 船用阀门控制器的设计
船用阀门控制器的设计

《船用阀门控制器的设计》由会员分享,可在线阅读,更多相关《船用阀门控制器的设计(32页珍藏版)》请在装配图网上搜索。
1、、八 、,前言从上个世纪的“十阀九漏” ,到目前不少产品出口国外,我国的阀门行业取得 长足进步。但来自中国通用机械工业协会阀门会的资料显示,我国每年阀门市场成 交额高达 500 亿左右,其中却有 100 多亿元的市场被国外阀门企业占领,要改变 这种现状,通过创新技术提高阀门质量是关键。随着全球经济和海洋运输业的发展,遥控阀门系统成为大型化,高自动化船舶 中必须配置的设备之一,而阀门驱动器则是实现船用阀门遥控系统国产化的关键部 件。特别是针对化学制品船、油船能带有危险性的船舶有其重要的作用。随着 工业自动化的不断发展,国内外的多家船舶制造商都开始将总线控制技术引入 到船舶自动化系统中,从而提高了
2、船用阀门控制系统的稳定性和可靠性。在谈到我国阀门行业的现状时,北京市市政工程设计研究总院教授级高级工程 师王光杰、张延蕙认为,虽然我国从事阀门生产的企业很多,但多属中小企业。少 数小企业既无图纸,也无工艺,更没有技术人员,产品不符合国家标准,甚至生产 假冒伪劣产品,严重扰乱了阀门市场,也浪费了宝贵的资源。不少大的国有企业面 临着包袱重、 资金困难、 技术陈旧的问题, 又没有力量进行技术改造和投资新项目。 阀门技术与国际先进水平大概相差 10 年左右,比如一些高温高压和耐强腐蚀的产 品无法生产,海洋石油幵采使用的阀门要求1015年不泄漏,我们也基本达不到这种要求。长途管道输送主线还都用的是国外产
3、品,国内产品只能用在支线上。基于上述这一情况,本文设计了基于嵌入式智能阀门控制器的设计。控制器的 设计用 ARM 微处理器,集测量、控制和远程传输于一体。通信部分的设计采用工 业控制计算机、通过 CAN 总线与电液阀控制器通信,可以实现远程控制阀门开关、实时显示阀门的各相关信息等。软件设计采用Visual Basic 6.0实现对下位机控制系统的信息采集、处理与远程监控等。然后进行初步的分析设计和进一步的实施, 通过VB编写需要的程序,最后对系统总体性能进行测试研究。1绪论1.1课题研究背景按照阀门驱动性质划分,管路上阀门的驱动装置主要有液压驱动、电气驱 动、气动驱动以与电液驱动等,各种方式都
4、有其优缺点。传统的船用阀门普遍 采用液压驱动方式,液压驱动是以一定压力的油液作为工作介质来驱动液压驱 动头来工作,并将驱动头的水平运动转换为幵关阀门的操作。其中每个阀门须 两根由铜管制成的油路管作用于阀门,从而实现对阀门的幵启、关闭,以与调 节控制,所以控制装置与执行装置之间的距离一般又比较远,故使得这种阀门 控制方式既浪费铜材又增加了船体自身的重量,还占据了船体有限的空间。基于传统阀门控制的这一缺点,国内外的多家船舶制造商幵始研究新的解 决方案。一种基于现场总线的电子液压驱动方式逐渐被引入到船舶阀门制造领 域。现场总线是一种应用于生产现场,在现场设备之间、现场设备与控制装置 之间实现双向、串
5、行、多节点数字通信的技术。现场总线体现了分布、幵放、 互联、高可靠性的特点。1.2 课题研究的意义与内容近年来,随着船舶自动化程度的提高,越来越多的油船、化学制品船都采 用远程阀门遥控系统,一来体现了阀门遥控系统的迅速发展,二来提高了其安 全性、稳定性和可靠性,成为了船舶货油系统和压载水系统稳定运行的有力保 障。我国作为造船大国,每年船舶的产量都在数百上千艘,在世界上与日本相 当且仅次于韩国。随着国际造船业日益向着自动化、智能化、舒适化等目标发 展,船舶对于装卸自动化系统以与动力、滑油冷却、消防等系统的高端配套设 备提出了更高的要求。 通常船舶上的阀门很多, 其中大部分工作在危险的地方, 这些
