 MATLAB语言与控制系统仿真
MATLAB语言与控制系统仿真

《MATLAB语言与控制系统仿真》由会员分享,可在线阅读,更多相关《MATLAB语言与控制系统仿真(19页珍藏版)》请在装配图网上搜索。
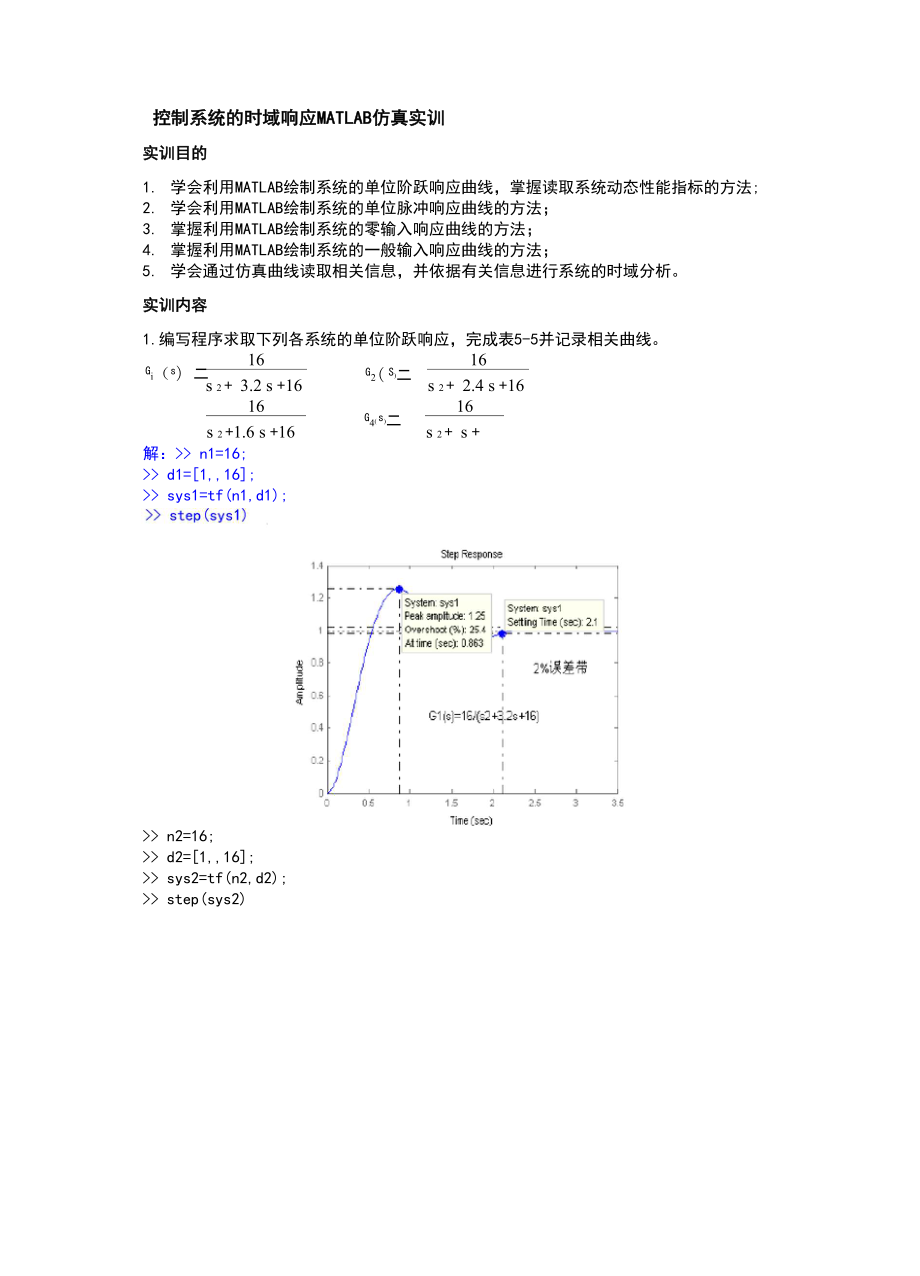
1、控制系统的时域响应MATLAB仿真实训实训目的1. 学会利用MATLAB绘制系统的单位阶跃响应曲线,掌握读取系统动态性能指标的方法;2. 学会利用MATLAB绘制系统的单位脉冲响应曲线的方法;3. 掌握利用MATLAB绘制系统的零输入响应曲线的方法;4. 掌握利用MATLAB绘制系统的一般输入响应曲线的方法;5. 学会通过仿真曲线读取相关信息,并依据有关信息进行系统的时域分析。实训内容1.编写程序求取下列各系统的单位阶跃响应,完成表5-5并记录相关曲线。Gi(s)二16s 2 + 3.2 s +16G2( S)二16s 2 + 2.4 s +1616s 2 +1.6 s +16G4( s)二1
2、6s 2 + s + 16解: n1=16; d1=1,16; sys1=tf(n1,d1); n2=16; d2=1,16; sys2=tf(n2,d2); step(sys2) n3=16; d3=1,16; sys3=tf(n3,d3) step(sys3) n4=16; d4=1,1,16; sys4=tf(n4,d4) step(sys4)1 A 111i/ 1 SyiBm:孕21 Pdska呻HucteHH.| CiTwd 脚 372systeiTL srs2f j Jlitirre(2Ecja8-JL _|L L._k右帥 mg nne fsecj 2.&1; -II-G2i;p
3、1B2+2Jg+16)-IIII./i1t/i l ii一 i11 _1111 IlliStep Reaponss0511.522.535544.5Tima (sec)Step Resnoree1Tine (sec) z1=;w=4;cmax1=1+exp(-z1*pi/sqrt(1-z1入2);tp1= pi/(w*sqr t(1-z1入2);ts1=(z1*w);cmax1,tp1,ts1ans = z2=;w=4;cmax2=1+exp(-z2*pi/sqrt(1-z2入2);tp2=pi/(w*sqr t(1-z2入2);ts2=(z2*w);cmax2,tp2,ts2ans = z3
4、=;w=4;cmax3=1+exp(-z3*pi/sqrt(1-z3入2); tp3二pi/(w*sqr t(1-z3入2);ts3=(z3*w);cmax3,tp3,ts3ans = z4=;w=4;cmax4=1+exp(-z4*pi/sqrt(1-z4入2); tp4=pi/(w*sqr t(1-z4入2);ts4=(z4*w);cmax4,tp4,ts4ans =nn说明:对于二阶欠阻尼系统(0E n1=8; d1=1,2,8; sys1=tf(n1,d1); impulse(sysl)IrrpUse Response2.111I iiii31:156TIidb (.sec) n2=1
5、0; d2=1,2,10; d3=1,2,12; sys3=tf(n3,d3); impulse(sys3) d4=1,2,16; sys4=tf(n4,d4);表5-63.已知某单位负反馈系统的开环传递函数为G (s)=5s( s + l)(O.ls +1)若系统的输入信号分别为(1) U = t,t g (0,20)(2) e -o.5t,tg(0,20)2(3) u = sin(2t)e-o.5t , t g (0,20)3(4) u = cos(2t)e-3t, t g (0,20)4 编写程序分别求取系统的在给定的输入信号下的响应,记录相应的曲线。 n=5; d=conv(1,1,0
