 上料机械手的设计及Inventor运动仿真
上料机械手的设计及Inventor运动仿真

《上料机械手的设计及Inventor运动仿真》由会员分享,可在线阅读,更多相关《上料机械手的设计及Inventor运动仿真(23页珍藏版)》请在装配图网上搜索。
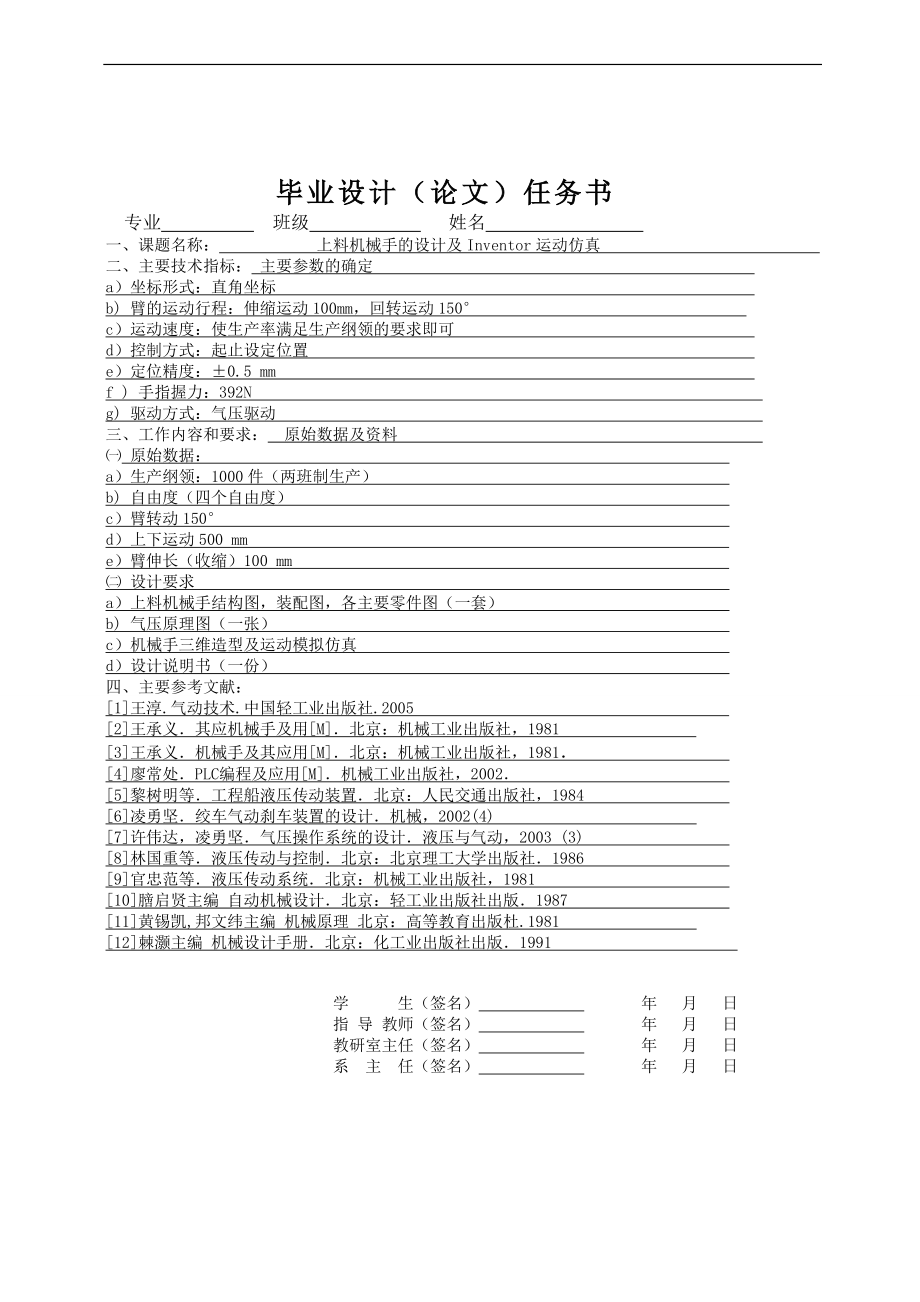
1、 毕业设计(论文)报告毕业设计(论文)任务书专业 班级 姓名 一、课题名称: 上料机械手的设计及Inventor运动仿真 二、主要技术指标: 主要参数的确定 a)坐标形式:直角坐标 b) 臂的运动行程:伸缩运动100mm,回转运动150 c)运动速度:使生产率满足生产纲领的要求即可 d)控制方式:起止设定位置 e)定位精度:0.5 mm f ) 手指握力:392N g) 驱动方式:气压驱动 三、工作内容和要求: 原始数据及资料 原始数据:a)生产纲领:1000件(两班制生产)b) 自由度(四个自由度)c)臂转动150d)上下运动500 mm e)臂伸长(收缩)100 mm 设计要求a)上料机械
2、手结构图,装配图,各主要零件图(一套)b) 气压原理图(一张)c)机械手三维造型及运动模拟仿真d)设计说明书(一份)四、主要参考文献:1王淳.气动技术.中国轻工业出版社.2005 2王承义其应机械手及用M北京:机械工业出版社,1981 3王承义机械手及其应用M北京:机械工业出版社,19814廖常处PLC编程及应用M机械工业出版社,20025黎树明等工程船液压传动装置北京:人民交通出版社,19846凌勇坚绞车气动刹车装置的设计机械,2002(4)7许伟达,凌勇坚气压操作系统的设计液压与气动,2003 (3)8林国重等液压传动与控制北京:北京理工大学出版社19869官忠范等液压传动系统北京:机械工
3、业出版社,198110膪启贤主编 自动机械设计北京:轻工业出版社出版198711黄锡凯,邦文纬主编 机械原理 北京:高等教育出版杜.198112棘灏主编 机械设计手册北京:化工业出版社出版1991 学 生(签名) 年 月 日 指 导 教师(签名) 年 月 日 教研室主任(签名) 年 月 日 系 主 任(签名) 年 月 日毕业设计(论文)开题报告设计(论文)题目上料机械手的设计及Inventor运动仿真一、 选题的背景和意义自从1962年美国研制出世界上第一台工业机器人以来,机器人技术及其产品发展很快,机器人技术不再局限于传统的工业和制造业,已被应用于众多领域。如我国研发出特种机器人、农业采摘机
4、器人1,据专家指出,21世纪将是发展服务用机器人2。提高产品的设计水平和缩短产品的设计周期,在产品设计过程中采用三维设计Inventor 软件进行产品的虚拟设计、虚拟装配和运动仿真,同时对机械手的作业空间进行了分析并仿真, 碰撞检测。 该上料机械手灵敏度高、稳定性好、环境适应性强的。对于现代化工业发展起了推进型的作用.二、 课题研究的主要内容:所完成的上料机械手只要能打到以下几点要求即可:a)生产纲领:1000件(两班制生产)b) 自由度(四个自由度)c)臂转动150d)上下运动500 mme)臂伸长(收缩)100 mm三、 主要研究(设计)方法论述:本设计主要实在理解气压驱动和Invento
5、r基本工作原理的基础上,运用PLC编程对其进行应用, 机械手设计采用自下而上和自上而下相结合的设计思想, 每一部分的设计过程不是独立进行,而是逐步递进、前后照应.考虑到设计阶段难免会经常调整、修改设计方案. 在设计中充分利用Inventor独特的“自适应”技术和方便高效的“设计加速器”功能, 以提高设计效率. 资料主要由指导老师提供及查阅参考书整理而成。四、设计(论文)进度安排:时间(迄止日期)工 作 内 容8.18.2选题,查找、分析资料8.38.4选题,查找、分析资料8.58.7选题,查找、分析资料8.88.11气压驱动的设计8.128.15机械手组装设计8.158.18绘制图纸8.188
