 普中科技51单片机(视频配套完整版)
普中科技51单片机(视频配套完整版)

《普中科技51单片机(视频配套完整版)》由会员分享,可在线阅读,更多相关《普中科技51单片机(视频配套完整版)(123页珍藏版)》请在装配图网上搜索。
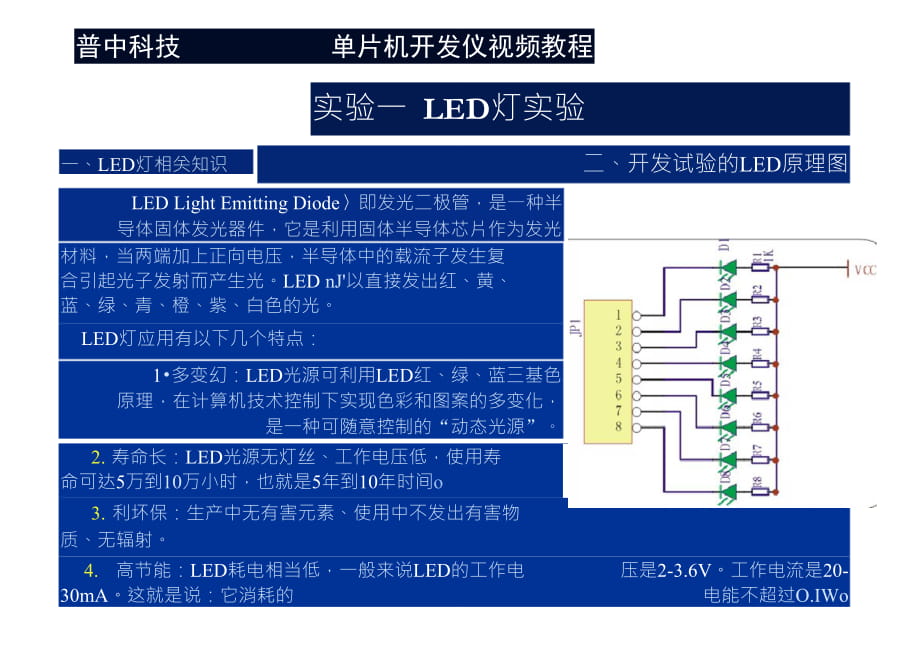
1、普中科技单片机开发仪视频教程实验一 LED灯实验一、LED灯相关知识二、开发试验的LED原理图LED Light Emitting Diode即发光二极管,是一种半 导体固体发光器件,它是利用固体半导体芯片作为发光材料,当两端加上正向电压,半导体中的载流子发生复 合引起光子发射而产生光。LED nJ以直接发出红、黄、 蓝、绿、青、橙、紫、白色的光。LED灯应用有以下几个特点:1多变幻:LED光源可利用LED红、绿、蓝三基色 原理,在计算机技术控制下实现色彩和图案的多变化, 是一种可随意控制的“动态光源”。2. 寿命长:LED光源无灯丝、工作电压低,使用寿 命可达5万到10万小时,也就是5年到1
2、0年时间o3. 利坏保:生产中无有害元素、使用中不发出有害物 质、无辐射。4. 高节能:LED耗电相当低,一般来说LED的工作电 压是2-3.6V。工作电流是20-30mA。这就是说:它消耗的 电能不超过O.IWo三、排线连接方法看视频图像四、相关的知识点1、启动文件STARTUP.A51:它包含冃标板启动代码,在每个工程中加入这个文件。 只要复位,该文件则立即执行,其功能包括:1定义内部RAM大小、外部RAM小、可 重入堆栈位置。2清除内部、外部或者以此页为单元的外部存储器。3按存储模式初使 化重入堆栈及堆栈指针。4.初始化8051硬件堆栈指针。5向mam()函数交控制权2、头文件#lncl
3、udereg51.h定义了51的所有寄存器,v尖括号表示在安装冃录 下找reg51.h文件,双引号表示在当前工程目录下找reg51.h文件。3、子函数:C语言的执行从main函数开始,每个函数体是相互独立,被main函数 调用的函数都是子函数,子函数与子函数也可以相互调用4、for循坏格式:for(表达式1;表达式2;表达式3) 语句;5、16进制数,以Ox开头的表示16进制,如:Oxff 0x12 0x008进制数,用数字0开头的数是八进制如:023表示八进制的2310进制数,口常生活中用到的数字,女U: 100 , 200, 30等五、程序示例实验二按键实验轻触开关是一种电子开关,使用时,
4、轻轻按开关按钮就可使开关接通,当松开手时, 开关断开,其内部结构是靠金属弹片受力弹动来实现通断。轻触开关由于体积小重量 轻在家用电器方面得到广泛的应用,如:影音产品、数码产品、遥控器、通讯产品、家 用电器、安防产品、玩具、电脑产品、健身器材等等。但轻触开关也有它不足的地方, 频繁的按动会使金属弹片疲劳失去弹性而失效。因此现在很多电器的按钮都使用导电 橡胶或锅仔开关,比如电脑键盘,遥控器,手机等。关于五脚轻触开关的脚位接法:两个引脚为一组,四角是为了焊接的更加稳固,第五 个引脚是为接地线用的。单片机开发仪视频教程单片机开发仪视频教程二、轻触按钮开关在开发仪上应用原理图三、排线连接方法看视频图像单
5、片机开发仪视频教程、知识点l.mtniis.h: _nop_函数在此头文件中,此函数是空指令函数,相当汇编NOP 指令。2.Sbit关键字:是KC增加的关键字,用来定义位变量,它有三种用法:1. sbit位变量名二地址值 例如:sbit AC二0xD62. sbit位变量名二寄存器名称人寄存器某位的序号 例如:sbit KI = P0-03.Sbit位变量名二寄存器地址八寄存器某位的序号例如:sbit 1CC0-11 12J1345!BG61 7 I8TGNDDATA OUTPUTSVcc Y Yl Y2 Y3 Y4 Y5 Y6SELECTENABLE丁陀丁J1511212 3 4 5 6 7