6、,1); nc,dc=cloop(n,d) sysc=tf(nc,dc); t=0:20; u1=t; u2=t.*exp*t); u3=sin(2*t).*exp*t); u4=cos(2*t).*exp(-3*t);subplot(221);lsim(sysc,u1,t);subplot(222);lsim(sysc,u2,t);subplot(223);lsim(sys4编写程序绘制以下系统的单位阶跃响应曲线和单位脉冲响应曲线。(1) x=-1-4丁x + u1y = t) 3.5很 + 6u a1=-1,0;0,-4; b1=1;1; c1=0,; d1=6; sys1=ss(a1,b
7、1,c1,d1); subplot(1,2,1);step(sys1);subplot(1,2,2);impulse(sys1);2 4381 2_0 3152 1x +2 1464 33 5 - 5 93 7(2) X=u a2=2,4,3,8;0,3,1,5;2,1,4,6;3,5,-5,9; b2=1,2;2,1;4,3;3,7; c2=1,0,3,2;3,1,5,0; d2=0; sys2=ss(a2,b2,c2,d2); step(sys2)Step ResponseFrom. ln(l jFrom: ln(2jlllp-p-cl _=-=!Dlnohl_u _u80100.05LI
8、.-10.150.20.2S00.050.10.150.20.25Time seer(、5(s + 2)(6.3s +1.8)(3) G(s)=(s + 5)(s + 4)(s 3 + 3s 2 + 5) sysa=zpk(-2,-5;-4,5)Zero/pole/gain:5 (s+2) (s+5) (s+4) sysb=tf(,1,3,0,5)Transfer function:s + sys3=sysa*sysbZero/pole/gain:(s+2) (s+(s+5)(s+4)(s+ (s入2-+ st ep(sys3)QJDn Jl_d ujvTiire 9:15有三个系统如图5-1
9、7 (a)、(b)、(c)所示,编程分别绘制各系统的单位阶跃响应和单位 脉冲响应。(a) sysa1=tf(5,1,3,5); sysa2=zpk(-2,0;-3;-5,20); sysa3=tf(,1,2,1); sysa=sysa1*sysa2*sysa3Zero/pole/gain:5 (s+2) (s+10)s (s+3) (s+5) (s+ (s入2+ 3s + 5) step(sysa) impulse(sysa)III口3JIQ.u-ns瑕 UV(b) sysb1=tf(22,1,1,5,23,15); sysb2=zpk(-6,0;-3;-10,); sysb3=5*tf(,1
10、,2,1)*tf(,1,3,7,1); sysb=sysb1-sysb2+sysb3Zero/pole/gain:(s+ (s+ (s+ (s+ (s+(s入2 + +s (s+3) (s+ (s+ (s+ (s+10) (s+ (s入2+ step(sysb) impulse(sysb)(c) G1=tf(10,1,2,0); G2=cloop(tf(1,1),1)Transfer function:1s + 1 G2=feedback(tf(1,1),1,-1) Transfer function:1s + 2 G=G1*G2Transfer function:10s八3 + 3 s八2
