 最新可编程控制器作业
最新可编程控制器作业

《最新可编程控制器作业》由会员分享,可在线阅读,更多相关《最新可编程控制器作业(28页珍藏版)》请在装配图网上搜索。
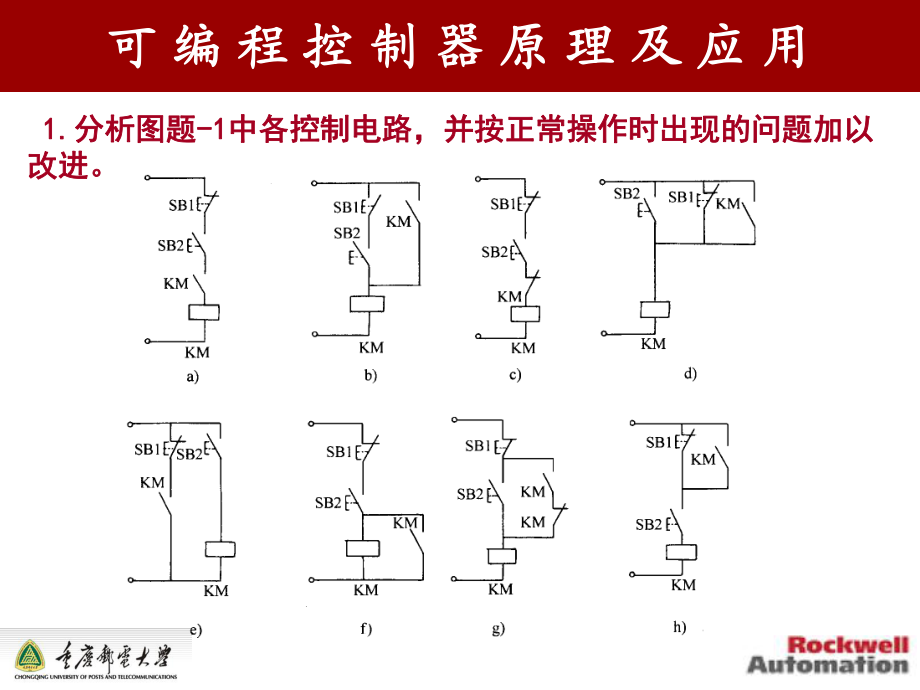
1、可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用 1. 1.分析图题分析图题-1-1中各控制电路,并按正常操作时出现的问题加以中各控制电路,并按正常操作时出现的问题加以改进。改进。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用2.2.试设计可以从两地操作的对一台电动机实现连续运转和点动工作的控制电试设计可以从两地操作的对一台电动机实现连续运转和点动工作的控制电路。路。3 3画出一个两台电动机画出一个两台电动机M1M1,M2M2的控制电路。要求的控制电路。要求M1M1,M2M2可以分别起动和停止,可以分别起动和停止,也可以同时起动和停止。也可以同时起动和停止。
2、4.4.某异步电动机单向运转,要求采用电抗器减压起动,试设计主电路和控制某异步电动机单向运转,要求采用电抗器减压起动,试设计主电路和控制电路。电路。 5.5.笼型异步电动机单向运转,要求起动时电流不能太大,制动时要快速停车,笼型异步电动机单向运转,要求起动时电流不能太大,制动时要快速停车,试设计主电路和控制电路。试设计主电路和控制电路。6.6.某笼型电动机正、反向运转,要求减压起动,快速停车,试设计主电路和某笼型电动机正、反向运转,要求减压起动,快速停车,试设计主电路和控制电路。控制电路。7.7.某机床主轴由一台笼型电动机拖动,润滑油泵由另一台笼型电动机拖动,某机床主轴由一台笼型电动机拖动,润
3、滑油泵由另一台笼型电动机拖动,均采用直接起动,工艺要求:均采用直接起动,工艺要求: (1 1)主轴必须在油泵开动后,才能起动;)主轴必须在油泵开动后,才能起动; (2 2)主轴正常为正向运转,但为调试方便,要求能正、反向点动;)主轴正常为正向运转,但为调试方便,要求能正、反向点动; (3 3)主轴停止后,才允许油泵停止;)主轴停止后,才允许油泵停止; (4 4)有短路、过载及零电压保护。)有短路、过载及零电压保护。 试设计主电路及控制电路。试设计主电路及控制电路。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用8.8.某水泵由笼型电动机拖动,采用减压起动,要求在某水泵由笼型电动
4、机拖动,采用减压起动,要求在3 3处都能控制起、停,试处都能控制起、停,试设计主电路及控制电路。设计主电路及控制电路。9.9.某升降台由一台笼型电动机拖动,直接起动,制动有电磁抱闸。要求:按某升降台由一台笼型电动机拖动,直接起动,制动有电磁抱闸。要求:按下起动按钮后先松闸,经下起动按钮后先松闸,经3S3S后电动机正向起动,工作台升起,再经后电动机正向起动,工作台升起,再经5S5S后,电后,电动机停止,电磁闸抱紧。试设计主电路及控制电路动机停止,电磁闸抱紧。试设计主电路及控制电路1010设计一小车运行控制电路,小车由异步电动机拖动。其动作程序如下:设计一小车运行控制电路,小车由异步电动机拖动。其
5、动作程序如下: (1 1)小车原位开始前进,到终端后自动停止。)小车原位开始前进,到终端后自动停止。 (2 2)在终端停)在终端停2 2分钟后自动返回原位,如此往复运动。分钟后自动返回原位,如此往复运动。 (3 3)要求在前进或后退途中任意位置都能停止或起动。)要求在前进或后退途中任意位置都能停止或起动。1111试设计一带有三个接触器的控制电路,控制要求如下:按下起动按钮后试设计一带有三个接触器的控制电路,控制要求如下:按下起动按钮后线圈线圈KM1KM1通电,通电,5 5秒后线圈秒后线圈KM2KM2通电,经通电,经1010秒后线圈秒后线圈KM2KM2释放,同时释放,同时KM3KM3线圈通电,线