6、危险的地方就需要阀门遥控系统来精确的控制它们的开关。但是我国的阀 门遥控系统以与其所属的船舶装卸自动化系统技术几乎都被国外产品所垄断, 我国自主生产率极低,所以发展我国船舶阀门遥控系统自主化刻不容缓。嵌入式系统的引进,可提高遥控系统的精确度,提升设备的性能和优化其 结构。针对其结构特点开发相应软件的程序员不需要知道设备的具体结构,也 不需要知道其具体的工作原理,就可以开发出想对应的工业软件,这在一定程 度上减轻了推广智能阀门远程遥控系统的难度。1.3 课题研究的目的本文研究了船用阀门控制器的设计,此次设计综合利用了嵌入式系统,总线 技术,工业控制等,完成了船用智能阀门控制器的设计。船用智能阀门
7、控制器的设 计不仅提高了生产的可靠性和稳定性,也促进了工业化的高速发展,在每次的设计 与突破之中,船用阀门控制器会得到不断的创新与发展。同时,也提高了我独立思考问题的能力,进一步让我了解到了关于船用阀门的技术知识2 CAN 总线与嵌入式技术2.1 CAN 总线CAN 是 Controller Area Network 的缩写, 是 ISO 国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型与对可靠性的要求不尽相同,由多条总线构成的情况很多,线 束的数量也随之增加。为适应“减少线
8、束的数量”、“通过多个 LAN ,进行大 量数据的高速通信”的需要, 1986 年德国电气商博世公司开发出面向汽车的 CAN 通信协议。此后, CAN 通过 ISO11898 与 ISO11519 进行了标准化, 现在在欧洲已是汽车网络的标准协议。CAN 属于现场总线的范畴 , 它是一种有效支持分布式控制或实时控制的串 行通信网络。较之目前许多 RS-485 基于 R 线构建的分布式控制系统而言 , 基 于 CAN 总线的分布式控制系统在以下方面具有明显的优越性:( 1 )网络各节点之间的数据通信实时性强。( 2 )开发周期短。(3)已形成国际标准的现场总线。(4)最有前途的现场总线之一。相对
9、其它总线技术, CAN 总线又有如下优点:(1)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。(2)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。( 3)具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到 CAN-bus 上,形成多主机局部网络。( 4)可根据报文的 ID 决定接受或屏蔽该报文。(5)可靠的错误处理和检错机制。(6)发送的信息遭到破坏后,可自动重发。(7)节点在错误严重的情况下具有自动退出总线的功能。(8)报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。211 CAN 总线的产生与发展控制器局部网( CAN CONTROLLE
10、R AREA NETWORK )是 BOSCH 公 司为现代汽车应用领先推出的一种多主机局部网,由于其高性能、高可靠性、 实时性等优点现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪 器以与建筑、环境控制等众多部门。控制器局部网将在我国迅速普与推广。随着计算机硬件、软件技术与集成电路技术的迅速发展,工业控制系统已 成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。由于对 系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多 元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。由于 CAN 为愈来愈多不同领域采用和推广,导致要求各种应用领域通信 报
