 振动理论课后题部分汇总
振动理论课后题部分汇总

《振动理论课后题部分汇总》由会员分享,可在线阅读,更多相关《振动理论课后题部分汇总(44页珍藏版)》请在装配图网上搜索。
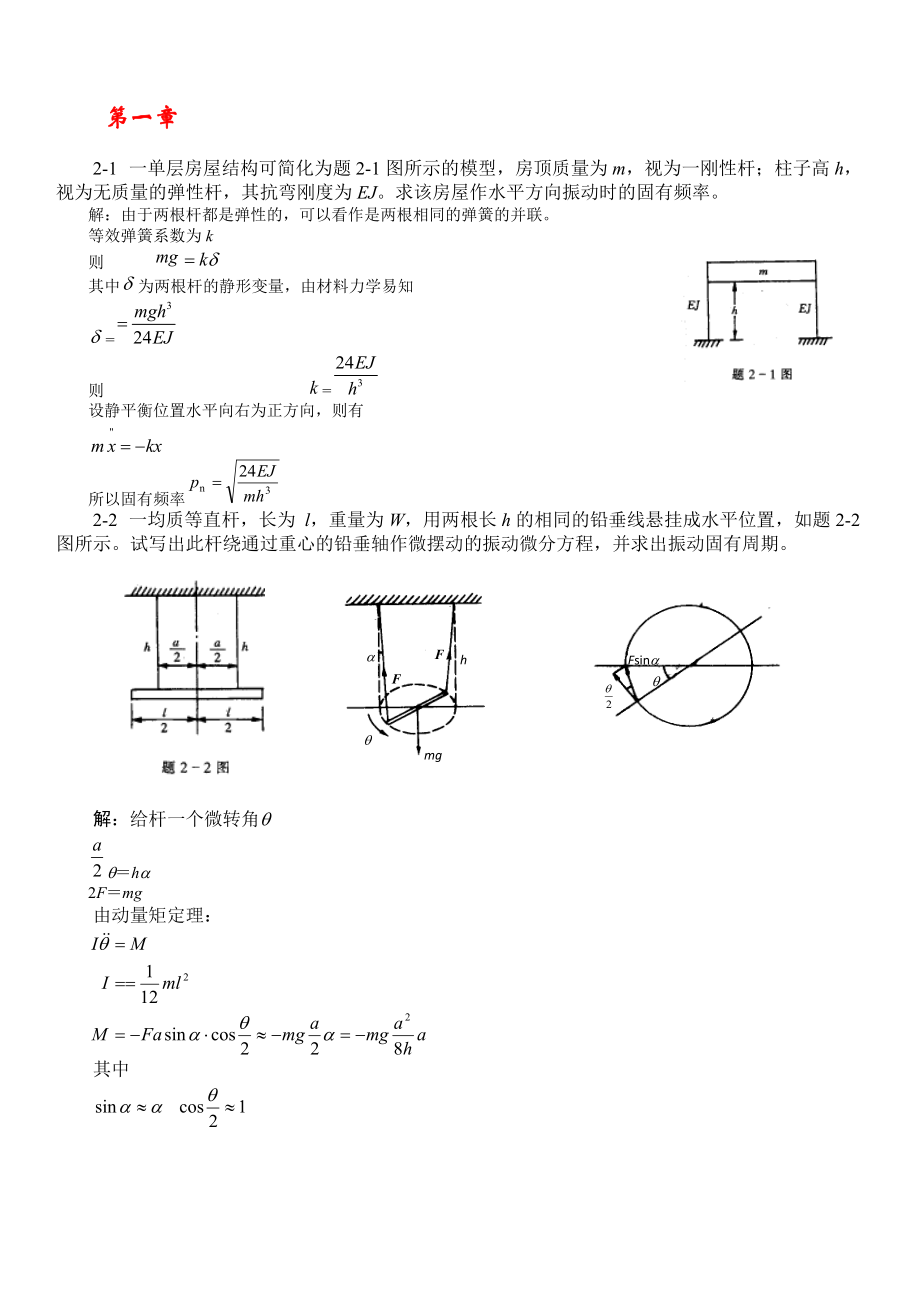
1、第一章2-1 一单层房屋结构可简化为题2-1图所示的模型,房顶质量为m,视为一刚性杆;柱子高h,视为无质量的弹性杆,其抗弯刚度为EJ。求该房屋作水平方向振动时的固有频率。解:由于两根杆都是弹性的,可以看作是两根相同的弹簧的并联。等效弹簧系数为k则 其中为两根杆的静形变量,由材料力学易知=则 =设静平衡位置水平向右为正方向,则有所以固有频率qFsinaaFhmgqF2-2 一均质等直杆,长为 l,重量为W,用两根长h的相同的铅垂线悬挂成水平位置,如题2-2图所示。试写出此杆绕通过重心的铅垂轴作微摆动的振动微分方程,并求出振动固有周期。解:给杆一个微转角qqha2Fmg由动量矩定理:其中2-3 求
2、题2-3图中系统的固有频率,悬臂梁端点的刚度分别是和,悬臂梁的质量忽略不计。解:悬臂梁可看成刚度分别为k1和k3的弹簧,因此,k1与k2串联,设总刚度为k1。k1与k3并联,设总刚度为k2。k2与k4串联,设总刚度为k。即为,2-4求题2-4图所示的阶梯轴一圆盘系统扭转振动的固有频率。其中、和是三个轴段截面的极惯性矩,I是圆盘的转动惯量,各个轴段的转动惯量不计,材料剪切弹性模量为G。解: (1) (2) (3) (4)2-4 如题2-5图所示,质量为的均质圆盘在水平面上可作无滑动的滚动,鼓轮绕轴的转动惯量为I,忽略绳子的弹性、质量及个轴承间的摩擦力,求此系统的固有频率。解:此系统是一个保守系统
3、,能量守恒系统的动能为:系统的势能为:总能量由于能量守恒消去得系统的运动方程为:系统的固有频率为:2-5 如题2-6图所示,刚性曲臂绕支点的转动惯量为,求系统的固有频率。解:设曲臂顺时针方向转动的角为广义坐标,系统作简谐运动,其运动方程为。很小,系统的动能为所以,OmgjXOYOFKFC取系统平衡位置为势能零点。设各弹簧在静平衡位置伸长为,由, (A)由题意可知,系统势能为(B)将(A)式代入(B)式,可得系统最大势能为,由, 得 所以,有2-6 一个有阻尼的弹簧-质量系统,质量为10 kg,弹簧静伸长是1cm,自由振动20个循环后,振幅从0.64 cm减至0.16cm,求阻尼系数c。解:振动
4、衰减曲线得包络方程为:振动20个循环后,振幅比为:代入,得:又 c = 6.9 N s /m,2-7 一长度为l、质量为m的均质刚性杆铰接于O点并以弹簧和粘性阻尼器支承,如题2-8图所示。写出运动微分方程,并求临界阻尼系数和阻尼固有频率的表达式。解:图(1)为系统的静平衡位置,画受力图如(2)。由动量矩定理,列系统的运动微分方程为:当npn时,ccC2-8 如题2-9图所示的系统中,刚杆质量不计,试写出运动微分方程,并求临界阻尼系数及固有频率。解:2-9 如题2-10图所示,质量为2000 kg的重物以3 cm/s的速度匀速运动,与弹簧及阻尼器相撞后一起作自由振动。已知k =48020 N/m