6、圈通电,再经再经1515秒后,秒后,KM1KM1,KM3KM3线圈均释放。线圈均释放。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用12.12.设计一工作台前进设计一工作台前进退回控制线路。工作台由电动机退回控制线路。工作台由电动机M M带动,行程开关分带动,行程开关分别装在工作台的原位和终点。要求:别装在工作台的原位和终点。要求: (1 1)前进)前进后退停止到原位;后退停止到原位; (2 2)工作台到达终点后停一下再后退;)工作台到达终点后停一下再后退; (3 3)工作台在前进中能立即后退到原位;)工作台在前进中能立即后退到原位; (4 4)有终端保护。)有终端保护。13
7、13分别设计符合下述控制要求的控制电路,并画出运用分别设计符合下述控制要求的控制电路,并画出运用PLCPLC实现其控制要求实现其控制要求的输入输出接线图,编制梯形图程序。的输入输出接线图,编制梯形图程序。 (1 1)起动时,电动机)起动时,电动机 M1M1起动后,起动后,M2M2才能起动;停止时,才能起动;停止时,M2M2停止后停止后 M1M1才能停止。才能停止。 (2 2)电动机)电动机 M1M1先起动后,先起动后,M2M2才能起动,才能起动,M2M2能单独停车;能单独停车; (3 3)电动机)电动机 M1M1起动后,起动后,M2M2才能起动,才能起动,M2M2并能点动;并能点动; (4 4
8、)电动机)电动机M1M1先起动后,经过先起动后,经过l l分钟延时后电机分钟延时后电机M2M2能自行起动。能自行起动。 (5 5)电动机)电动机 M1M1先起动后,经过先起动后,经过3030秒延时后秒延时后 M2M2能自行起动,当能自行起动,当M2M2起动起动后后 M1M1立即停止。立即停止。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用1414扬声器生产中需对产品进行长期最大功率试验和短期最大功率试验。长扬声器生产中需对产品进行长期最大功率试验和短期最大功率试验。长期最大功率试验的方法是扬声器应能承受持续时间为期最大功率试验的方法是扬声器应能承受持续时间为1 1分钟,试验重
9、复分钟,试验重复1010次,次,所用信号的间隔为所用信号的间隔为2 2分钟,而不产生永久性损坏的最大功率。短期最大功率试分钟,而不产生永久性损坏的最大功率。短期最大功率试验的方法是扬声器应能承受持续时间为验的方法是扬声器应能承受持续时间为1 1秒,试验重复秒,试验重复6060次,所用信号的间隔次,所用信号的间隔为为6060秒,而不产生永久性损坏的最大功率。用秒,而不产生永久性损坏的最大功率。用PLCPLC同时对同时对7 7个扬声器进行测试,个扬声器进行测试,PLCPLC接通电源就自动进入测试试验(不需使用输入),试验指示灯亮;试验时接通电源就自动进入测试试验(不需使用输入),试验指示灯亮;试验
10、时间到,指示灯灭。试编写出其梯形图。间到,指示灯灭。试编写出其梯形图。 1515电动葫芦起升机构的动负荷试验控制要求如下:电动葫芦起升机构的动负荷试验控制要求如下: (1 1)可手动上升、下降。)可手动上升、下降。 (2 2)自动运行时,上升)自动运行时,上升6 6秒秒停停9 9秒秒下降下降6 6秒秒停停9 9秒,反复运行秒,反复运行1 1小小时后发出声光信号,并停止运行。时后发出声光信号,并停止运行。 试编制用试编制用PLCPLC实现上述控制要求的梯形图程序。实现上述控制要求的梯形图程序。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用16. 16. 在传送线上有在传送线上有