11、文的标准化。为此, 1991 年 9 月 PHILIPS SEMICONDUCTORS 制订并发 布了 CAN 技术规范( VERSION 2.0 )。该技术规范包括 A 和 B 两部分。 2.0A 给出了曾在 CAN 技术规范版本 1.2 中定义的 CAN 报文格式,能提供 11 位地 址;而 2.0B 给出了标准的和扩展的两种报文格式, 提供 29 位地址。 此后,1993 年 11 月 ISO 正式颁布了道路交通运载工具 - 数字信息交换 - 高速通信控制器 局部网( CAN )国际标准( ISO11898 ),为控制器局部网标准化、规范化推 广铺平了道路。212 CAN 总线的特点CA
12、N 总线是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤 维。通信速率可达 1MBPS 。 CAN 总线通信接口中集成了 CAN 协议的物理层 和数据链路层功能, 可完成对通信数据的成帧处理, 包括位填充、 数据块编码、 循环冗余检验、优先级判别等项工作。 CAN 协议的一个最大特点是废除了传 统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点可使 网络内的节点个数在理论上不受限制, 数据块的标识码可由 11 位或 29 位二进 制数组成,因此可以定义 2 或 2 个不同的数据块,这种按数据块编码的方式, 还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有
13、 用。数据段长度最多为 8 个字节,可满足通常工业领域中控制命令、工作状态 与测试数据的一般要求。同时, 8 个字节不会占用总线时间过长,从而保证了 通信的实时性。 CAN 协议采用 CRC 检验并可提供相应的错误处理功能,保证 了数据通信的可靠性。 CAN 卓越的特性、极高的可靠性和独特的设计,特别 适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已公认为 最有前途的现场总线之一。 CAN 总线采用了多主竞争式总线结构,具有多主 站运行和分散仲裁的串行总线以与广播通信的特点。 CAN 总线上任意节点可 在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之 间实现自
14、由通信。 CAN 总线协议已被国际标准化组织认证,技术比较成熟, 控制的芯片已经商品化, 性价比高, 特别适用于分布式测控系统之间的数通讯。 CAN 总线插卡可以任意插在 PC AT XT 兼容机上, 方便地构成分布式监控系统。 且其结构简单, 只有两根线与外部连接, 并且内部集成了错误探测和管理模块。213 CAN 总线技术介绍由于数据处理对传输速度有很高的要求,所以要对数据进行实时处理就要 求数据的物理传输通路有较高的速度。 在几个站同时需要发送数据时 ,要求快速 地进行总线分配。 CAN 总线以报文为单位进行数据传送,报文的优先级结合在11位标识符中,具有最低二进制数的标识符有最高的优先
15、级。这种优先级一旦 在系统设计时被确立后就不能再被更改。总线读取中的冲突可通过位仲裁解 决。CAN具有较高的效率是因为总线仅仅被那些请求总线悬而未决的站利用,这些请求是根据报文在整个系统中的重要性按顺序处理的。这种方法在网络负 载较重时有很多优点,因为总线读取的优先级已被按顺序放在每个报文中了,这可以保证在实时系统中较低的个体隐伏时间。对于主站的可靠性,由于CAN协议执行非集中化总线控制,所有主要通信,包括总线读取 (许可)控制,在系统中分几次完成。这是实现有较高可靠性的通信系统的唯一方法。不同于其它总线, CAN总线协议不能使用应答信息。但是可以将发生的 任何错误用信号发出,CAN总线协议使
16、用的检查错误的方法有以下五种:(1 )循环冗余检查(2)帧检查(3 )应答错误(4 )总线检测(5)位填充如果至少有一个站通过以上方法探测到一个或者多个错误,它将发送出错 标志终止当前发送。这可以组织其它站接受错误的数据,并保证网络上的数据 的一致性。当大量发送数据被终止后,发送站会自动地重新发送数据。但是这种方法存在一个问题,即一个发生错误的站将导致所有的数据被终止,其中也包括正确的数据,所以,如果不采取自检测措施,总线系统应采用 模块化设计。因此,CAN总线协议提供一种将偶然发生的错误从永久发生的错误和局部站失败中区别出来的方法。这种方法可以通过对出错站统计评估来确定一个站本身的错误并进入