5、,c =1960 Ns/m,问重物在碰撞后多少时间达到最大振幅?最大振幅是多少?解:以系统平衡位置为坐标原点,建立系统运动微分方程为所以有 +x =0其特征方程为:+r+=0 r =-0.494.875i所以:x =cos4.875t+sin4.875t由于n pn,由已知条件,m/s。故通解为:其中,。(代入初始条件,当t=0时,x=0, =0当t=0时,=0,=0.006x=0.006sin4.875t=0.006(-0.49) sin4.875t+0.0064.875cos4.875当=0时,振幅最大,此时t=0.03s。当t=0.03s时,x=0.005m)代入初始条件,得,得物体达到
6、最大振幅时,有既得t = 0.30 s时,物体最大振幅为 cm2-10 由实验测得一个系统的阻尼固有频率为,在简谐激振力作用下出现最大位移值的激振频率为,求系统的无阻尼固有频率、相对阻尼系数及对数衰减率。解:, , ;三个方程联立,解得:第二章2-1已知系统的弹簧刚度k =800 N/m,作自由振动时的阻尼振动周期为1.8s,相邻两振幅的比值,若质量块受激振力N的作用,求系统的稳态响应。解:由题意,可求出系统的运动微分方程为得到稳态解其中由 又有所以x1.103 cos(3t5127)2-2一个无阻尼弹簧质量系统受简谐激振力作用,当激振频率rad/s时,系统发生共振;给质量块增加1 kg的质量
7、后重新试验,测得共振频率rad/s,试求系统原来的质量及弹簧刚度。解:设原系统的质量为m,弹簧常数为k由,共振时所以 又由 当与联立解出m20.69 kgk744.84 N/m2-3总质量为W的电机装在弹性梁上,使梁产生静挠度,转子重Q,重心偏离轴线e,梁重及阻尼可以不计,求转速为时电机在垂直方向上稳态强迫振动的振幅。解:列出平衡方程可得:所以:又因为即为所求的振幅2-4如题2-4图所示,作用在质量块上的激振力,弹簧支承端有运动,写出系统的运动微分方程,并求稳态振动。解:选时物块平衡位置为坐标原点O,建立坐标系,如右图,则 即 即 (*)改成,下面也都一样利用复数求解 , 用 代换sinwt
8、并设方程(*)的解为这里求的是特解,也就是稳态解。 代入方程(*)得其中B为振幅,为响应与激励之间的相位差,有=。 其中 2-5如题2-5图的弹簧质量系统中,两个弹簧的连接处有一激振力,求质量块的振幅。解:设弹簧1,2的伸长分别为x1和x2,则有, (A)由图(1)和图(2)的受力分析,得到 (B) (C)联立解得,所以,n = 0,得,2-6在题2-6图示的系统中,刚性杆AB的质量忽略不计,B端作用有激振力,写出系统运动微分方程,并求下列情况中质量m作上下振动的振幅值(1)系统发生共振;(2)等于固有频率的一半。 解:图(1)为系统的静平衡位置,以q为系统的广义坐标,画受力如图(2)又 Im