11、4 4节传送带,由节传送带,由M1M1M4M4四台电动机驱动,如图题四台电动机驱动,如图题-3-3所示。所示。为了节省能源,要求只有当某一节传送带上有产品时开动,而没有产品时那为了节省能源,要求只有当某一节传送带上有产品时开动,而没有产品时那些传送带则停止不动。当产品在传送带时,光电开关些传送带则停止不动。当产品在传送带时,光电开关PHPH检测到即发出信号,检测到即发出信号,使该传送带工作。当产品快到下一节传送带时,超出光电开关的检测范围,使该传送带工作。当产品快到下一节传送带时,超出光电开关的检测范围,延时延时3 3秒后,这一个传送带就停止工作。用秒后,这一个传送带就停止工作。用PLCPLC
12、对传送带进行控制,编写满足对传送带进行控制,编写满足要求的梯形图程序。要求的梯形图程序。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用1717设计一个十字路口交通指挥灯控制系统,其示意图如图题设计一个十字路口交通指挥灯控制系统,其示意图如图题-4a-4a所示。具体所示。具体控制要求是:设置一个控制开关,当它闭合时,信号灯系统按图题控制要求是:设置一个控制开关,当它闭合时,信号灯系统按图题-4b-4b所示时所示时序循环运行;当它断开时,信号灯全部熄灭。试画出输入输出设备与序循环运行;当它断开时,信号灯全部熄灭。试画出输入输出设备与PLCPLC的接的接线图,并用多种方式设计梯形图
13、程序。线图,并用多种方式设计梯形图程序。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用18.18.为了限制绕线式异步电动机的起动电流,在其转子电路中串入电阻,如图为了限制绕线式异步电动机的起动电流,在其转子电路中串入电阻,如图题题-5-5所示。起动时接触器所示。起动时接触器KM1KM1合上,串上整个电阻合上,串上整个电阻R1R1;起动;起动2 2秒后,秒后,KM4KM4接通,接通,短接转子回路的一段电阻,剩下短接转子回路的一段电阻,剩下R2R2;又经过;又经过1 1秒后,秒后,KM3KM3接通,电阻改为接通,电阻改为R3R3;再;再过过0.50.5秒秒KM2KM2也合上也合上
14、, ,转子外接电阻全部短接转子外接电阻全部短接, ,起动过程完毕。试编制用起动过程完毕。试编制用PLCPLC实现实现上述控制要求的梯形图程序。上述控制要求的梯形图程序。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用1919液压动力滑台是完成进给运动的部件,图题液压动力滑台是完成进给运动的部件,图题a a是工艺流程图,图题是工艺流程图,图题b b为其为其二次工进元件示意图,工作循环如图题二次工进元件示意图,工作循环如图题c c。请用多种方法设计既能单周工作,。请用多种方法设计既能单周工作,又能自动循环的又能自动循环的PLCPLC控制梯形图程序。控制梯形图程序。可可 编编 程程