6、 823 4 5 6 (D-27 28/ A-RED4b GREEN内部原理图普中科技单片机开发仪视频教程实验八步进电机实验一、步进电机的相关知识:步进电机分单极性和双极性两种:单极性步进电机有两个线圈,但有五条或六条线,也就是 在一个线圈的中间增加了 一个抽头,五条线的也可以看成是六条 线,它是把两个线圈的两根中间线并在一起。由于在一个线圈的 中间有了抽头,电流就可以在一个线圈的一半走不同的流向。但 这时,只是用到电机线圈的一半而已。单极性驱动电路H桥式驱动电路双极性步进电机之所以如此命名,是因为每个绕组都可以两 个方向通电。因此每个绕组既可以是N极又可以是S极。它又被称 为单绕组步进电机,
7、其磁极(不是中间抽头的单一线圈)中的场强 是单极性步进电机的两倍。双极性步进电机的每个绕组需要一个 可逆电源,通常由II桥式驱动电路提供。由于双极性步进电机比单 极性步进电机的输出力矩大,因此总是应用于空间有限的设计中。 这也是软盘驱动器的磁头步进机械系统的驱动之所以采用双极性 步进电机的原因。步进电机运行有三种步进方式:单拍、双拍、半拍方式。单拍方式:它是指每次仅给一个绕组通电,使转子旋转,并运动到转子永磁体与具有相 反极性的绕组对齐的位置。双拍方式:它同时给两个绕组通电,这样就使转子旋转,并在永磁体到达两个通电绕组的 中间位置点时平衡。双拍方式的优点是比单拍方式多获得41.4%的输出力矩,
8、不过代价是需 要花费后者两倍的能量,因为它有两相绕组同时通电。半拍方式:它工作时则让两个绕组通电与单个绕组通电方式交替地进行。半拍方式的输 出力矩比双拍方式小,随设计不同,在15%30%之间变化,不过它可以获得双拍方式两 倍的步进分辨率(每圈两倍的步数)。普中科技单片机开发仪视频教程普中科技单片机开发仪视频教程单极性步进电机的节拍有(5线4为例)单四拍: A-B-C-D双四拍:AB-BC-CD-DA单双8拍:A-AB-B-BC-C-CD-D-DA (半步工作方式)双极性步进电机的节拍(4线2相为例)单四拍:A/ - B - A - B/双四拍:A/B AB - AB/ - A/B/ 单双8拍:
9、A/ A/B B AB A AB/ B/ A/B/普中科技单片机开发仪视频教程普中科技单片机开发仪视频教程普中科技单片机开发仪视频教程三、步进电机的原理图12345RDSC5A5M5B4D4MTIsA4M412345M3B3D3C3Vc A3B2D2C2E A2M2Ml12345B1D1CTAlOUTOCT2OLT3OUT4OUT5OUT6OUT7COMP15O6SULN2OO3DGNDP12O1 P11Q2P10Q3P13O4P14O5PY1215 PY1114 PY1013 PY1312 PY1411 BEEPKiGNDGND8COMGNDGM)ULN2003DLS14IM 4&51)17
10、A4VCCD4 16A5 16B5 15 C5 14D5 1312M 11 C4 10921ININININININING16 u6hC2151N11N21N3IN4IN5IN6IN7uDT2T3T4T5T6T7 u u u u u u u o o o o o o o1VCCC2 16T1T2T3T4T5T6T7 u u u u u u u o o o o o o oOMcHC6800EM 3原理图HC6800原理图皓器盂IN7GND T1T213T4T5T6T/加 u u u u u u u:0 o o o o o o o cPIO 1U15FPY10iVCC1PY121QPY13JAPYU