17、一种不会对其它站产生不良影响的运行方法来实现,即站可以通过关闭自己来阻止正常数据因被错误地当成错误数据而被终。2 . 2 ARM7微处理器ARM7处理器是 ARM通用32位微处理器家族的成员之一,ARM处理器具有优异的性能,但功耗却很低,使用门的数量也很少,这很适合用于对于功耗要求严格的船用阀门的应用。ARM结构是基于精简指令集计算机(RISC )原理设计的,指令集和相关的译码机制比复杂指令集计算机要简单的多,这样的简化实现了 ARM处理器的如下特点:(1 )高的指令吞吐量(2) 出色的实时中断相应(3) 小的、高性价比的处理器宏单元本文采用的是 LPC2119 ARM7 处理器,LPC211
18、9是基于一个支持实时仿真和跟踪的 16/32 位ARM7TDMI-S CPU ,并带有128/256K 字节嵌入的高速Flash存储器。128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟率下运行。对代码规格有严格控制的应用可使16位Thumb模式将代码规模降低超过 30%,而性能的损失却很小。由于LPC2119/2129 非常小的64脚封装、极低的功耗、多个32位定时器、4 路10位ADC、2路CAN、PWM 通道、46个GPIO以与多达9个外部中断使它 们特别适用于汽车、工业控制应用以与医疗系统和容错维护总线。由于内置了宽范围的串行通信接口,它们也非常适合于通信网关、协议转换
19、器以与其它各种类型的 应用。221 LPC2119 主要特性ARM 的全称是 Advanced RISC Machines, 采用了精简指令集计算机( Reduced Instruction Set Computer , RISC )指令结构, ARM 微处理器包 括很多系列,下面具体介绍本文所用到的 ARM7 微处理器系列。ARM7 系列微处理器为低功耗的 32 位 RISC 处理器,小型、快速、低能 耗、集成式 RISC 内核,用于移动通信。 ARM7 微处理器系列具有以下特点: ( 1) 16/32 位 ARM7TDMI-S 核,超小 LQFP64 封装。( 2) 16 kB 片内静态
20、RAM 。(3) 128/256 kB片内Flash程序存储器,128位宽度接口 /加速器可实现高达 60 MHz 工作频率。(4) 通过片内boot装载程序实现在系统编程(ISP)和在应用编程(IAP)o 512 字节行编程时间为 1ms 。单扇区或整片擦除时间为 400ms 。(5) EmbeddedICE-RT可实现断点和观察点。当使用片内RealMonitor软件对前 台任务进行调试时,中断服务程序可继续运行。(6) 嵌入式跟踪宏单元(ETM )支持对执行代码进行无干扰的高速实时跟踪。(7) 2个互连的CAN接口,带有先进的验收滤波器。(8) 4路10位A/D转换器,转换时间低至2.4
21、4血。2(9) 多个串行接口,包括 2个16C550工业标准UART、高速I C接口( 400 kbit/s ) 和2个SPI接口(10 )通过片内PLL可实现最大为60MHz的CPU操作频率。(11)向量中断控制器。可配置优先级和向量地址。( 12) 2个32 位定时器(带 4路捕获和 4路比较通道)、 PWM 单元( 6路输出)、实 时时钟和看门狗。(13) 多达46个通用I/O 口(可承受5V电压),9个边沿或电平触发的外部中断引 脚。(14) 片内晶振频率范围:130 MHz o( 15) 2个低功耗模式:空闲和掉电。(16 )通过外部中断将处理器从掉电模式中唤醒。(17 )可通过个别
