《2010现代控制理论基础考试题B卷及答案》由会员分享,可在线阅读,更多相关《2010现代控制理论基础考试题B卷及答案(8页珍藏版)》请在装配图网上搜索。
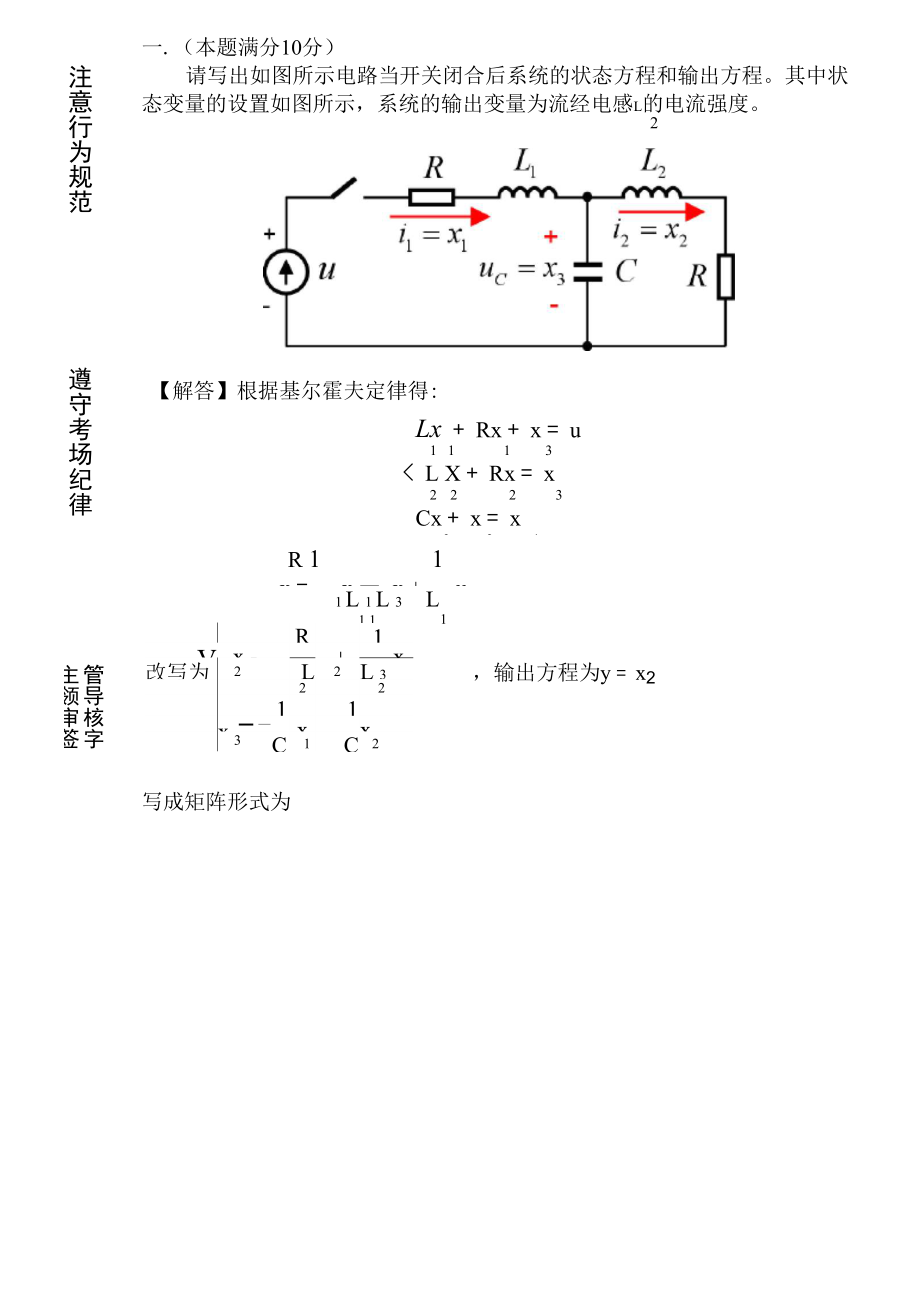
1、注意行为规范遵守考场纪律【解答】根据基尔霍夫定律得:Lx + Rx + x = u1 113 1,所以离散系统不稳定。1 211(3) 由 x (k) = y(k), x (k) = x (k +1)-r(k),可以得到1 2 1x (k +1) = x (k + 2) - r (k +1) = y (k + 2) - r (k +1)21由已知得y(k + 2) - r(k +1) = 2r(k) - 5y(k +1)- 3y(k) = 2r(k) - 5x (k +1) - 3x (k) =2r(k) -5 x (k) + r(k)-3x (k) = -3x (k) - 5x (k) -
2、3r(k)2 1 1 2于是有:x (k +1) = -3x (k) - 5x (k) - 3r(k)2 1 2又因为x (k +1) = x (k) + r(k)12所以状态空间表达式为x (k +1)01 _x (k)j 一11+x (k +1)2_35_x (k)2_-3_r(k)y(k) 1x (k )1x (k )24)系统矩阵为o13 5G,输出矩阵为c 1o, cG loo315-o 1c1 0cG _ 0 1 _rankQ 2 , o能观性矩阵为Qo系统完全能观。三(本题满分 1o 分)回答下列问题:(1)简述线性系统的对偶原理;(2)简述线性定常系统的状态稳定性与输出稳定性的
3、相互关系;(3) r输入r输出r + 2阶线性解耦系统等效于多少个独立的单输入单输出系统?【解答】(1)若线性系统1与线性系统2互为对偶,则系统1的能控性等价于系统2的能观性, 系统1的能观性等价于系统2的能控性。(2)若线性定常系统的状态稳定,则输出必稳定,反之,若线性定常系统的输出稳定, 则状态未必稳定。当且仅当线性定常系统的传递函数没有零极点对消现象时,其状态稳 定性和输出稳定性才是等价的。(3)r输入r输出r + 2阶线性解耦系统等效于r个独立的单输入单输出系统。四.(本题满分10分) fx x 一 x cos x设有一个2阶非线性系统,其状态方程为j x1 2,判断该系统在坐标I 2
4、2原点处的稳定性,并证明你的判断。 【解】此系统在坐标原点处不稳定。【证明】取李雅普诺夫函数V(X) x2 + x2,显然是正定函数,此外,沿着状态轨线的导数为:12V(X) 2xx + 2xx 2x (x 一x cosx )+ 2x2 2x2 2xx cosx + 2x21 12 21122211 222 2(x2 一 x x cosx )+ 2x21 1 2 2 2( 12 x2 一 x x cos x + x2 C0S2 xJ 11 22422 丿1x2 C0S2 x2 2 2(12 x 一 一 x cos xI 1 2 22 丿2 cos2 x22x22五.(本题满分10分)设某控制系
5、统的模拟结构图如下,试判断系统的能控性、能观性和稳定性。【解答】根据模拟结构图可得状态空间表达式x 2 x + 3x + u J 112x 一 x 一 uJ 21写成矩阵形式为-2A -11-10x1x2-2 3-1 00x1xL 2J1+ u-1系统的特征方程为det (九 I 一 A)= X + 21-3 九2 + 2X + 3 0 九显然系统渐近稳定。系统的能控性矩阵为Qc % Ab-1-1-5-1,显然,Qc满秩所以系统状态完全能控。C 10_cA-23_系统的能观性矩阵为Qo =,显然,Q o满秩,所以系统状态完全能观。六(本题满分 10 分)某系统的状态空间表达式为0 01X =x
