 机械原理大作业1(连杆机构)27题
机械原理大作业1(连杆机构)27题

《机械原理大作业1(连杆机构)27题》由会员分享,可在线阅读,更多相关《机械原理大作业1(连杆机构)27题(18页珍藏版)》请在装配图网上搜索。
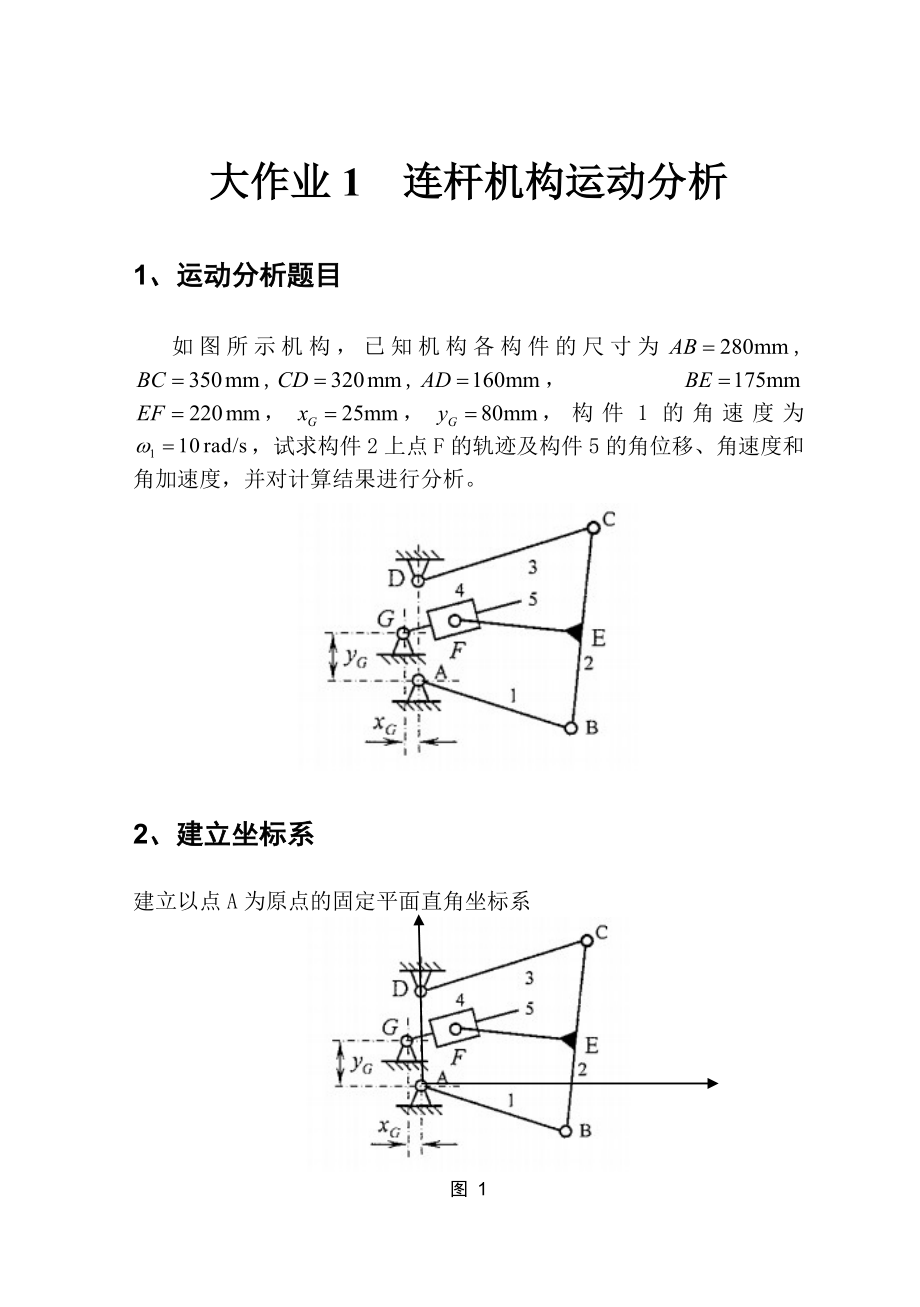
1、大作业1 连杆机构运动分析1、运动分析题目如图所示机构,已知机构各构件的尺寸为,, ,构件1的角速度为,试求构件2上点F的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。2、建立坐标系建立以点A为原点的固定平面直角坐标系图 13、对机构进行结构分析该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。 图 2 图 3 图 44、 各基本杆组运动分析的数学模型(1) 同一构件上点的运动分析:图 5如图5所示的构件AB,已知杆AB的角速度,AB杆长=
2、280mm,可求得B点的位置、,速度、,加速度、。;;。(2) RRRII级杆组的运动分析:图 6 如图6所示是由三个回转副和两个构件组成的II级组。已知两杆的杆长、和两个外运动副B、D的位置(、)、速度()和加速度()。求内运动副C的位置()、速度()、加速度()以及两杆的角位置()、角速度()和角加速度()。1)位置方程为求解上式,应先求出或,将上式移相后分别平方相加,消去得式中: 其中,。为保证机构的装配,必须同时满足和解三角方程式可求得上式中,“+”表示B、C、D三个运动副为顺时针排列;“”表示B、C、D为逆时针排列。将代入中可求得,而后即可求得2) 速度方程将式对时间求导可得两杆的角
3、速度为式中: 内运动副C点的速度为3) 加速度方程两杆的角加速度为式中: 内运动副C的加速度为(3) RPRII级杆组的运动分析图 7 图7是由两个构件与两个外转动副和一个内移动副组成的RPRII级组。已知G点的坐标()以及F点的运动参数(),求杆5的角位移、角速度、角加速度。 5、 计算编程程序流程:1) 已知杆AB的角速度和杆AB的长度可求出B点的运动参数;2) 已知B、D两点的运动参数可求出C点的运动参数及杆2、杆3的运动参数,然后再通过同一构件上点的运动分析可求出F点的运动参数,从而求出F点的轨迹;3) 已知F点和G点的运动参数可求出杆5的角位移、角速度、角加速度。6、 计算结果1)F
4、点的运动参数图 8 点F的运动轨迹图 9 点F的x坐标和y坐标随杆AB角位移的变化图 10 点F的速度在x和y方向的分量随杆AB的角位移的变化图 11 点F的绝对速度随杆B的角位移的变化图 12 点F的加速度在x和y方向的分量随杆AB角位移的变化图 13 点F的绝对加速度随杆AB角位移的变化 对结果的分析:实线分别表示表示点F的在x方向上的坐标、速度、加速度随AB角位移的变化,虚线表示其在y方向上的坐标、速度、加速度随AB角位移的变化。可以看出点F的轨迹是一个封闭的类似于“8”字的图形。另外可以发现杆AB旋转一周,点F类似于转了两周。点F的速度在x方向的分量和在y方向的分量在大小上变化规律基本
