册《总复习》(63-67页)
- 新北师大版四年级数学下册《买文具》课件
- 新北师大版六数总复习《解决问题的策略》(108-109页)
- 新北师大版四年级下册《三角形边的关系》ppt课件
- 新北师大版六年级数学下册《练习三》
- 《七、总复习——图形与几何——平面图形的认识课件》小学数学苏教版六年级下册5903
- 新北师大版二年级下册数学《辨认方向》上课用