11、q5J3普中科技单片机开发仪视频教程M PWR专业步进驱动芯片原理图普中科技单片机开发仪视频教程四、实验的接线演示:看视频演示五、例程演示:I. 单双八拍1的C语言作为例程演示HC6800EM3HC6800普中科技单片机开发仪视频教程粕DcBAHEXA1110Ox f eAB1100Ox f cB1101Ox f dBC1001Oxf9C1011OxfbCD0011Oxf 3D0111Oxf 7DAa110Oxf 6KUN = QKf Oafc, Oxfd, 0涎9, Oxfb, 0xf3, Oxf7, Oxf6;步讲电机相序表拍DcBAHEXA0001OxflAB0011Oxf 3B0010
12、Oxf 2BC0110Oxf 6C0100Oxf4CD1100Oxf cD1000Oxf8DA1001Oxf 9RUN 二Oxfl, Oxf 3, Oxf 2, Oxf 6Oxf4, Oxfc, 0xf8, Oxf9 :/步进电机相序叢普中科技单片机开发仪视频教程实验九中断与外部中断实验80C51提供了 5个中断源:2 个外部中断 INT0(P3.2)和 INT1(P3.3),2个片内定时器/计数器T0(P3.4)和T1(P3.5)的溢出屮断TFO和TF1,1个片内串行口的发送或接收中断请求源TI或RI o定时器/计数器控制寄存器TCOND7E6D5C4D3|D2 JDO功能|TF1TR1TF
13、0TR0IE1IT1rrTITO:ITNO的触发方式控制位,由软件设置。 IT0二0时,INTO为低电平触发方式IT0二1时,INTO为负跳变触发方式。 IEO:INTO中断请求标志位。当INTO引脚 上出现中断请求信号时,由硬件置位IE0 在CPU响应中断后,再由硬件将IE0清0ETOEXIESyIT1 = 0I一IT1 = 1T1 P3.5IEIPINT1On3TXP3.0RXP3.1SCONEAET1/ V高优先级中断申“自然优先级中断系统结构图EAESET1EX1ET0EX01地址1QFHACHABHAAHA9HA8H中断允许控制寄存器IE ii i I iEA:CPU中断允许标志位,
14、1:开发所有,0:禁止 ES: $行口允许中断位,1:允许,0:禁止 ET1:定时器1允许中断位,h允许,0:禁止 EX1:外部中断1允许中断位,1:允许,0:禁止优先级控制寄存器IP|lPPS PT1PX1PT0?: : ? 1|地址|BCH BBHBAHB9HB8h|PS: $行口中断优先级控制位PT1:定时器T1中断优先级控制位PX1:外部中断1中断优先级控制位PT0:定时器T0中断优先级控制位PX0:外部中断0中断优先级控制位1:设置中断 为高优先级0:设置中断为低优先级普中科技单片机开发仪视频教程5个中断源分别设置成不同的优先级。如果都被设置成同一优先级,这5个中断源因駛件 的组成不
15、同而形成不同的内部序号,从而构成了不同的自然优先级。每个中断源,有对 应的中断服务程序,这些程序有固定的存放位置,当产生相应的中断后,就可以跳到相 应的位置执行中断程序。这个位置就在中断向量的入口地址。每个位置只有8个字节的 程序存储空间,但是中断程序很多都会超过8个字节。在汇编语言中,用LJMP跳转指令, 把实际处理的中断程序放到ROM的任何位置。而在C语言编程中,C语言编译器自行处 理,不需要我们考虑。中断源同级内部自然优先级中断向量入口地址外部中断0定时器0外部中断1定时器T1串行口最高级1 r最低级0003H000BH0013H001BH0023H5个中断源的自然优先级和中断入口地址中
