《《时域分析法》PPT课件.ppt》由会员分享,可在线阅读,更多相关《《时域分析法》PPT课件.ppt(48页珍藏版)》请在装配图网上搜索。
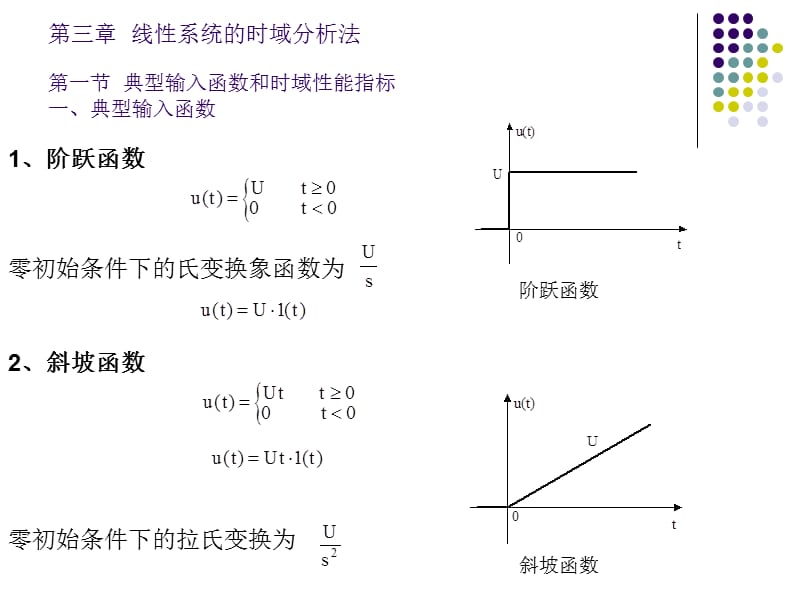
1、,第三章 线性系统的时域分析法 第一节 典型输入函数和时域性能指标一、典型输入函数,1、阶跃函数,零初始条件下的氏变换象函数为,2、斜坡函数,零初始条件下的拉氏变换为,阶跃函数,斜坡函数,3、抛物线函数,零初始条件下的拉氏变换为,抛物线函数,4、冲激函数,冲激函数的拉氏变换象函数为U。单位冲激函数的象函数为1。,5、正弦函数,拉氏变换象函数为,二、时域性能指标,1、延迟时间,2、上升时间,3、峰值时间,4、调节时间,5、最大超调量(超调量),6、稳态误差,第二节 一阶系统的暂态分析,第三节 二阶系统的暂态分析一、二阶系统的数学模型,二、二阶系统的阶跃响应与时域性能指标,1、无阻尼的情形( ),
2、2、欠阻尼情形( ),(1)上升时间,(2)峰值时间,(3)超调量,3、临界阻尼情形( ),4、过阻尼情形( ),例31,已知二阶系统的动态结构图如图所示。当输入量为单位阶跃函数时,试计算系统响应的上升时间、峰值时间、超调量和调节时间。,解 系统的闭环传递函数为,解得,例32,图示系统单位阶跃函数输入时,、若要求,试确定系统参数K和,并计算上升时间和调节时间;、由条件所确定的K值不变,取0时,系统的超调量又是多少?自然振荡角频率是否改变?,解,、K值不变为0时,,可见,K值不变为0时,,不变,但小了,超调量增大了7.6。,引入微分负反馈可以增大阻尼比,降低超调量,不改变自然振荡角频率。,例33
3、,图3.15是具有反馈系数为的负反馈二阶控制系统。,单位阶跃响应特性如图3.16所示,试确定系统参数K,T和。,图3.15 反馈系数为的二阶系统,图3.16单位阶跃响应曲线,解,解得,解得,解得,解得,三、含有闭环零点的二阶系统暂态分析,四、含有闭环极点的二阶系统暂态分析,第四节 高阶系统的暂态分析,第五节 代数稳定判据 一、劳斯(Routh)稳定判据,例34,由劳斯稳定判据确定特征方程为,的控制系统稳定时各系数应满足的条件。,解 劳斯表为,由劳斯稳定判据知,参数满足,时系统稳定。,例35,判定特征方程为 的系统的稳定性。,解 劳斯表为,首列元素的符号由正变负,又由负变正改变了2次,有两个正实
4、部(或正实数)的特征根,系统不稳定。,例36,已知系统的特征方程为,试判定系统的稳定性。,解,在 行出现了首列元素为0的非全0行,用小正数,得到下一行的首列元素为,替代首列0元素后,系统不稳定并且有两个不稳定的特征根。,事实上,四个特征根的数值解分别为,例37,已知特征方程为 试判定该系统的稳定性。,解 劳斯表的计算中出现了全0行,二、劳斯稳定判据的一些应用 1、确定稳定条件下某一参数的取值范围 例38,某控制系统的开环传递函数为,试用劳斯稳定判据确定闭环系统稳定时参数的取值范围。,解,2、确定系统的相对稳定性,例39,带控制器的二阶系统如图所示。,计算系统稳定时的取值范围;在保证有,的稳定裕