6、.20完成初稿,交指导老师审阅8.208.24完成初稿,交指导老师审阅8.248.28完成设计并定稿,答辩五、指导教师意见: 指导教师签名: 年 月 日六、系部意见: 系主任签名: 年 月 日机械手设计及Inventor运动仿真目 录引言 61.气动机械手的功能与结构 72. PLC 的选择 82.1 确定PLC 所需的I /O 点个数 82.2 用户程序存储器容量的选择 82.3 PLC 型号的选择83.PLC 控制系统的工作原理 93.1 控制系统的软件设计93.2 机械手的动作顺序9.3.3 程序的编制10.4.系统的气动原理 145.气缸的设计 155.1 气缸设计165.2 活塞工作
7、行程计算166.手爪的设计166.1 手爪几何尺寸166.2 手爪的受力分析176.3 手指的夹持误差与结构尺寸176.4示例 207.结束 21 8.答谢辞 219.参考文献22机械手设计及Inventor运动仿真摘要:本课题为普通车床配套而设计的上料机械手。工业机械手是工业生产的必然产物。它是一种模仿人体上肢的部分功能,按照预料 要求输送工件或进行操作的自动化技术设备,对实现工业生产的自动化,推动工业的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中
8、经常出现的笨重工件的搬运和长期频繁,单调的操纵,采用机械手是有效的。此外,它能在高温,深水,宇宙,放射性和有毒,污染环境条件下进行操作,更显示其优越性。有着广阔的发展前途。通过应用AutoCAD技术对机械手进行结构设计和气压传动原理设计,运用Inventor技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前.它能实行自动上料运动;在安装工件时,将工件送入卡盘的夹紧运动等.上料机械手的运动速度是按着满足生产率的要求来设定.本课题论述了基于PLC 控制的气动机械手装置的功能、结构、原理及软件设计。文中介绍了PLC的选择,I /O 点分配,PLC 与器件的逻
9、辑电路连接及系统的气动原理与工作原理等具体内容。关键词:机械手;AutoCAD;动画仿真;可编程控制器(PLC);气动;控制系统Abstract:This topic forms a complete set the high-quality goods manipulator for the conventional lathe who designs. The industry manipulator is the industrial production inevitable product. It is one kind of imitation human body upper l
10、imb partial functions,Requests according to the expectation to transport the work piece or to carry on the operation the automation technical equipment, to realizes the industrial production automation,The impetus industry further develops the vital role. Thus has the formidable vitality to receive