15、控控 制制 器器 原原 理理 及及 应应 用用 20.20.送料车运行如图所示,该车由电动机拖动,电送料车运行如图所示,该车由电动机拖动,电动机正转,车子前进,电动机反转,车子后退。动机正转,车子前进,电动机反转,车子后退。对送料车的控制要求是:对送料车的控制要求是: (1 1)单周工作方式:每按动送料按钮,预先装满)单周工作方式:每按动送料按钮,预先装满料的车子便自动前进,到达卸料处(料的车子便自动前进,到达卸料处(SQ2SQ2)自动停)自动停下来卸料,经延时下来卸料,经延时t1t1时间后,卸料完毕,车子自时间后,卸料完毕,车子自动返回装料处(动返回装料处(SQ1SQ1),装满料待命。再按动
16、送料),装满料待命。再按动送料按钮,重复上述过程。按钮,重复上述过程。 (2 2)自动循环方式:要求车子在装料处装满料后)自动循环方式:要求车子在装料处装满料后就自动前进送料,即延时就自动前进送料,即延时t2t2秒装满料后,车子不秒装满料后,车子不需等按动送料按钮,车子再次前进,重复上述过需等按动送料按钮,车子再次前进,重复上述过程,实现送料车自动送料。程,实现送料车自动送料。试用试用PLCPLC对车子进行控制,编制满足要求的程序。对车子进行控制,编制满足要求的程序。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用 21.21.已知纵横油缸液压进给加工控制电路设计时的工作循环如
17、图题已知纵横油缸液压进给加工控制电路设计时的工作循环如图题a a所示,所示,试用多种方法设计试用多种方法设计PLCPLC控制梯形图控制梯形图可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用 22 22控制系统参数越限或发生故障时报警系统按图所示工作:有报警信号时控制系统参数越限或发生故障时报警系统按图所示工作:有报警信号时应使报警指示灯发出闪光,同时蜂鸣器发出音响;运行人员按下确认按钮后,应使报警指示灯发出闪光,同时蜂鸣器发出音响;运行人员按下确认按钮后,报警指示灯由闪光转为平光,同时蜂鸣器停止音响;系统参数恢复正常值或报警指示灯由闪光转为平光,同时蜂鸣器停止音响;系统参数恢复
18、正常值或故障排除后报警指示灯熄灭。为了确保系统显示可靠还应装设试灯按钮用以故障排除后报警指示灯熄灭。为了确保系统显示可靠还应装设试灯按钮用以检查报警灯是否完好。编制满足上述控制要求的程序并调试。检查报警灯是否完好。编制满足上述控制要求的程序并调试。 可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用2323闪光灯控制系统如图题所示,控制要闪光灯控制系统如图题所示,控制要求如下:求如下: (1 1)隔灯闪烁:)隔灯闪烁:L3L3、L5L5、L7L7、L9L9亮亮1s1s后灭,接着后灭,接着L2L2、L4L4、L6L6、L8L8亮亮1s1s后灭,周后灭,周而复始循环;而复始循环; (
19、2 2)隔两灯闪烁:)隔两灯闪烁:L1L1、L4L4、L7L7亮亮1s1s后灭,后灭,接着接着L2L2、L3L3、L4L4亮亮2s2s后灭,接着后灭,接着L6L6、L7L7、L8L8亮亮1s1s后灭,周而复始循环;后灭,周而复始循环; (3 3)发射型闪烁:)发射型闪烁:L1L1亮亮2s2s后灭,接着后灭,接着L2L2、L5L5、L7L7、L9L9亮亮1s1s后灭,接着后灭,接着L2L2、L4L4、L6L6、L8L8亮亮2s2s后灭,周而复始循环;后灭,周而复始循环; 分别画出符合以上三种控制方案的时序分别画出符合以上三种控制方案的时序图并编制程序。图并编制程序。可可 编编 程程 控控 制制