16、断服务程序函数的格式:返回类型 函数名(参数)interruput n严格完整格式:返回类型 函数名(参数)interruput n using nJI?11interruput n屮门对应中断源的编号,其值从0开谿。以80C51为例门的编号0-4分别是: 0、外部中断0 1、定时器0中断 2、外部中断13、定时器1中断4、串口中断using a中n的值是0-3,对应使用4组工作寄存器。关于51单片机工作寄存器组为了进行中断的现场保护,80C51单片机除采用堆栈技术外,还采用了寄存器的方式。 51单片机有4组名称均为R0-R7的工作寄存器,中断产生时,可以通过简单地设置RS0和 RS1来切换工
17、作寄存器组。提高了51单片机现场保护和现场恢复的速度,对于提高CPU 的工作效率和响应中断的速度是很有利。若在一个实际的应用系统中,不需要四组工 作寄存器,那么这个区域中多余单元可以作为一般的数据缓冲器使用。位D7D6D5D4D3D2D1DO |含义丫F0RS1RS0RSIRS0类型字节地0 0 0 11 01 10组寄存器 1组寄存器 2组寄存器 3组寄存器00H 07H 08H-0FH 10H-17H 18H-1FHPSW程序状态寄存器CY:进位标志 AC:辅助进、借位F0:用户标志位0V:溢出标志位 P:奇偶校验位高优先级中断可以中断正在处理的低优先级程序,因而必须注意寄存器组,分配的方
18、法 是使用using n来制定。实验十 定时器中断实验80C51单片机内部集成了 16位的町编程定时器/计数器,他们分别是定时器/计数 器0(T0)和定时器/计数器1(T1)。他们既町以匸作在定时器方式,实现对控制系统的 定时或精准延时控制,又可以匸作在计数方式,用于对外部的脉冲事件计数。与TO和T1相关的寄存器:1. 有2个8位控制寄存器TMOD和TCON,2. 有2个16位的计数器THO、TLO、TH1、TL1,他们都是16位的加1计数器也就是 增量式计数器。振荡器P振I曰市HUI部外定时器弁计满溢出”12分配TMOD工作模式控制寄存器功能:用来设置各个定时器/计数器的工作方式,选择定时器
19、或计数器功能。 控制T1控制TO位D7D6D5D4D3D2DIDO含义GATEC/TMlMOGATEC/TMlMO工作方式0: 13位定时器/计数器,最多可计数 2的13次方次。工作方式16位定时器/计数器,最多可计数2的 16次方次,。工作方式2: 8位定时器/计数器,计算次数最多 为2,计算次数最多M1M0方式00模式001模式110模式211模式3由J-TMOD只能直接字节寻址,所以对TO和T1 的工作方式只能以字节写入。TMOD|= 0x11;THl=OxlC; /12.DOOMTLl=0xl8:IE = 0x8A:TRI = 1:C/T = 0定时器模式C/T = 1计数器模式门控位
20、GATE = 0与INTO无关GATE 二 1与INTO有关为2八8。TCON工作状态控制寄存器(地址88H)功能:用来控制定时器/计数器的启停和作为运行状态的标志等。功能TF1TR1TFOTR0IE1IT1IE0IT0位地址8F8E8D8C8B8A8988TCON寄存器即町字节 寻址也可以位寻址 字节地址为88H, 位地址为88H8FHpurpose:系纟充初赢化I eloall| * # J | # y *r *r void system_Ini () TMOD|= 0x11:THl=OxlC:/12.DOOMTLl=0xl8;IE = Ox8A;TRI = 1;TCON的低四位和 外部中