11、the people widely to take with welcome. The practice proved,The industry manipulator may replace the manpower the strenuous labor,Obviously reduces workers labor intensity,Improvement work condition, enhances the labor productivity and the automated level. In the industrial production appears freque
12、ntly unwieldy work piece transporting and long-term frequent,Monotonous operation,Uses the manipulator is effective. In addition,It can in the high temperature,Deep water,Universe,Radioactivity and virulent,Under the pollution environmental condition carries on the operation, demonstrates its superi
13、ority. Has the broad development future.This topic through carries on the structural design and the hydraulic transmission principle design using the AutoCAD technology to the manipulator, carries on the three dimensional entity modelling using the Inventor technology to the high-quality goods manip
14、ulator, and has carried on the movement simulation,Enables its a basic movement more concrete development in front of the people. It can implement the automatic high-quality goods movement;When installs the work piece,Sends in the chuck the work piece the clamp movement and so on. The high-quality g
15、oods manipulators velocity of movement presses is satisfying the productivity the request to establish.Key word:Manipulator;AutoCAD;Animation simulation;Programmable controller (PLC);Air operated;Control system引言:气动机械手具有气源使用方便、不污染环境、动作灵活迅速、工作安全可靠、操作维修简便以及适于在恶劣环境下工作等特点,因而在冲压加工、注塑、机床下料、仪表及轻工业等行业中有着广阔的