20、器器 原原 理理 及及 应应 用用24.24.水塔水位控制系统如图所示,水塔水位控制系统如图所示,S1S1S4S4为液位传感器,液面淹没时接通。系为液位传感器,液面淹没时接通。系统控制要求如下:当水池水位低于统控制要求如下:当水池水位低于S4S4时,电磁阀时,电磁阀Y Y打开进水,当水位升至打开进水,当水位升至S3S3时,时,电磁阀关闭停止进水;此时,若水塔水位低于电磁阀关闭停止进水;此时,若水塔水位低于S2S2,则电机,则电机M M开始运转抽水,当开始运转抽水,当水塔水位升至水塔水位升至S1S1时,电机时,电机M M停止运转。编制满足上述控制要求的程序并调试。停止运转。编制满足上述控制要求的
21、程序并调试。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用2525三种液体自动混合加热的控制系统如图所示。图中三种液体自动混合加热的控制系统如图所示。图中T T为温度传感器,为温度传感器,L1L1L3L3分别为高、中、低液位传感器,液面淹没时接通。初始状态各阀门均关闭,分别为高、中、低液位传感器,液面淹没时接通。初始状态各阀门均关闭,电动机、加热器均停止。(电动机、加热器均停止。(1 1)起动操作:按下起动按钮,系统开始运行。)起动操作:按下起动按钮,系统开始运行。 阀门阀门Y1Y1、Y2Y2同时打开向容器内注入同时打开向容器内注入A A、B B液体,当液面升至中水位时,液体
22、,当液面升至中水位时,L2L2接通。此时关闭阀门接通。此时关闭阀门Y1Y1、Y2Y2,打开阀门,打开阀门Y3Y3,向容器注入,向容器注入C C液体。液体。 当液面升至高水位时,当液面升至高水位时,L1L1接通,关闭阀门接通,关闭阀门Y3Y3,电动机,电动机M M起动开始搅起动开始搅拌。拌。 经经10s10s搅匀后,电动机搅匀后,电动机M M停止搅拌,加热器停止搅拌,加热器H H开始加热。开始加热。 当混合液温度到达指定值时,温度传感器当混合液温度到达指定值时,温度传感器T T发出信号停止加热,并打发出信号停止加热,并打开电磁阀开电磁阀Y4Y4,开始放出混合液体。,开始放出混合液体。 当液面下降
23、至低于当液面下降至低于L3L3时,经时,经5s5s后电磁阀后电磁阀Y4Y4关闭,同时阀门关闭,同时阀门Y1Y1、Y2Y2打开打开开始下一周期运行。开始下一周期运行。 (2 2)停止操作:按下停止按钮,在当前的混合操作处理完毕后,才停)停止操作:按下停止按钮,在当前的混合操作处理完毕后,才停止运行(停在初始状态上)。止运行(停在初始状态上)。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用 26.26.自动送料装车系统如图题所示。图中自动送料装车系统如图题所示。图中S1S1为货仓料位传感器,为货仓料位传感器,料满时料
24、满时S1S1为接通状态;为接通状态;S2S2为称重传感器,站内有车时为称重传感器,站内有车时S2S2接通,站接通,站内汽车装满货内汽车装满货S2S2断开;断开;L1L1、L2L2分别为表示货满后允许汽车出站和分别为表示货满后允许汽车出站和允许汽车进站装货的指示灯。初始状态时站内无车允许汽车进站装货的指示灯。初始状态时站内无车S2S2断开(断开(L1L1灭、灭、L2L2亮);进料开关亮);进料开关K1K1、K2K2关闭;电动机关闭;电动机M1M1M3M3不运转。当汽车进不运转。当汽车进站后站后S2S2接通(接通(L1L1亮、亮、L2L2灭);若此时货仓料不满(灭);若此时货仓料不满(S1S1断)
25、则打开断)则打开进料开关进料开关K1K1向货仓进料,料满后(向货仓进料,料满后(S1S1通)断开进料开关通)断开进料开关K1K1;在;在K1K1打开进料的同时打开进料的同时M3M3、M2M2、M1M1每隔每隔2s2s依次开始运行;进料开关依次开始运行;进料开关K2K2在在M1M1运行运行2s2s后打开出料,汽车料满后后打开出料,汽车料满后S2S2断开,进料开关断开,进料开关K2K2关闭,关闭,2s2s后后M1M1、 M2M2、M3M3每隔每隔2s2s依次停止运行;此后依次停止运行;此后L2L2亮、亮、L1L1灭,表示汽灭,表示汽车可以开走。用不同的方法编制满足上述控制要求的程序并调试车可以开走