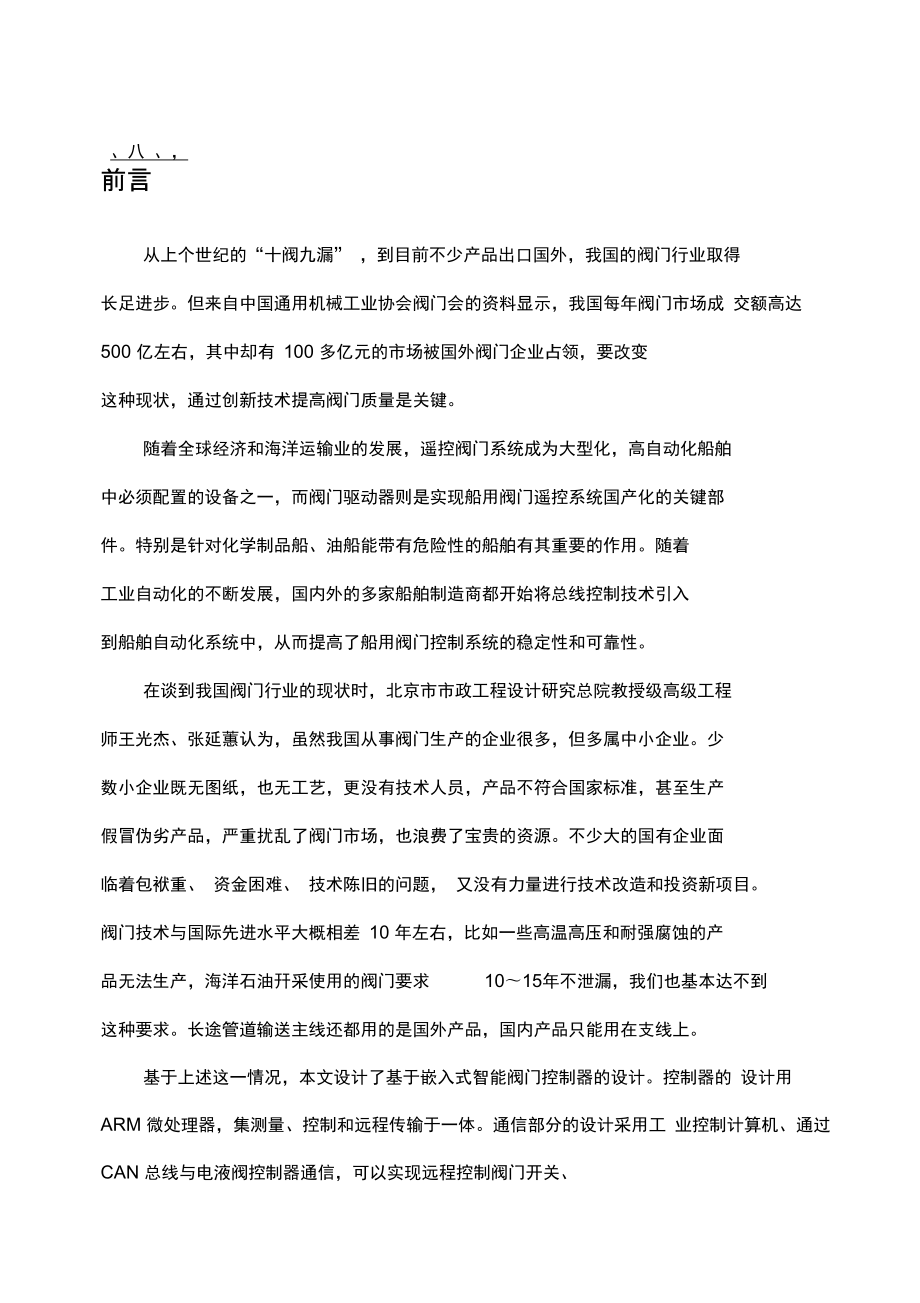
22、使能/禁止外部功能来优化功耗。( 18 )双电源 oCPU操作电压范围:1.65 1.95 V(1.8 V 0.15 V)I/O操作电压范围:3.03.6 V(3.3 V 10%),可承受5V电压。其结构图如图 2-1 所示:ARM?内 $ SR KfHSRAM雷齡FLAEH控期耦述闢册口ARM7JDMSNAHHR中剛:为普*F空抚別!匕AMD AIIBVMnVAH-4i*XHH U VPIIVFH|折甘蝴Sn1幽G郭kHH ASHF IWII:HVI71WI :动力单元1r安装于甲M. I的应益操作阀l_安装T趣动器上 的应急操作阀站双作H驱动器収作用驱动器的开关量樓拟童图3-1 :液压驱动
23、阀门结构图但是这种方案的缺点很明显,一来只能用在干式场合(散货船、集装箱船等)不能用于浸没式的场合(油船、化学品船能);其次总体维修成本高,可靠性相对 较差。所以可以看出,液压驱动阀门遥控系统具有总体价格便宜,容易维护,且适 用范围广的特点;而电液驱动阀门遥控系统具有将液压和电气集中在一起,省去了 电磁阀箱和液压泵站的特点,但存在一般不能用于需安装在浸没场合的缺点。3.2 系统总体设计 首先对系统进行分析后可知,基于 CAN 总线的智能阀门应有如下功能:(1) 接收电机电流检测信号,与额定电流进行比较,用来控制电机的起停与正反转, 并实现电机故障检测与保护。(2) 接收控制信号与压力反馈信号,
24、将两者进行比较,进一步实现对电机故障的检 测与保护。;(3) 实现零点,行程,灵敏度以与电机额定电流等参数的设定。(4) 具有 CAN 通信接口,实现远程监控。所以得先对电机的电流大小和压力的大小有所了解,才能进一步进行设计。用 一个简单的控制器控制电机的启动和停止,简单控制过程是:阀门启动,全部打开 后 3 秒钟停止,过 5 秒钟重新启动,阀门开始关闭,全部关闭后 3 秒钟停止,过 5 秒钟重新启动,循环前面。运行结果如图3-2所示:图3-2 :运行图从图中电流的变化过程我们可以看到,在阀门全幵或是全闭之后可以看到电流 会变大,根据这一点可以控制电机的启停和正反转。以上功能分析可以看出,系统
25、功能的要求并不复杂。这里控制器CPU选择LPC2119 ARM7 处理器,其高性能、低功耗领域发 统总体 如图的特点可以在工业图 3-3 系统硬件结构图3.3 控制器硬件设计控制器的设计主要包括硬件设计和软件设计,硬件设计是整个系统的根本,只 有在完善的硬件上才能编出完善的软件来运行整个系统,从而使整个系统达到理想 的结果。启动电源后, ARM 主机开始系统初始化, 如操作系统初始化, I/O 初始化, 定时器初始化,串口初始化,创建任务如采样、保护、通信、调试等任务,最后进 入正常监控运行状态。系统通过 CAN 总线与上位机或者网关连接,测控模块完成 电流信号、开关量的采集,并根据系统设置执
26、行相应的动作。根据设计要求, 本文中的 ARM 开发基于 LPC2119 微处理器,需开发如下电路: 复位电路、时钟电路、稳压电源电路等基本电路,压力信号采集、电流信号采集等 前项通道的电路设计,电机控制电路后项通道的电路设计,通信电路的设计等。33 1 最小应用系统的电路设计(1)复位电路LPC2119 开始执行程序前,首先要对机器内部的全部寄存器、 I/O 接口等进行 复位,所以整个设计中首先需要一个复位电路。 LPC2119/2129/2194/2292/2294 有两个复位源: RESET 管脚和看门狗复位。 RESET 管脚为施密特触发输入管脚,带有一个额外的干扰滤波器。任何复位源提
27、供的芯片复位都会启动唤醒定时器,复 位将保持有效直至外部复位撤除,振荡器幵始运行。当计数达到一个固定个数的时 钟时,Flash控制器完成其初始化。(2 )时钟电路LPC2119内部集成时钟电路,可以给系统运行提供准确的时钟。(3)直流稳压电源设计为了确保整个系统能够有效的运行,我们必须有一个电源模块,且它的精度对于整个系统而言有着重要的影响。我们所需要的直流稳压源包括电源变压器、整流、滤波和稳压电路四部分,在经过这四部分后可以得到比较稳定的直流电源,但是通 常这样得到的电压还会有波动,并不是十分稳定的,所以需要加个稳压电路。直流 稳压电路如图3-4所示:图3-4直流稳压电源电路本系统提供电压,