16、应用前景。随着工业自动化程度的提高,工业现场的很多重体力劳动必将由机器代替,这一方面可以减轻工人的劳动强度, 而且还可以大大提高生产效率。例如:在我国的许多中小型汽车行业中,往往冲压成形这一工序还需人工搬运沉重的工件,即费时费力,又影响效率。为此我们研制了这一套气动机械手模拟装置,该机械手除外形尺寸比实物小些外,其结构,原理及功能与实际的机械手完全一致。1.气动机械手的功能与结构该气动机械手主要有伸缩汽缸、升降汽缸、摆动、机械手等功能。其操作目标是将被加工工件从左工作台搬运到右冲压机床上,如图所示。假设机械手原处于位置A 点(初始位),要把B 点处工件搬到C 点冲压加工。该机械手的工作方式有单
17、步手动和连续自动2种工作方式。在单步手动工作方式下,每按一下START按钮,机械手按程序执行一步相应动作,可实现上升、下降、前进、后退、右摆、左摆、抓料、放料8 种点动操作。在连续自动工作方式的状态下机械手的顺序实现的动作如图1 示意图所示:前进下降抓料上升后退右摆前进下降松料上升后退左摆(回到初始位),机械手可反复不断的进行上述循环动作。在连续循环动作过程中,操作员可随时按下STOP 按钮,来终止机械手的操作运行。要实现上述所述的功能操作,该气动机械手控制系统应包括PLC 控制部分和气动控制两大部分。其主要组成元件有:PLC,传感器,一个集成了4 个电控阀(其中3 个双电控电磁阀和1 个单电
18、控电磁阀)的紧凑型带独立插座的阀岛及2 个气缸(两个滑块气缸,一个摆动气缸),一个机械手,一个直流继电器和两个具有10 个输入、10 个输出的I /O 接线端子等元件。图(1)机械手的三维效果图2. PLC 的选择2.1 确定PLC 所需的I /O 点个数根据前述要求可知PLC 需要有以下输入信号端:7个检测机械手运动状态的传感器信号,分别用来检测机械手臂的伸缩极限、升降极限、摆臂摆动极限和机械爪手状态及1 个检测吸料块是否被放置到位的传感器信号。另外根据系统控制的要求, 需要START(开始)和RESET (复位)2 个按钮信号,1 个STOP(停止)按钮信号及1 个直流继电器的信号,还需要
19、1 个用来控制机械手运行方式的AUTO/MAN(自动/ 手动)旋动开关。PLC 所需要的输出信号端:用来驱动2个气缸及机械手的电磁阀需要7 个输出信号,3 个用来显示工作状态的START,RESET,POSITION 信号指示灯,他们分别用来指示START,RESET 按钮的闭合状态和抓料块是否被放置到位。所以选用输入点的个数13、输出点的个数10的PLC。2.2 用户程序存储器容量的选择由以上分析可知,本系统不需模拟量变换及存储,只需要23 个开关量控制,因此可按以下公式估算:存储器字数开关量I /O 总数8=238=184 字。2.3 PLC 型号的选择根据以上分析,要选择输入点的个数13
20、、输出点个数10,存贮器字数184 的PLC。对PLC 的扫描速度及其它方面无特殊要求。选用S7-300(CPU315-2DP)型号的PLC 及2 个SM323 数字量I /O 模块。它共有16个输入、输出点、随机存储器为48KB、计数器64 个、定时器128 个。其结构紧凑、体积小、处理数据和通信能力强、功能指令丰富、并且具有PROFIBUS-DP,MPI通信接口,易于构成现场总线系统和实现多级网络控制。I /O 接点的分配见表1,PLC 与器件的逻辑路线见图23.PLC 控制系统的工作原理该控制系统的工作原理如图2,系统中的6 个行程开关,1 个真空传感器,1 个检测吸料块是否到位的传感器