5、一致,在AB杆角位移在50100是速度增加很快,其绝对速度增加也较快,从加速度的图像可以明显看出此时加速度增加迅速。2) 构件5的角位移、角速度、角加速度图 14 构件5的角位移图 15 构件5的角速度图 16 构件5的角加速度 结果分析:从图像可以看出AB杆转动一周,GF杆转动两周,而且其角速度变化较大,适合应用于要求在不同阶段速度差异较大的场合。其角加速度变化规律不明显且起伏较大,这对杆件的冲击较大,应注意杆件的强度。附录:程序清单yy=(0:0.1:360); %杆AB的角位移,每隔0.1度计数yy1=yy/180*pi;%转化为弧度xb=280*cos(yy1);%点B的x坐标yb=2
6、80*sin(yy1);%点B的y坐标w=10;%杆AB的角速度vxb=-w*yb;%点B的速度在x方向的分量vyb=w*xb;% 点B的速度在y方向的分量axb=-w*w*xb;% 点B的加速度在x方向的分量ayb=-w*w*yb;% 点B的加速度在y方向的分量xd=0;%点D的x坐标yd=160;% 点D的y坐标vxd=0;%点D的速度在x方向的分量vyd=0;% 点D的速度在y方向的分量axd=0;% 点D的加速度在x方向的分量ayd=0;%点D的加速度在y方向的分量jbcd=ones(1,3601);%给角BCD赋初值fdb=ones(1,3601);%?给角BD赋初值li=350;%
7、杆BC的长度lj=320;%杆CD的长度lbd=ones(1,3601);%给BD赋初值fi=ones(1,3601);% 给杆BC的角位移赋初值fj=ones(1,3601);%给杆CD的角位移赋初值xc=ones(1,3601);% 给点Cx坐标赋初值yc=ones(1,3601);% 给点Cy坐标赋初值ci=ones(1,3601);%给中间变量赋初值cj=ones(1,3601);% 给中间变量赋初值wi=ones(1,3601);% 给杆BC的角速度赋初值wj=ones(1,3601);% 给杆CD的角速度赋初值ss=ones(1,3601);% 给ss赋初值ffg=ones(1,3
8、601);%给构件5的角位移赋初值xg=-25;%点G的x坐标yg=80;% 点G的y坐标vxg=0;%点G的速度在x方向的分量vyg=0;% 点G的速度在y方向的分量axg=0;% 点G的加速度在x方向的分量ayg=0;% 点G的加速度在y方向的分量wgf=ones(1,3601);%给杆GF的角速度赋初值 %求角BCD,角BD for m=1:3601 lbd(1,m)=sqrt(xd-xb(1,m)2+(yd-yb(1,m)2); if (lbd(1,m)abs(lj-li) jbcd(1,m)=acos(li*li+lbd(1,m)*lbd(1,m)-lj*lj)/(2*li*lbd(
9、1,m); elseif lbd(1,m)=(li+lj) jbcd(1,m)=0; elseif (lbd(1,m)=abs(lj-li)&(lilj) jbcd(1,m)=0; elseif (lbd(1,m)=abs(lj-li)&(lixb(1,m) & yd=yb(1,m) fdb(1,m)=atan(yd-yb(1,m)/(xd-xb(1,m); elseif (xd=xb(1,m) & ydyb(1,m) fdb(1,m)=pi/2; elseif (xd=yb(1,m) fdb(1,m)=atan(yd-yb(1,m)/(xd-xb(1,m)+pi; elseif (xd=xb