28、系统中所用工作电压需要+12V还需要+5V,故用集成稳压器LM78M05将+12V电压转换为+5V电压,这类稳压器所需外接元件少,因为其芯片内部已经设有过流、过热保护以与调整管安全保护电路,所以使用非常方便,而且可靠,被广泛应用于各种电子设备中。电源电路如图3-7所示,电路中接入电容用来实现频率补偿,防止稳压器产生高频自激震荡和抑制电路中引入的高频干扰,电解电容用以减小稳压电源输出端由输入电源引入的低频干扰。33 2 前项通道的设计前项通道设计即阀门端的硬件设计,一般包括信号采集、信号调节以与信号转 换等电路,是微处理器和被测对象与控制参数输入部分之间联系必不可少的桥梁。(1)电机电流反馈信号
29、输入接口 为了保证电机的正常运行,需要在电机运行时对电机的实际电流进行检测,并 将检测结果与额定电流进行比较,还要注意进行过流、堵转等故障处理。在电机运 行时会出现一些非正常状态,一般当检测到电动机电流超过额定电流的 28 倍时, 可以说其处于非正常状态,当然如果这种情况很短暂的,可以不把其认为是非正常 状态。控制器在对检测到的电流进行处理时,根据电机电流与额定电流的比值大小 确定时间 t ,如果电机在一定时间 t 内保持过流,则断开电机,发出报警信号;如 果电机电流是额定电流的 810 倍,则判断为电机短路,则立即断开电机,发出报 警信号;当检测到电流小于额定电流的 0.6 倍,如果电机电流
30、小于额定电流的 0.6 倍达到一定的时间,则认为电机断相,立即断开电机,发出报警信号。经过分析, 本系统采用霍尔型电流互感器对电机电流进行检测。关于霍尔型电流传感器这里不 做详细介绍。本系统选用的是300W/220V 的单相交流电机,故选择SENSOR (北 京森社)霍尔电流传感器 CHS-3A/V1 ,其额定电流为 3A 、可隔离测量交流电流、 输出15V直流标准信号、电源电压为 12V。电机电流经过霍尔型电流传感器,输 出为 15V 标准电压,经其电压比较器 LM393 ,输出转化为数字信号,电路如图 3-5 所示:图3-5电机电流检测电路(2 )压力反馈信号输入接口由于阀门系统是建立在油
31、压的基础上,经过传输、处理,送至控制器,再经过系统 的比较、分析作出相应的控制判断,从而使整个系统可靠的运行。根据分析,本系 统采用PTP503油压变送器,PTP503油压变送器采用不锈钢整体构件,进口弹性 原件,高精度应变计与先进的贴片工艺,油压变送器具有灵敏度高、性能稳定、良好的抗冲击能力。其主要技术参数如下:壬口量程:-0.1 0 1 150(MPa)综合精度:0.25%FS、0.5%FS、1.0%FS输出信号:420mA(二线制)、05V、15V、010V(三线制)供电电压:24DCV(9 36DCV)介质温度:-20 85 150 C环境温度:常温(-2085 C )负载电阻:电流输
32、出型:最大 800 Q;电压输出型:大于50K Q绝缘电阻:大于 2000M Q (100VDC)密封等级:IP65长期稳定性能:0.1%FS/年振动影响:在机械振动频率20Hz1000Hz内,输出变化小于0.1%FS电气接口(信号接口):紧线螺母+四芯屏蔽线机械连接(螺纹接口):1/2-20UNF 、M14 X 1.5、M20 X 1.5、M22 X等1,5其它螺纹可依据客户要求设计外形尺寸: M20 X26 X 115由压力传感器采集到的模拟量压力反馈信号经电压比较器LM393,输出数字量信号,再输入微处理器I/O 口,压力反馈信号拾取电路图如图3-6所示:图3-6压力反馈信号拾取电路3