21、信号及控制面板上的5 个信号(START 按钮,RESET 按钮, POSITION 按钮,STOP 按钮,AUTO/MAN 旋动开关)作为输入信号由接线端子,再经标准数据线传输线送至PLC入口。处理器扫描输入映像寄存器,根据程序的要求执行相应的逻辑运算,执行结果写入到输出映像寄存器,然后经标准数据线及接线端子传输线传送至阀岛,换向阀。电磁铁接通,打开对应通路,驱动气缸内的活塞运行。气缸电磁阀传感器信号I/O接线端子S7300操 作 台标准数据线传输图(2)控制系统原理框图操作面板安装在控制室里, 24V 直流电源,S7 -300PLC,阀岛,真空发生器,直流继电器等均放置在电控箱里。直流继电
22、器的作用是当发生紧急事故时,可立即切断PLC 模块的输出电源从而切断了整个输出信号,使系统停止工作。本系统控制信号采用带I /O 接线端子的标准数据线进行传输,不仅便于系统集中布线和检修,而且还具有使系统结构紧凑和便于对系统进行远程控制等优点。3.1控制系统的软件设计采用STEP7 软件进行编程,该软件功能强大,可实现测试,在线编程、运行诊断等多种功能,并且具有友好的用户界面。它支持梯形图( LAD), 功能块图(FBD),语句表(STL) 等多种编辑语言,用户完全可以根据自己的爱好进行选择。我们选用梯形图进行编程,编程思路:在编程时我们首先应考虑机械手的各个输出状态,然后把与每一个输出动作有
23、关联的各个输入器件的状态列出来,并且要考虑系统控制的具体要求,如当按下STOP 按钮可马上停止动作,按下RESET 按钮可立即复位。另外为了保证系统的安全运行性,在编程时应设置一些必要的联锁,例如上升与下降之间,机械手臂的伸出与回缩之间,以防止功能相反的两个输出同时为ON。由于篇幅有限,这里仅提供了机械手伸臂动作的程序:如图5 所示Network 伸臂程序,机械手在一个周期的行程中有两个伸臂动作,分别是旋转前和旋转后,在这两个状态下我们分别考虑它们的输出以及与此输出有关系各个输入器件的状态。在手动的基础上,我们只需要在前面加上一个Auto man 常闭触点就成为了自动程序,同时在程序中我们也加
24、入了互锁和自锁程序。当编好程序时, 用厂家专门提供的PC 适配器从计算机的RS-232 串行口下载程序到PLC 的MPI 接口。3.2 机械手的动作顺序气动机械手顺序动作示意图3.3 程序的编制一个标准的工作循环包含l2个基本动作。针对不同的情况,机械手的工作方式有多种选择。因此在程序编制中必须充分考虑到各种工况和条件,以满足不同的要求。现将程序设计和编制过程中的几个问题简要地说明如下:a)程序的总体结构设计:根据机械手的实际工作情况,程序必须具有自动运行和手动运行两种基本工作模式;程序还必须提供回原点的功能;为了便于机械手动作的单步调试,程序必须提供单步运行的功能b)手动模式程序中要求拨动哪
25、个按钮,一般来说机械手就作出相应的动作。但是,从保护设备和防止不必要的损伤出发,有些动作是具有比较严格的联锁条件的。c)I0(输入输出)点的分配表输入信号输出信号复位钮I0.7上升灯Q4.2上限位I0.3下降灯Q4.3下限位I0.4左移灯Q4.0左限位I0.1右移灯Q4.1右限位I0.2开始灯Q5.7复位钮I0.6夹紧灯Q5.0夹紧定时T0松开定时T1灯闪烁定时T2 T3d)功能图:e)顺序控制程序:I0.6-|- M30.1 M30.0 -|/|-( M30.0 ) -|-M30.0 I0.1 I0.2 M30.2-|-|-|-|/|-( M30.1 ) M30.1 -|- M29.1 I0