21、断有关什么是中断?由于某个事件的发 生,CPU暂停当前正 在执行的程序,转而 执行处理该事件的一 个程序。该程序执行 完成后,CPU接看执 行被暂停的程序。这 个过程称为屮断。定时器/计数器4种工作方式TMOD定时器/计数器结构简图 定时器/计数器的打开或关闭,由GATE、软件 控制位TR和INT共同决定。GATE = 0,只要用指令置TR为1即可启动定时器/计数 器,而不管INT的状态如何。位D7D6D5D4D3D2DI.DO含义GATEC/TMiMOGATEC/TMlMOIT01功能TF1TRITFOTROIE1IT1IEO位地址8F8E8D8C8B8A89TCON88GATE = 1,只
22、要INT为高电平且用指令置TR为1时,才 能启动定时器/计数器普中科技单片机开发仪视频教程普中科技单片机开发仪视频教程振荡器*12分配C/T = 0定时器C/T= 1计数器TROGATEP3.2 INTOTo引脚P3.4工作模式3开关控制高电平有效计满溢出TL0向CPU屮 请中断SATt断服务r程序TO工作在方式3, TLO构成8位计数器可用J:定时/ 计数,使用TO的控制位(TRO)和TFO的屮断源。 但是,7H0则只能工作在定时器状态,它借用T1的 TR1和TF1的中断源。如硬把T1匚作在方式3时,T1将处于 关闭状态。一般情况下,只有T1以I作方式2运行(当波特率发生器 用)时,才让TO
23、 L作于方式3。因为T1的TR1和TF1的中断源 被定时/计数器0借用了,只能把计数溢岀直接送给串行口。普中科技单片机开发仪视频教程普中科技单片机开发仪视频教程ipurpose:系统初跖化%elseli j j j * j j * j j jvoid systein_Ini () TM0D|= Oxll:THl=0xlC:/12.000MTL1=0x18: IE = 0x8A: TRI = 1;f*讥.|M* M* M* Me *M M* tl (Ims)中断中断* * * * * * * 审、void Tlzd(void) interrupt 3TH1 = Oxlc: /12.000TL1
24、= 0k18;LedNujTiVal-H-:尢时器/计数器初值的计算80C51的T1和TO中的计数器都是增量式的,因此,不能直接将实际耍计数的值作为初值放入计数寄存器中,而是将计数的的最大值减去实际要计数的值放入计数寄存器屮。定时模式计数脉冲是由单片机的晶体振荡器产生的频率信号经12分频得到。因此在设置定时时间之前,要确定机器的晶振频率。开发试验仪采用的12M的晶振频率的计算公式:一一fosc = 1 / Tosc o (fosc表不频率Tosc表不周期) 计数的周期:T 二(1/12 000 000) *12 = IjjiS (12分频) 计数的次数:计数的次数二定时时间/1阴假设我们定时的
25、时间是lOOps计数的次数= 100 1S / 11S - 100次 如果选用定时器0工作方式0:计算出来的初值= 8192-100工作方式1:计算出来的初值二65535 - 100工作方式2:计算出来的初值二256-100 (自动装载)工作方式3:计算出来的初值二256 - 100四、实验的接线演示:看视频演示五、例程演示:1. timrO和计数器功能的C语言作为例程演示知识点:中断程序的编写屮断服务程序函数的格式:返回值函数名mtermput n具屮门对应中断源的 编号,其值从0开始。以80C51为例n的编号0-4,分别是:0外部中断01定时器0中断2外部中断13定时器1中断4串口中断矩阵