11、+ 4 s H=tf(3,1,6,0)+tf(1,1)Transfer function:s入2 + s + 3s八3 + s入2 + 6 s sys=G/(1+G*H)Transfer function:s八6 + 11 S八5 + 82 S八4 + 244 s八3 + 240 s八2s + s八8 + s八7 + s八6 + 123 s八5 + s八4 + 340 s八3 + 342 s八2 + 120 s step(sys) impulse(sys)520( s + 2)0.1s +1s 2 + 3s + 5s( s + 3)( s + 5)2s +1a)C(s)C (s)(b)(c)
12、图5-176.设三阶系统闭环传递函数为(s)_ C(s) _2(s2 + 5s + 6)R (s)s 3 + 6s 2 +10 s + 8试绘制其单位阶跃响应在t e 1.2,5.3内的部分响应曲线。 n1=1,5,6; d1=1,6,10,8; sys1=tf(n1,d1); sys=2*sys1Transfer function:2 s八2 +10 s +12 step(sys,4111111.522.533.544.55TtTe (sec)7.某系统的闭环传递函数为(s)_ C(s) _1.05(0.4762s +1)5 RS) _ (0.125s + 1)(0.5s +1)(s2 +
13、s +1)根据主导极点概念,可知该高阶系统可近似成如下的二阶系统1.05(s)-s 2 + s + 1试在同一图上绘制原系统和近似系统的单位阶跃响应曲线并观察有何区别 sysyuan=tf(,1)*tf(,1,1)*tf(1,1,1,1)Transfer function:s +s入4 +s八3 + s入2 + s + 1 sysjinsi=tf(,1,1,1)Transfer function:s八2 + s +1 step(sysyuan) hold on; step(sysjinsi)8.一种新型电动轮椅装有一种非常实用的速度控制系统,能使颈部以下有残疾的人士自行驾 驶这种电动轮椅。该系
14、统在头盔上以90 o间隔安装了四个速度传感器,用来指示前、后、左、 右四个方向。头盔传感系统的综合输出与头部运动的幅度成正比,图5-18给出了该控制系 统的结构图,其中时间常数T = 0.5s,T3二1s,T = 0.25s。要求134预期速度图5-18 轮椅控制系统分别绘制K二15,8, 2时系统的单位阶跃响应曲线并标注K的值。 解:系统的开环传递函数为亠、KKKKK(Ts + 1)(T s + 1)(T s +1)(Ts + 1)(T s + 1)(T s +1)(0.5s +1)(s + l)(0.25s +1)134134当K = 15时,求取系统单位阶跃响应的程序如下: k=15;
15、no=k; do=conv(,1,conv(1,1,1); nc,dc=cloop(no,do); %求取单位负反馈系统的闭环传递函数分子分母多项式系数 向量 sys=tf(nc,dc)Transfer function:15s 3 + s 2 + s + 16 step(sys) no=k; do=conv(,1,conv(1,1,1); nc,dc=cloop(no,do); sys=tf(nc,dc)Transfer function:s入3 + s入2 + s + step(sys) k=8; no=k; do=conv(,1,conv(1,1,1); nc,dc=cloop(no,do); sys=tf(nc,dc)Transfer function:8s 3 + s 2 + s + 9 step(sys)u-nstuuv k=2; no=k; do=conv(,1,conv(1,1,1); nc,dc=cloop(no,do); sys=tf(nc,dc)Transfer function:2s八3 + s入2 + s + 3 step(sys)Step Respotispa0.7
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