33、. 3 . 3后项通道设计后项通道的设计主要是针对电机正反转控制电路的设计,电机正反转控制部分要求电机能实现正反转的换向功能,并且要求正反转互锁。本文选用固态继电器(Solid State Relay ,简称SSR)作为幵关器件。微处理器的控制信号经过光耦TPL521-1隔离,将信号传给继电器驱动单相电机正反转。其电路如图 3-7所示:图3-7电机正反转驱动电路4软件介绍上面详细介绍了整个系统的硬件设计部分,该章将重点介绍系统的软件部分的 设计。一个系统能否有效的运行,很大程度上取决于软件设计的优劣。一个合理的 软件设计能够充分发挥微处理器的运算和逻辑控制能力,可靠地实现系统的各种功 能。4.
34、1控制器软件设计控制器的编程选用 ADS1.2软件,ADS1.2是一个使用方便的集成幵发环境,全称是ARM Developer Suite v1.2。它是由ARM公司提供的专门用于 ARM相关应用幵发和调试的综合性软件。在功能和易用性上比较 SDT都有提高,是一款功能 强大又易于使用的幵发工具。ADS囊括了一系列的应用,并有相关的文档和实例的 支持。使用者可以用它来编写和调试各种基于ARM家族RISC处理器的应用。ADS主要由以下部件构成:(1 )命令行幵发工具(2)图形界面幵发工具(3)各种辅助工具(4 )支持软件本文中的CAN总线和各阀门端的关系如图 4-1所示:图4-1系统总体结构图根据
35、分析,本文需要对 CAN总线实现初始化、设置中断响应函数、发送数据等功能。流程图如图4-2所示:图 4-2 CAN 总线流程图这里分布介绍:(1) 初始化 CAN使用 CANInit() 函数完成创建 CAN 控制器所需要的软硬件资源,并完成对应的引脚功能配置。CanInit(CAN1,pucCanArg,NULL); / 初始化 CAN 控制器 0(2) 设置中断响应函数在初始化 CAN 控制器之后,收发数据之前,应该使用 SetVICIRQ() 函数设置 CAN 中断响应函数。在 can.h 头文件中已经提供 CAN 的中断服务函数,只需要使 用 SetVICIRQ() 函数对其进行设置即
36、可。SetVICIRQ(CAN_IRQ_CHN,7,(uint32)Can_ISR); / 设置中断响应函数,优 先级 7(3) 发送数据数据的发送使用 CanWrite() 函数,以帧格式进行。 发送数据前, 需要根据 CAN 数据帧结构填写发送数据,然后使用 CanWrite() 函数将数据发送到 CAN 总线。CANINFO dat1; / 发送缓冲,大小为 1 帧/ 填充 CAN 发送数据, 扩展帧,数据长度为 8,/ 数据 0x11 0x22 0x33 0x44 0x55 0x66 0x77 0x88 0x99dat0.canrfs =FILFRAME(0X88,FRAME_DATA
37、,FRAME_EXT);/ 填充帧信息/ 数据dat0.canid =0x55; / 帧 IDdat0.candat0 =0x44332211;dat0.candat1 =0x88776655; / 数据CanWrite(CAN1,dat,1,NULL); / 发送 1 帧数据(4) 接收数据CAN 总线数据的接收通过 CanRead() 函数完成。CANINFO dat1; / 接收数据If(1 = CanRead(CAN1,dat,1,NULL) / 读 1 帧数据/数据处理4.2 VB 监控软件设计VB6.0 全称为 Visual Basic6.0 ,它是一种开发图形用户界面的基于 Ba
38、sic 的可 视化程序设计软件。在 Visual Basic 6.0 中,一方面继承了先辈 Basic 所具有的程 序语言简单易用的特点,另一方面在其编程系统中采用了面向对象、事件驱动的编 程机制,提供了一种所见即所得的可视化程序设计方法。通过 Visual Basic 提供的 MSComm 串行通信对象,可以很容易的编写相关的串 行通信程序如下:Private Sub Com_open_Click()On Error GoTo err1If MSComm1.PortOpen = True ThenMSComm1.PortOpen = FalseEnd IfIf Not MSComm1.Por