26、.1 -|-|- M30.1 I0.7 M30.3-|-|-|/|-( M30.2 ) M30.2 -|- M30.2 I0.4 M30.4-|-|-|/|-( M30.3 ) M30.3 -|- M30.3 T0 M30.5-|-|-|/|-( M30.4 ) M30.4 -|- M30.4 I0.3 M30.6-|-|-|/|-( M30.5 ) M30.5 -|- M30.5 I0.2 M30.7-|-|-|/|-( M30.6) M30.6 -|- M30.6 I0.4 M29.0-|-|-|/|-( M30.7 ) M30.7 -|- M30.7 T1 M29.1-|-|-|/|-(
27、 M29.0 ) M29.0 -|- M29.0 I0.3 M30.1-|-|-|/|-( M29.1) M29.1 -|-驱动电路: T3 M30.1 T2-|-|-( SD ) T2 T3-|-( SD ) T2|-|-( Q5.7 )M30.2-|- M30.6 -( Q4.3 ) -|- M30.3 -|-( S ) Q5.0 M30.3 T0-|-( SD ) M30.4 -|-( Q4.2 ) M30.0 -|- M29.0 -|- M30.5|-|-( Q4.1 ) M30.7 -|-(R ) Q5.0 M30.7 T1-|-( SD ) M29.1-|- M30.0 -( Q4
28、.0) -|-4.系统的气动原理如图3 所示整个气动系统就是要对摆动气缸,伸缩气缸和升降气缸及一个真空吸盘的动作进行控制。真空系统的工作原理是利用气体的喷射原理产生真空,压缩空气经真空发生器喷射口向消音器喷射,由于气体的粘性,高速射流卷吸走负压腔内的气体,因而使与之相连的吸盘6 产生真空吸附作用吸起工件。7为可调压力开关,可根据吸料的重量进行适当调节,当气压达到可调压力开关设定值时,吸盘吸气输入信号为ON。气源出来的气体经过二联件8 处理后进入到由1 个三位五通换向电磁阀和三个两位五通换向电磁阀组成的紧凑型带独立插座的阀岛,然后经可调单向节流阀5 来驱动气缸内的活塞运行5.气缸的设计5.1 气
29、缸设计已知空气工作压力P=0.550.75 MPa,输气管外径D =414 min、壁厚 =6 min、管长L =6 m,安全系数n=2,活塞杆直径d活塞直径D =0.25,重力加速度g=9.81ms,则输气管重量:由于活塞杆拉力等于输气管重量,从机械手单臂受到输泥管总重力、空气工作压力为Pmin时的极端(最不利)情况考虑,有由式(1)得D = 132 mm, 因此d=0.25D =33 mm,取缸径D=135 mm(选外径为146的无缝钢管作气缸体的外径),活塞杆直径d=35 mm。5.2 活塞工作行程计算机械手抱住输气管时,2个侧气缸12、14夹角为0。,即2个气缸平行。图2中A为侧气缸摆
30、动中心,B为缸外底棱角,设A距气缸外底式中 D1 气缸体外径,Dl=146 mmd 侧气缸摆动中心A处轴座外径,d= 40 mm,A点距主气缸13轴线的间距式中 机械手手掌钢板、胶垫的厚度计算结果表明:ABL ,2个侧气缸在摆动过程中,其外底棱角B点不会相撞。最后按使用要求确定2个侧气缸摆动幅角各为045。,即夹角为090。根据几何关系(若主气缸头部起点在C 点,则终点就在C2点),可求得主气缸13活塞相应工作行程最后确定主、侧气缸活塞工作行程为300 mm。6.手爪的设计6.1 手爪几何尺寸手爪的结构如图3所示,推块2受气缸的推力作用后通过连杆3、铰链4带动两个手指5绕支点E1、E2回转,以
