 FANUC机械手简易培训资料
FANUC机械手简易培训资料

《FANUC机械手简易培训资料》由会员分享,可在线阅读,更多相关《FANUC机械手简易培训资料(5页珍藏版)》请在装配图网上搜索。
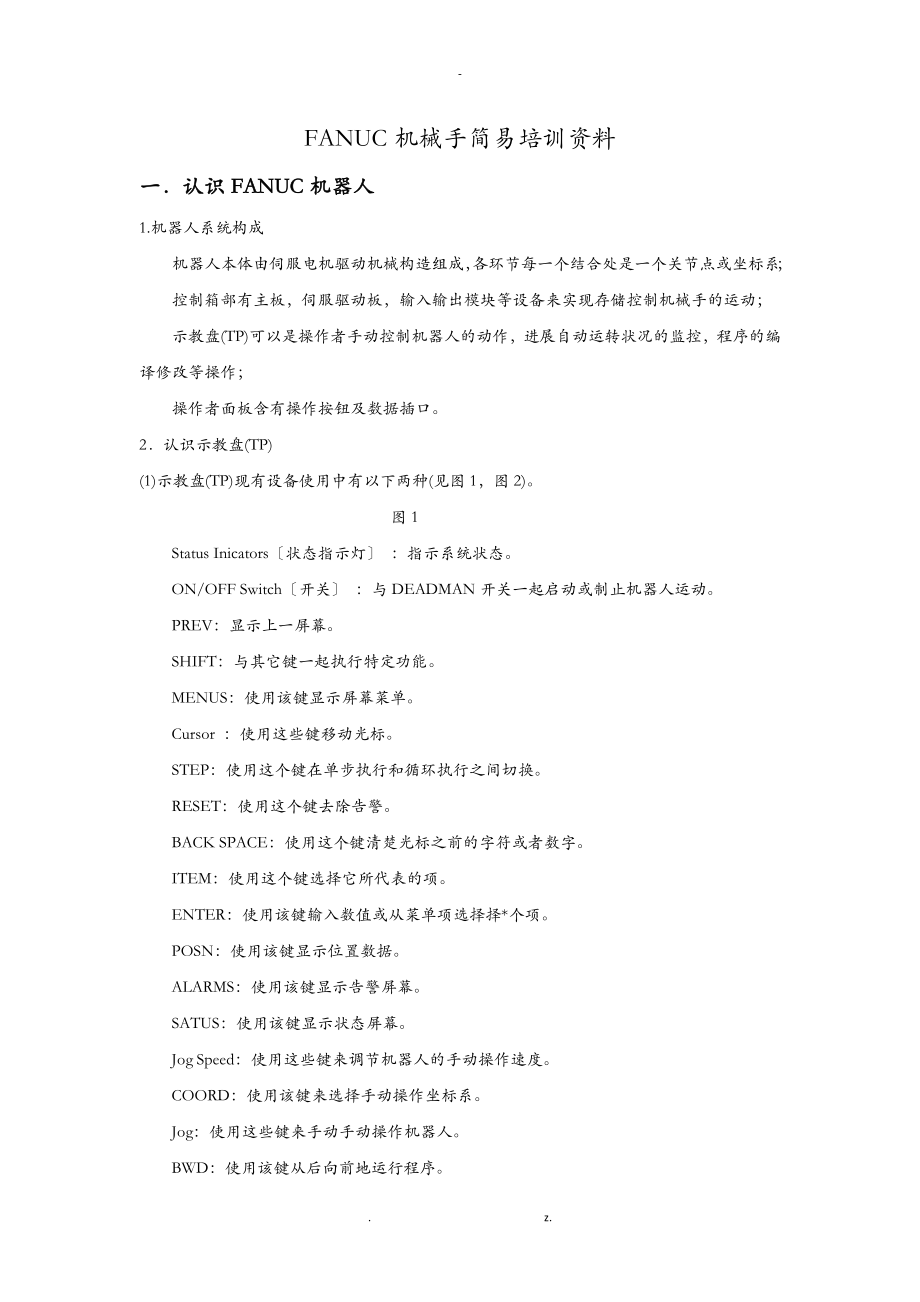
1、-FANUC机械手简易培训资料一认识FANUC机器人1.机器人系统构成机器人本体由伺服电机驱动机械构造组成,各环节每一个结合处是一个关节点或坐标系;控制箱部有主板,伺服驱动板,输入输出模块等设备来实现存储控制机械手的运动;示教盘(TP)可以是操作者手动控制机器人的动作,进展自动运转状况的监控,程序的编译修改等操作;操作者面板含有操作按钮及数据插口。2认识示教盘(TP)(1)示教盘(TP)现有设备使用中有以下两种(见图1,图2)。 图1Status Inicators状态指示灯 :指示系统状态。 ON/OFF Switch开关 :与DEADMAN开关一起启动或制止机器人运动。 PREV:显示上一
2、屏幕。 SHIFT:与其它键一起执行特定功能。 MENUS:使用该键显示屏幕菜单。 Cursor :使用这些键移动光标。 STEP:使用这个键在单步执行和循环执行之间切换。 RESET:使用这个键去除告警。 BACK SPACE:使用这个键清楚光标之前的字符或者数字。 ITEM:使用这个键选择它所代表的项。 ENTER:使用该键输入数值或从菜单项选择择*个项。 POSN:使用该键显示位置数据。 ALARMS:使用该键显示告警屏幕。 SATUS:使用该键显示状态屏幕。 Jog Speed:使用这些键来调节机器人的手动操作速度。 COORD:使用该键来选择手动操作坐标系。 Jog:使用这些键来手动
3、手动操作机器人。 BWD:使用该键从后向前地运行程序。 FWD:使用该键从前至后地运行程序。 HOLD:使用该键停顿机器人。 Program keys程序键 :使用这些键选择菜单项。FCTN:使用该键显示附加菜单。 Emergency Stop Button紧急停顿按钮:使用该键停顿正在运行的程序,关闭机器人伺服系统的驱动电源,并对机器人实施制动。 图2(2)TP上的开关 TP开关:此开关控制TP有效/无效,当 TP无效时,示教、编程、手动运行不能被使用。 DEADMAN开关:当TP有效时,只有DEADMAN 开关被按下,机器人才能运动,一旦松开,机器人立即停顿运动。 急停按钮:此按钮被按下,