39、tOpen ThenMSComm1.CommPort = Com_port.Text通信口串口参数设置MSComm1.Handshaking = 0握手信号MSComm1.Settings = 9600,E,8,1MSComm1.PortOpen = TrueCom_fig.FillColor = QBColor(9)End IfExit Suberr1:MsgBox Err.DescriptionEnd Sub 其他部分程序这里不再一一介绍。根据实际要求可以制作如图 4-3 所示的窗体界面,添加好各个对象,分别对其 设置属性,然后编写代码,保存运行。本系统共二个阀,每个阀门的电机状态由圆 形
40、图标表示。监控画面的左边是相关的串口的打开与退出,数据采集的开始与停止 等的控制。图4-3监控界面结论再显示此次设计通过CAN总线与电液阀控制器通信, 实现远程控制阀门幵关。各阀门的相关信息与检测错误而发生警告,实现电液阀控制器的远程监控。本文介绍了船用智能阀门控制技术知识,与设计发展历程。中国的传统阀门技船用阀门控制器的设计 术与国外相差一定的技术含量。需要改变目前的状态必须不断的创新 ,但是,随 着经济和科学技术的不断发展,中国的阀门技术不断的朝更好的方向发展。在此次论文设计中,不仅培养了自己独立思考问题的能力,还学习了各种知识, 更加了解中国在船舶中重工业的发展,我会把此次学习到的运用到
41、生活与工作中, 以认真和踏实的态度完成好各项工作。致谢这次毕业设计得到了很多老师、同学和同事的帮助,其中我的导师浦灵敏老师对我的关心和支持尤为重要,每次遇到难题,我最先做的就是向浦灵敏老师寻求帮 助,而浦灵敏每次不管忙或闲,总会抽空来找我面谈,然后一起商量解决的办法。 另外,感谢校方给予我这样一次机会,能够独立地完成一个课题,并在这个过程当 中,给予我们各种方便,使我们在即将离校的最后一段时间里,能够更多学习一些 实践应用知识,增强了我们实践操作和动手应用能力,提高了独立思考的能力。再 一次对我的母校表示感谢。感谢在整个毕业设计期间和我密切合作的同学,和曾经在各个方面给予过我帮 助的伙伴们,在
42、大学生活即将结束的最后的日子里,我们再一次演绎了团结合作的 童话,把一个庞大的,从来没有上手的课题,圆满地完成了。正是因为有了你们的 帮助,才让我不仅学到了本次课题所涉与的新知识,更让我感觉到了知识以外的东 西,那就是团结的力量。最后,感谢所有在这次毕业设计中给予过我帮助的人。参考文献1 夏继强,刑春香,满庆丰,基于 CAN总线的阀门远程控制系统J;自动化仪表; 2004 年 07 期2 盛巍巍,吴建国,杜文静.基于CAN总线的船用阀门控制系统的设计J.工业控制计 算机,2010,23,8,36-37.3 李晋华,邱春玲,田地基于CAN总线数据采集系统的设计与实现J;吉林大学学报; 2004
43、年 02 期4 李家绪,徐爱钧,万天军.基于ARM7处理器的CAN总线网络设计J.现场总线与网 络技术, 2006,9:23-25.5 船用阀门 共和国阀门出版社 出版时间: 1978-02 周立功 丄PC2119/2129/2194/2292/2294使用指南M, eBook :周立功,20097 付秀霞,基于状态模型的CAN总线系统的仿真,J北京化工大学学报.8 Liang ZF,Xie X,Tang XQ.Design of the networked numerical control system based on industrial EthernetJ. Modern Manuf Eng 2006(1):38-40.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