31、握紧或松开物件。握紧力F随7和卢变化,当角7=0o时为极限点(返回点),此时,若推块2沿箭头方向再移动,手指反而松开。若气缸推力P已定,连杆3的推力N= ,当0时夹紧工件,若把机构看成是完全刚性的,就会N,相应握力F,考虑到机构及工件受力后的弹性变形,N仍会非常巨大,这样会造成机构的损坏;当7过大时,推力N会不足,故常取r=1545。所以此手部结构所能抓取的极限尺寸比的比值较小,以防止握力变化过大。上料时机械手夹取毛坯状态如图3所示,此位置气缸从原始位置向前推进了21mm,相应r=30。气缸退回原位时的位置为手爪所能夹取最大尺寸时的位置,用作图法绘出,手爪所能夹取的最大尺寸为288mm,此时为
32、423644 。把气缸行程定为40mm,用作图法绘出,所能夹取的最小尺寸为242mm,此时为191455。工件毛坯尺寸为288mm,车完后尺寸为252 mm,在此范围内。6.2 手爪的受力分析手爪的受力分析主要计算所需夹紧力F及气缸驱动力P的大小,从而确定气缸的缸径大小。如图3所示,上料时夹紧毛坯所需力量最大。工件重力Q=300 N,摩擦系数f =0.1,N 为连杆推力,气缸理论驱动力P,实际驱动力P,F1为夹紧力,Fl为摩擦力,则Fl=Ff。则力平衡方程:Y=0(1)由于F的反力F=F,Fl的反力F l=Fl=则以 l为支点的力矩平衡方程 (2)由(1)式得:解(2)式得实际驱动力:若气源压
33、力为P=04 MPa采用缸径为 80 mm的气缸,其驱动力为能满足要求。6.3 手指的夹持误差与结构尺寸机械手能否准确地夹持工件,将工件送到指定位置,不仅取决于机械手各运动部件的位置精度,而且也与手指的夹持误差大小有关。而手指的夹持误差大小既与工件尺寸的变化范围有关,同时又与手指的结构尺寸有关。下面以v型手指夹持圆形棒料为例来进行分析。a)单支点回转型手指图为单支点回转型手指的结构示意图。其中点A为刚性联结;支点D到V型槽顶点A的距离为z,即手指长度,V型槽的夹角为2 ,v型槽的角平分线AC与 的夹角为 ,工件半径为 。根据几何关系,工件轴心位置C与支点0之问的距离 应用余弦定理可求得:可见,
34、对于一定的机械手手指,工件轴心位置与工件半径的关系满足双曲线方程,对应曲线(其中一支) 如图所示。单支点手指结构示意图 X-R曲线该曲线坐标点对应手指的夹持位置是 OCA=90。,显然,对于一定结构尺寸的夹爪和夹持工件的尺寸范围,根据双曲线特点,对应R。附近的曲线变化率较小,故在R= R。处附近对应的夹持误差最小,即当根据给定的夹持工件的半径范围R=R1R2 来确定手指各有关尺寸时,若风取为夹持工件的平均半径,则对应的夹持误差最小,此时,在一定条件下,即当v型槽夹角及手指长度给定时,则有:对应的夹持误差计算如下:取,以此来评价机械手夹恃误差。如果忽略计算误差,则可只计算 或x任何一个即可。上述
35、这一设计计算称为对称曲线段设计或最小夹持误差原则。显然,对于各种不同尺寸的机械手手指,乓相应的最小夹持误差是不同的。分析结果表明,增大,有利于进一步减小夹持误差。此外,对于一定的机械手,能夹持工件的允许尺寸范围是一定的,不难求得最大夹持尺寸为:如果所要求夹持工件直径范围较大,设计出机械手虽然满足精度要求,但有可能超出允许夹持尺寸范围,不能可靠夹持。例如当2=140、f=18R。时,若R 3R1 ,就会超出允许范围。实际应用中,若2=120度,一般可取Z=(24)R0。对于一定的V型槽手指,当lR。较大时,由于按对称曲线段设计对应的实际夹持空间范围相对于并非对称,小于 的允许夹持范围比大于R。的