5、量时,的取值范围又是多少?,解,令,二、胡尔维茨稳定判据,如果行列式D及其主对角线上各阶顺序主子式 均大于0,,则系统是稳定的,否则系统不稳定。,例310,应用胡尔维茨判据判定具有如下特征方程式的控制系统的稳定性。,解,第六节 稳态误差分析一、稳态误差的定义,1、从输入端定义的稳态误差 。,误差象函数为,,2、从输出端定义的稳态误差 。,二、控制系统的类别,三、给定量输入作用下的稳态误差,1、阶跃函数输入时的稳态误差及稳态位置误差系数,对0型系统,有,对I型系统,有,2、斜坡函数输入时的稳态误差及稳态速度误差系数,型系统的速度误差系数为,型系统的开环传递函数为,3、抛物线函数输入时的稳态误差及
6、稳态加速度误差系数,型系统,例311,图示系统,输入量为给定10V直流电压,输出量为电动机的转速,试问:、,时,输出量的期望值及由输入端和输出端定义的稳态误差各是多少?,、将调大50,上述各量又是多少?,解 、,、,例312,为了消除上例控制系统的稳态误差,在前向通道靠近输入端接入一个积分环节,试分析系统稳定时各物理量的状态。,解,例313,某控制系统的开环传递函数为,试计算,时系统的稳态误差。,解 该系统系型系统。将 看成是三个典型函数的合成。,输入时的稳态误差为0 ;,输入的稳态误差为给定输入的稳态误差,计算为,四、扰动量作用下的稳态误差1、输入端定义的扰动输入稳态误差,2、输出端定义的扰
7、动输入稳态误差,例314,试计算图示系统恒值负载扰动下的稳态误差。通过改变控制器的参数和结构形式能否抑制或消除它?,解,例315,试计算:,、 时系统的稳态误差;,、 时系统的稳态误差。,解 ,五、采取复合控制策略减小稳态误差1、按给定输入补偿的复合控制,图示系统的闭环传递函数为,如果选取,即,则,单位负反馈系统的输出信号完全再现输入信号。称为按给定,作用的完全不变性(全补偿)条件。,例316,前馈补偿装置是一阶微分环节。试选择合适的微分系数使原系统提高一阶无差度,并讨论取值不同时系统的误差状况。,解,时,,时,补偿的结果减小了稳态误差;,时,,为负,输出量大于期望的理论值;,时,,的绝对值大于原有误差。可见,选好参数是重要的。,2、按扰动输入补偿的复合控制,按扰动输入补偿的前馈通道为,前馈控制信号是以负极性接入系统的,扰动量单独作用时的输出量为,按扰动作用的完全补偿条件为,第七节 应用进行时域分析例317,某控制系统的闭环传递函数为,试应用MATLAB求解该系统的单位阶跃响应时域函数。,解 创建MATLAB环境。,r=,p=,k= ,例318,某控制系统的闭环传递函数为,试应用MATLAB绘制其阶跃 响应特性曲线。,解 MATLAB文本程序为,
 《时域分析法》PPT课件.ppt
《时域分析法》PPT课件.ppt