4、机器人立即停顿运动。.TP的状态指示67870部品使用的弧焊机器人有两种TP,第三站夹具焊接机器人TP为侧显LED状态指示灯,如下所示。 FAULT:显示一个报警出现。 HOLD: 显示暂停键被按下。 STEP: 显示机器人在单步操作模式下。 BUSY: 显示机器人正在工作,或者程序被执行,或者打印机和软盘驱动器正在被操作。 RUNNING: 显示程序正在被执行。 WELD ENBL: 显示弧焊被允许。 JOINT: 显示示教坐标系是关节坐标系。 *YZ: 显示示教坐标系是通用坐标系或用户坐标系。 TOOL: 显示示教坐标系是工具坐标系。67870部品其他三站工作机械手TP界面,状态显示被整合
5、进显示屏中,具体显示见下TP显示屏容,各个显示含义雷同。TP的显示屏 两种TP的显示屏分别如以下图所示。3.操作者面板4.远端控制器 远端控制器是和机器人控制器相连的外围设备,用来设置系统,包括以下形式: 用户控制面板 可编程控制器PLC 主控计算机Host puter5.外部I/O 外部信号是发送和承受来自远端控制器或周边设备的信号,可以执行以下功能: 选择程序 开场和停顿程序 从报警状态中恢复系统 其他6.急停设备 * 2个急停按钮一个位于操作箱面板,一个位于TP面板 * 外部急停输入信号 外部急停按钮信号通常有主操作盘急停,触摸屏副操作盘急停,光电急停信号,平安栅急停信号等。二.平安操作
6、规程 1.示教和手动机器人 1请不要带者手套操作示教盘和操作盘,以防止误触碰按键造成危害。 2在点动操作机器人时要采用较低的倍率速度以加强对机器人的控制以防止碰撞。 3在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 4要预先考虑好避让机器人的运动轨迹,并确认该线路不受干预。 5操作者应注意所处区域要远离机器人下一步动作活动区域。2.生产运行 1在开机运行前,须知道机器人根据所编程序将要执行的全部任务。 2须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。 3必须知道机器人控制器和外围控制设备上的紧急停顿按钮的位置,准备在紧急情况下按这些按钮。4严禁踩踏机器人本体及控制设施,