9、l2则mgqBP0sinwtAXAYAFCFK1)系统共振,即2)2-7写出题2-7图示系统的运动微分方程,并求系统固有频率、阻尼比及稳态响应振幅。 解:以刚杆转角为广义坐标,由系统的动量矩定理即 令,得到2-8一机器质量为450kg,支承在弹簧隔振器上,弹簧静变形为0.5cm。机器有一偏心重,产生偏心激振力N,其中是激励频率,g是重力加速度。求(1)在机器转速为1200 r/min时传入地基的力;(2)机器的振幅。解:设系统在平衡位置有位移,则即又有 则(1)所以机器的振幅为(2)且,(3)又有(4)将(1)(2)(4)代入(2)得机器的振幅=0.584 mm则传入地基的力为2-9一个粘性阻
10、尼系统在激振力作用下的强迫振动力为,已知N,B =5 cm ,rad/s,求最初1秒及1/4秒内,激振力作的功及。2-12无阻尼系统受题2-12图示的外力作用,已知,求系统响应。解:由图得激振力方程为当 0 t t1时,则有 由于,所以有当t1 t t2时,则有当 t t2时,则有+ 02-13如题2-13图的系统,基础有阶跃加速度,初始条件为 ,求质量m的相对位移。解:由牛顿定律,可得系统的微分方程为令,则有得到系统的激振力为,可得响应为其中,。2-16 零初始条件的无阻尼系统受题2-16图的外力作用,求系统响应。解:由图得激振力方程为当 0 t t1时,则有当t1 t t2时,则有当 t
11、t2时,则有 + 02-19无阻尼系统的支承运动加速度如题2-19图所示,求零初始条件下系统的相对位移。解:系统运动的微分方程为令,则由图得支承运动加速度方程为 当 0 t t1时,则有2-20 求零初始条件的无阻尼系统对题2-20图所示支承运动的响应。解:系统运动的微分方程为由图得支承运动方程为当 0 t t1时,则有当 t 解得:5-4 用邓克莱法求题4-5系统的基频。题4-5图解:按材料力学挠度公式,则有,由邓克莱公式得题4-7图5-5 用邓克莱法求题4-7系统的基频。解:由材料力学知,同理:由邓克莱法知:解之得:5-6 用矩阵迭代法计算题4-5系统的固有频率和主振型。题4-5图解:由材
12、料力学的知识得柔度矩阵为可得到动力矩阵:对初始假设矩阵进行迭代 与之对应的第一阶主振型:下面是求第二阶主频率和主振型:经过6次迭代,下面是求第二阶主频率和主振型:经过1次迭代,题4-8图5-8 用矩阵迭代法计算题4-8系统的固有频率和主振型。解:如图选择广义坐标。求质量矩阵及利用刚度影响系数法求刚度矩阵为,可得动力矩阵D=设初始假设振型=进行迭代 经过一次迭代后 得=由于所以 即与之对应的第一阶主振型为又由于所以可得含清除矩阵的动力矩阵选取初始假设振型=第二次迭代 =由于所以 所以与之对应的第二阶主振型为=由于6m所以可得动力矩阵假设=第二次迭代由于所以所以所以第三阶振型为综上所得可以写出主振
13、型固有频率为, 第六章6-2 求下列情况中当轴向常力突然移去时两端固定的等直杆的自由振动(1) 常力F作用于杆的中点,如题6-2(a) 图所示;(2) 常力F作用于杆的三分之一点处,如题6-2(b) 图所示;(3) 两个大小相等、方向相反的常力F作用于杆的四分之一点及四分之三点处如题图6-2(c)所示。解:(1) 根据题意 ,时杆内的应变杆的初始条件为因为干两端固定,可解得固有频率及主振型为将主振型代入归一化条件,得得到正则振型得到以正则坐标表示的初始条件为得到以正则坐标表示的对初始条件的响应于是杆的自由振动(2) 根据题意 ,时杆内的应变杆的初始条件为因为干两端固定,可解得固有频率及主振型为