6、+_ 1 -6 _ 0 _y =0 1 xu设计一个全维状态观测器,使观测器的两个极点均为-io。解答】设全维观测器方程为观测器特征多项式为0-6l112-l1-6 -1-0-1 九11 1,11-6 1 12-1九 + 6 +12det UI 一2=九2 +(6 +1 )九 +121l112l112观测器期望特征多项式为(九 +10 )2 二九 2 + 20九 +100根据多项式恒等的条件得6 +1 二 2012l 二 10017 二 100i = 14,全维状态观测器方程为I 2X _0-100X +ju +j001-20014y七. (本题满分 10 分) 证明对于状态空间表达式的线性变
7、换,其特征方程保持不变【证明】设原线性系统为x = Ax + Bu、y = Cx + Du其特征方程为det (I - A)= 0 设线性变换为x = Tz,变换后的线性系统为Z = T-i ATz + T -BuV、y = CTz + Du该系统的特征方程为det CsI - T-1AT)= 0写成det (sT-iT - T-iAT)= 0det T-i (sI - A)T = 0det (T-i )det (sI - A )det(T ) = 0det (T-i )det(T)det (sI - A)= 0det (T-iT)det (sI - A)= 0det (I )det (sI
8、- a) = 0det (sI - A) = 0显然,其特征方程保持不变。证毕八.(本题满分10分)开环系统的结构如图所示:2h-5兀15+15 + 5FS试用状态反馈的方法,使闭环系统单位阶跃响应的过渡过程时间ts二565秒 s(A = 2),超调量为o p = 4.32%,其中一个闭环特征值为一5。求状态反馈控制律 的数学表达式。【解答】将上述方块图该画成模拟结构图,如下:U I 21 5 +0*,ix = x1 2x = 5 x + 5 x223V写成状态空间表达式为x = x + 2u0y = 1100 0 x15u闭环系统单位阶跃响应的过渡过程时间t = 565秒(A = 0.02)
9、,可得:S45.65 匚3 0.707_ 匚兀=e Z2 = 432%,解得:沁0.707,所以沁1。期望闭环特征多项n超调量为Q 式为n(s +,代入可得闭环系统的状态方程13 s +32)U(S + 5)(s2 + 匹S + 1) f *( s) = s 3 + (5 + y2 )s 2 + ( + 5 jJs 设状态反馈控制律为U二k2勺052k2k2k 13闭环特征多项式为仆s00_一 010s00500s2k2k1L 1205f (s) = det G - A)= det22k 13is 10=det 0 s + 52k2k125s 2k +13=S3 +(6 2k)S2 +(5 10k 10k )s 10k3231根据多项式恒等条件可得:6 2k = 5 + 耀=6.4145 10k 10k = 1 + S/2 = 8.07 2310k =51k = 0.51k = 0.1解得:笃=,状态反馈控制律为k = 0.207u = kk k x = 0.5x 0.1x 0.207x123123
 2010现代控制理论基础考试题B卷及答案
2010现代控制理论基础考试题B卷及答案