7、注意平安标识。 5永远不要认为机器人没有移动其程序就已经完成。因为这时机器人很有可能是在等待让它继续移动的输入信号。6机器人运行过程中应尽量防止遮挡光电管造成机器人急停,以免机器人剧烈摆动造成碰撞;如有需要停顿,能使用暂停优先使用暂停。7机器人运行过程严禁进入机器人工作区域,如有需要,通过平安门或是使机器人停顿后进入,并要求有监护者,以防止误投入运转造成机器人动作发生人身伤害。8机器人运转过程中不要切换手动开关,等待程序完成,指示灯亮后再进入工作区域,以防止机器人无法再启动。三常见简易故障排除1.紧急停顿无法投入运转查看光电管是否被遮挡,是否对正;查看各个急停按钮是否被压下,平安门插销是否被拔
8、出。 *注:紧急停顿后夹具气源被电磁阀切断,会导致气缸位置移动造成工件变形,投入运转通气后夹紧不到位,投入运转前请确认。2.机器人焊接异常粘丝处理触摸屏提示机器人异常后,首先查看是否存在碰撞,排除后进展再启动操作并查看是否启动焊接;当再次出现异常,机器人沿着焊道移动但不焊接,则可以判断焊丝送丝存在堵塞;依次处理步骤:(1) 查看机器人工作区域是否存在碰撞可能,按下触摸屏旁暂停按钮;(2) 待遮光幕升起后在光电管外查看导电嘴前焊丝,假设明显存在堵塞,则解除暂停后,将所对应的机器人模式切换开关切至T2;(3) 拿起TP后,翻开示教盘开关并压下DEADMAN开关,按下RESET键解除报警信息,当状态
9、灯均显示为绿色指示后,表示可以进展示教操作;(4) 切换为T2后,系统自动将运行速度降至低速,按下Shift与BWD键将程序倒退倒退操作时系统默认为单步执行至起弧点之前一步以使焊枪离工件一段距离方便操作;按下Shift与Wire+送丝,查看导电嘴是否有焊丝送出,如没有,清洁导电嘴或更换,直至有焊丝送出;(5) 保持焊丝端部至导电嘴距离为10mm左右,松开DEADMAN开关,关闭示教盘开关,按+%键将速度调制100%程序自动运转时要求必须为100%速度,没有单步状态,悬挂好示教盘;(6) 切换模式为AUTO,解除触摸屏报警,无异常后再启动机器人运转,如仍不能进展焊接,联系保全人员解决故障。*注:如操作过程中造成了紧急停顿,则夹具气源被切断,可能会造成气缸移动使工件位置变动,在解除紧急停顿前需查看是否有上述状况,以免投入运转后造成夹具异常报警!作成:庹文鑫2021年3月23日教育之通病是教用脑的人不用手,不教用手的人用脑,所以一无所能。教育革命的对策是手脑联盟,结果是手与脑的力量都可以大到不可思议。教育之通病是教用脑的人不用手,不教用手的人用脑,所以一无所能。教育革命的对策是手脑联盟,结果是手与脑的力量都可以大到不可思议。. z.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