36、允许夹持范围要小,因此,有时可按非对称曲线段设计,此时有:鉴于上述分析,只考虑前者,故:然而,这一情形很少被采用。b)双支点回转型手指对于双支点回转型手指(如图3所示),工件轴心位置到两支点连线的垂直距离为:式中:s为垂直于 方向的两支点间距离的一半,其他符号含义同前。式(12)同样为双曲线方程,其双曲线极值点坐标为:如果按对称曲线段设计, 仍由式(5)确定,对应有:这种双支点手指尽管仍具有最小的夹持误差,但比起有相同结构尺寸的单支点手指易超出允许的夹持范围,换言之,它只适合于要求夹持范围较小的情况,而且要求s不是很大。为拓宽机械手的夹持应用范围,一般按非对称曲线段设计,此时 为:6.4 示例
37、某一单支点回转型手指用于抓取棒料,棒料半径为40 60mm,要求夹持允差为lmm,试确定手指各结构尺寸。为方便起见,取v型槽夹角2=140 ,L=1.8 =1.850=90mm,因此:故夹持误差满足要求。根据式(8)易验证夹持允许尺寸范围也符合要求。7.结束语应用机械手可以提高生产过程的自动化程度,改善劳动条件,避免人身事故。在自动化机床和综合加工自动线上设置机械手还可以减少人力和更准确地控制生产的节拍。总之,有效地应用机械手,是发展机械工业尤其是发展以大批量生产为主的轴承工业的必然趋势。该控制系统与其他控制系统相比,节省了大量的电气元件,缩小了控制柜的体积。由于采用软件编程,其动作行程可根据
38、现场实际情况进行随时调整。该气动机械手经安装,调试,能够在模拟生产线上良好运行。此系统简单可靠,安全性高,可重复性好,各项性能指标均达到预期要求。8.答谢辞值此论文完成之际,我要衷心的感谢机电工程系的老师们,他们为我们提供了场所和资金,保证了设计的顺利进行。在这里我要重点感谢我们的设计指导老师胡盘峰老师,他花费了大量的业余时间来给予我们悉心的指导,当我们在改造过程中遇到难题时,他和我们一起查资料,一起攻克难关。同时感谢在论文撰写过程中朋友给与我的无私帮助,感谢寝室好友在生活上对我的关心和照顾,感谢父母对我的精神支持,在此谨向他们表示最诚挚的谢意与感激!9.参考文献:1 王承义机械手及其应用M北
39、京:机械工业出版社,19812廖常处PLC编程及应用M机械工业出版社,20023SMC有限公司现代实用气动技术M北京,机械工业出版社19984 黎树明等工程船液压传动装置北京:人民交通出版社,19845 凌勇坚绞车气动刹车装置的设计机械,2002(4)6 许伟达,凌勇坚气压操作系统的设计液压与气动,2003 (3)7林国重等液压传动与控制北京:北京理工大学出版社19868官忠范等液压传动系统北京:机械工业出版社,19819膪启贤主编 自动机械设计北京:轻工业出版社出版198710黄锡凯,邦文纬主编 机械原理 北京:高等教育出版杜.198111棘灏主编 机械设计手册北京:化工业出版社出版1991
40、毕业设计(论文)成绩评定表一、指导教师评分表(总分为70分)序 号考 核 项 目满 分评 分1工作态度与纪律102调研论证103外文翻译54设计(论文)报告文字质量105技术水平与实际能力156基础理论、专业知识与成果价值157思想与方法创新5合计70指导教师综合评语: 指导教师签名: 年 月 日 二、答辩小组评分表(总分为30分)序 号考 核 项 目满 分评 分1技术水平与实际能力52基础理论、专业知识与成果价值53设计思想与实验方法创新54设计(论文)报告内容的讲述55回答问题的正确性10合计30答辩小组评价意见(建议等第): 答辩小组组长教师签名: 年 月 日三、系答辩委员会审定表1 审定意见2审定成绩(等第)_ _ 系主任签字: 年 月 日上料机械手的设计及Inventor运动仿真 机电工程系机电075 赵凯 Page 23 of 23
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