26、键盘实验矩阵式键盘的结构与工作原理:在键盘中按键数量较多时,为了减少I/O口的占用,通常将按键排列成矩阵形式,在矩阵式键盘中,每条水平 线和垂直线在交叉处不直接连通,而是通过一个按键加以连接。这样,一个端口(如P1 口)就可以构成4*4=16个 按键,比之直接将端口线用于键盘多出了 一倍,而且线数越多,区别越明显,比如再多加一条线就可以构成20键 的键盘,而直接用端口线则只能多出一犍。因此,在需要的键数比较多时,采用矩阵方式来做键盘是合理的。矩阵式键盘结构显然比直接法要复杂一些,识别也要复杂一些。下图中,我们用程序把行线置低为电平,列 线为高电平。当按键没有按下时,行线和列线状态不变,一旦有键
27、按下,则高电平的某条列线将被低电平的行线 拉低,这样,通过读入被拉低列线的状态就可得知是否有键按下了。确定矩阵式键盘上哪个键被按下是一种“行 扫描法”。行扫描法又称为逐行(或列)扫描杳询法,是一种最常用的按键识别方法,介绍开发仪键盘识别过程如下:1 判断键盘中有无键按下 将全部行线P10-P13矩阵键盘接口置低电平,列线P14-P17置高电平,然后检测列线的 状态。只要有一列的电平为低,则表示键盘中有键 被按下。若所有列线均为高电平,则键盘中无键按一2.判断闭合键所在的位置 在确认有键按下后, 即可进入按键检测的过程。其方法是:1把行线置为低电平,列线置位高电平,用程序 检测4条列线的状态。2
28、.停止列线的检测,把列线置位低电平,行线置位高电平,用程序检测3条行线的状态。IM实验十二单片机IO扩展一 (74HC595)实验SPI总线简介SPI ( Serial Peripheral Interface )顾名思义,就是串行外围设备接口,由摩托 罗拉公司推出的一种高速、全双工、或多个从设备组成,主设备启动一个与从设备的 同步通讯,从而完成数据的交换。该总线大量用在EEPROM. ADC、显示驱动器之类的慢 速外设器件通信。SPI接口由四种信号构成1.SDI:串行数据输入2. SD0:串行数据输出3. SCK:串行移位时钟4. CS:从设使能信号我们开发试验彳义采用的74HC595和74HC165这两个芯片是遵循SIP协议的。它们只用到 SPI的3条线,所以只能单向传输数据。由于51单片机没有硬件的SPI总线控制器,所以 只能用软件模拟的方式来实现S PI协议通信。P
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 三基培训ppt课件--抗生素的分类及临床应用
- 三年级科学上册3.2《果实累累的季节》-ppt课件大象版
- 《离子键》ppt教学讲解课件
- 三年级科学上册4.2《动物怎样过冬》-ppt课件大象版
- 中考“转换”专题徽标类资料课件
- 人力资源管理师(二级第三章师级培训开发)课件
- 《利用相似三角形测高》教学ppt课件
- 两条直线的交点坐标及两点间的距离公式课件
- 人力资源管理师(四级)第三版-第六章-劳动关系管理课件
- 严格按照定额计价即施工图预算法课件
- 《良性前列腺增生》PPT课件
- 《廉颇蔺相如列传》复习ppt课件上课
- 人教版九年级物理上册ppt课件第十五章电流和电路
- 严谨务实准确高效课件
- 《廉颇蔺相如列传》公开课优质课ppt课件