26、。用不同的方法编制满足上述控制要求的程序并调试。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用27.27.自动装箱生产线控制如图所示,系统控制要求如下:自动装箱生产线控制如图所示,系统控制要求如下: (1 1)按)按SB1SB1起动系统,传送带起动系统,传送带2 2开始运行,当箱子进入定位开始运行,当箱子进入定位位置时位置时SQ2SQ2动作,传送带动作,传送带2 2停止。停止。 (2 2)SQ2SQ2动作后动作后1s1s,起动传送带,起动传送带1 1;物品随传送带;物品随传送带1 1运动逐运动逐一落入箱内,并由一
27、落入箱内,并由SQ1SQ1检测,即每当落入一个物品,检测,即每当落入一个物品,SQ1SQ1发出一个发出一个脉冲信号。脉冲信号。 (3 3)当落入箱内物品达)当落入箱内物品达1010个,传送带个,传送带1 1停止,同时起动传停止,同时起动传送带送带2 2 (4 4)按下停止按钮,传送带)按下停止按钮,传送带1 1和传送带和传送带2 2均停止。均停止。 用不同的方法编制符合上述控制要求的程序并调试。用不同的方法编制符合上述控制要求的程序并调试。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用28.28.某生产自动线如图
28、所示,有一小车用电机拖动,电机正传,某生产自动线如图所示,有一小车用电机拖动,电机正传,小车前进,电机反转,小车后退。要求在第一次信号来后小车前小车前进,电机反转,小车后退。要求在第一次信号来后小车前进,碰到限位开关进,碰到限位开关A A后退,退到原位后退,退到原位O O就停止;当第二次信号来后就停止;当第二次信号来后再前进,碰到限位开关再前进,碰到限位开关B B后退,退到原位后退,退到原位O O才停止;当第三次信号才停止;当第三次信号来后又前进,碰到限位开关来后又前进,碰到限位开关C C后退,退到原位后退,退到原位O O才停止;第四次信才停止;第四次信号来后,又前进,碰到限位开关号来后,又前
29、进,碰到限位开关D D后退,直退到原位后退,直退到原位O O才停止。第才停止。第五次信号来后,又和第一次信号来时情况一样,碰到限位开关五次信号来后,又和第一次信号来时情况一样,碰到限位开关A A后就后退,如此循环往复。上述动作过程如图后就后退,如此循环往复。上述动作过程如图2121所示。使用所示。使用PLCPLC实现上述要求,编出其程序。实现上述要求,编出其程序。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用29.在醋酸生产装置中利用原料乙醛氧化生成醋酸的控制系统如在醋酸生产装置中利用原料乙醛氧化生成醋酸的控制系
30、统如图题图题-17所示。为了保证生产正常进行,乙醛和氧气的流量设有所示。为了保证生产正常进行,乙醛和氧气的流量设有比值调节。但一旦塔中氧气含量过高有可能发生爆炸,因而工艺比值调节。但一旦塔中氧气含量过高有可能发生爆炸,因而工艺条件要求第一氧化塔、第二氧化塔塔顶氧含量超过条件要求第一氧化塔、第二氧化塔塔顶氧含量超过5%时分别打时分别打开氮气进料阀,向塔内通入氮气。当第一氧化塔氧含量超过开氮气进料阀,向塔内通入氮气。当第一氧化塔氧含量超过10%时要求切断乙醛和氧气的进料阀。为了保证连锁系统工作可靠,时要求切断乙醛和氧气的进料阀。为了保证连锁系统工作可靠,对第一氧化塔设置了三套氧分析器对第一氧化塔设