10、(1,m)&ydxb(1,m)&ydyb(1,m) fdb(1,m)=atan(yd-yb(1,m)/(xd-xb(1,m)+2*pi; elseif (xdxb(1,m)&ydyb(1,m) fdb(1,m)=atan(yd-yb(1,m)/(xd-xb(1,m)+pi; end fi(1,m)=fdb(1,m)-jbcd(1,m);% 杆BC的角位移 if fi(1,m)xd & yc(1,n)=yd) fj(1,n)=atan(yc(1,n)-yd)/(xc(1,n)-xd); elseif (xc(1,n)=xd & yc(1,n)yd) fj(1,n)=pi/2; elseif (x
11、c(1,n)=yd) fj(1,n)=atan(yc(1,n)-yd)/(xc(1,n)-xd)+pi; elseif (xc(1,n)xd & yc(1,n)yd) fj(1,n)=atan(yc(1,n)-yd)/(xc(1,n)-xd)+pi; elseif (xc(1,n)=xd & yc(1,n)xd & yc(1,n)xg & yf(1,i)=yg ffg(1,i)=atan(yf(1,i)-yg)/(xf(1,i)-xg); elseif xf(1,i)=xg & yf(1,i)yg ffg(1,i)=pi/2; elseif xf(1,i)=yg ffg(1,i)=atan(y
12、f(1,i)-yg)/(xf(1,i)-xg)+pi; elseif xf(1,i)xg & yf(1,i)yg ffg(1,i)=atan(yf(1,i)-yg)/(xf(1,i)-xg)+pi; elseif xf(1,i)=xg & yf(1,i)xg & yf(1,i)yg ffg(1,i)=atan(yf(1,i)-yg)/(xf(1,i)-xg)+2*pi; endend %求杆GF的角速度for i=1:3601if ss(1,i)=0 wgf(1,i)=0;else wgf(1,i)=(vyf(1,i)*cos(ffg(1,i)-vxf(1,i)*sin(ffg(1,i)/ss(1,i);endend%求杆GF的角加速度vss=vxf.*cos(ffg)+vyf.*sin(ffg);egf=(ayf.*cos(ffg)-axf.*sin(ffg)-2*vss.*wgf)./ss;%画图%plot(xf,yf,r)%plot(yy,xf,k-,yy,yf,r-)%plot(yy,vxf,k-,yy,vyf,r-)%plot(yy,vf,k-)%plot(yy,axf,k-,yy,ayf,r-)%plot(yy,af,k-)%plot(yy,ffg,k-)%plot(yy,wgf,k-)plot(yy,egf,k-)grid on%画网格线
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