14、将主振型代入归一化条件,得得到正则振型得到以正则坐标表示的初始条件为得到以正则坐标表示的对初始条件的响应于是杆的自由振动(3) 根据题意 ,时杆内的应变杆的初始条件为因为干两端固定,可解得固有频率及主振型为将主振型代入归一化条件,得得到正则振型得到以正则坐标表示的初始条件为得到以正则坐标表示的对初始条件的响应于是杆的自由振动题6-3图6-3 如题6-3图所示,一端固定一端自由的等直杆受到均匀分布力的作用,求分布力突然移去时杆的响应。解:t-=0时的应变为杆的初始条件为一端自由一端固定,可知杆的因有频率和主振型为将主振型代入上式归一化为以正则坐标表示初始条件为以正则坐标表示对初始条件的响应为于是
15、杆的自由振动为杆左端固定端,右端为自由端边界条件 得固有频率,主振型 i=1,2,杆在x处的应变初始条件由得再利用三角函数正交性得6-4 假定一轴向常力F突然作用于题6-2的等直杆的中点处,初始时刻杆处于静止平衡状态,求杆的响应。解:由题意知,边界条件为由此解出固有频率将主振型代入归一化条件,得得到正则振型由因为为集中力,不是分布力所以由上式得稳态响应(i=1,2,3)6-5 假定题6-3的等直杆上作用有轴向均匀分布的干扰力,求该杆的稳态强迫振动。解:因为杆是一端固定,可得固有频率和主振型为将主振型代入归一化条件,得得到正则振型又第i个正则方程为所以可得正则坐标的稳态响应为杆的稳态响应振动为其
16、中。6-6 一根两端自由的等直杆,中央作用有一轴向力,其中、为常数,假设起初杆处于静止,求杆的响应。解: 由题意知,边界条件为 有这些边界条件得,所以 所以 由 所以 所以 由 由于集中力,而非分布力所以 ,因为是在中央作用力,所以所以 ,由上式求得稳态响应 当时,当时,所以题6-7图6-7 一根等直圆轴的两端连接着两个相同的圆盘,如题6-7图所示,已知轴长l,轴及圆盘对轴中心线的转动惯量分别为及,求系统扭转振动的频率方程。解:()设代入运动微分方程得上式的解可表示为其边界条件当x=0时, 当x=l时, U(0)=U( l ) , 其中 6-8 题6-8图中的等直圆轴一端固定,另一端和扭转弹簧
17、相连,已知轴的抗扭刚度为,质量密度为,长度为l,弹簧的扭转刚度为,求系统扭转的频率方程。题6-8图 ()设代入运动微分方程得:上式的解可表示为 (a)其边界条件为 ,在处 (b)将(b)中第一式代入(a)得: (c)将(b)中第二式代入(a)得: , 其中 6-9 写出题6-9图所示系统的纵向振动频率方程,并写出主振型的正交性表达式。解:边界条件为: 由得,由条件(2)得 所以 这就是我们所要求的频率方程所以主振型关于质量的正交性主振型关于刚度的正交性为解: 该题中杆的振动方程为:其中由于边界条件中U(0)=0代入U(x)中得C=0再将U(x)代入中 ,由知:=再由边界知:EA得:即: 已知方程由乘并对杆积分得所以由得:所以,其解为正交。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