31、置了三套氧分析器AR1、AR2、AR3。当其中任。当其中任意一台达到意一台达到5%时都可使电磁阀时都可使电磁阀YV1动作;而当其中任意二台达动作;而当其中任意二台达到到10%时都可使电磁阀时都可使电磁阀YV2、YV3动作。此外为了保证塔底的氧动作。此外为了保证塔底的氧化液得到足够的冷却,当第一氧化塔塔底循环泵化液得到足够的冷却,当第一氧化塔塔底循环泵P1、P2、P3都都停运时,同样应打开氮气阀并切断乙醛阀和氧气阀。停运时,同样应打开氮气阀并切断乙醛阀和氧气阀。P4、P5泵泵都停运也打开氮气阀。都停运也打开氮气阀。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用可可 编编 程程
32、控控 制制 器器 原原 理理 及及 应应 用用 30. 30.某工厂有一油循环系统,如图所示。控制要求如下:某工厂有一油循环系统,如图所示。控制要求如下: (1 1)当起动按钮)当起动按钮SB1SB1按下时,泵按下时,泵1 1、泵、泵2 2通电运行,由泵通电运行,由泵1 1将油从循环槽打入淬火槽,经沉淀槽,再由泵将油从循环槽打入淬火槽,经沉淀槽,再由泵2 2打入循环槽,运打入循环槽,运行行1515分钟后,泵分钟后,泵1 1、泵、泵2 2停。停。 (2 2)在泵)在泵1 1、泵、泵2 2运行期间,当沉淀槽液位到达高液位时,运行期间,当沉淀槽液位到达高液位时,液位传感器液位传感器SL1SL1接通,
33、此时泵接通,此时泵1 1停,泵停,泵2 2继续运行继续运行1 1分钟。分钟。 (3 3)在泵)在泵1 1、泵、泵2 2运行期间,当沉淀槽液位到达低液位时,运行期间,当沉淀槽液位到达低液位时,液位传感器液位传感器SL2SL2由接通变为断开,泵由接通变为断开,泵2 2停,泵停,泵1 1继续运行继续运行1 1分钟。分钟。 (4 4)当停止按钮)当停止按钮SB2SB2按下时,泵按下时,泵1 1、泵、泵2 2停。停。 根据上述控制要求编写出梯形图程序并调试。根据上述控制要求编写出梯形图程序并调试。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用可可 编编 程程 控控 制制 器器 原原 理
34、理 及及 应应 用用 31. 31.有一生产流水线,如图所示,传送带的主动轮上装有脉冲发有一生产流水线,如图所示,传送带的主动轮上装有脉冲发生器生器LSLS,(转一圈产生一个脉冲)作为物品发送检测,每发送一,(转一圈产生一个脉冲)作为物品发送检测,每发送一个物品,发出一个脉冲。光电检测器个物品,发出一个脉冲。光电检测器PH1PH1能对传送带上的次品进能对传送带上的次品进行检测并给出信号,当次品在传送带上继续往前走,到行检测并给出信号,当次品在传送带上继续往前走,到4 4号位置号位置时应使电磁阀时应使电磁阀YVYV通电,把挡板打开,当光电开关通电,把挡板打开,当光电开关PH2PH2检测出次品检测出次品已跌落时,给出信号,让电磁阀断电,挡板关闭,正品则到已跌落时,给出信号,让电磁阀断电,挡板关闭,正品则到7 7号号位置时落入规定的箱中。光电开关位置时落入规定的箱中。光电开关PH3PH3可作为规定装箱件数计数。可作为规定装箱件数计数。根据上述控制要求编写出梯形图程序并调试。根据上述控制要求编写出梯形图程序并调试。可可 编编 程程 控控 制制 器器 原原 理理 及及 应应 用用
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
