《根据下述资料完成对硬件仿真的实现(DOC 13页)》由会员分享,可在线阅读,更多相关《根据下述资料完成对硬件仿真的实现(DOC 13页)(14页珍藏版)》请在装配图网上搜索。
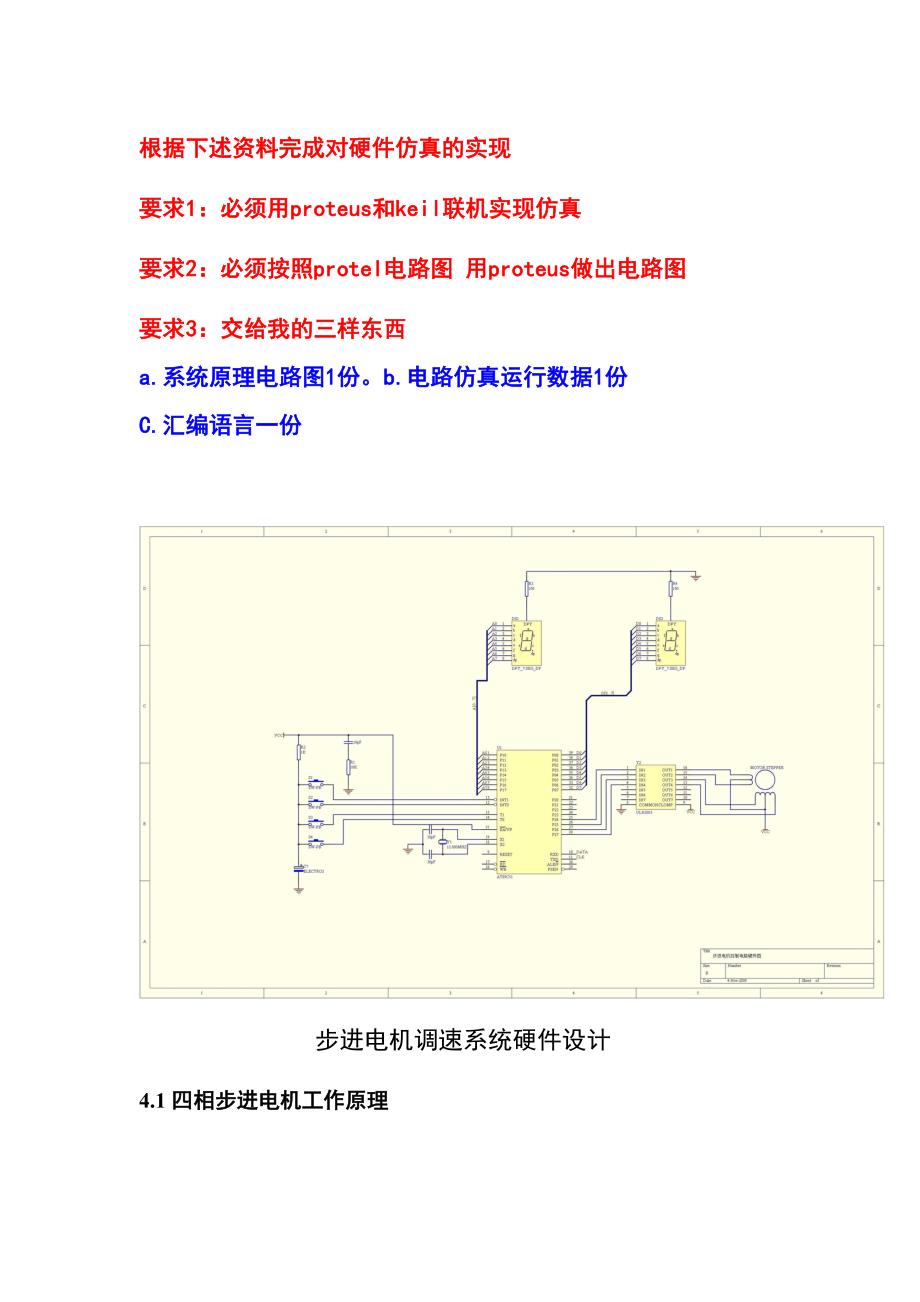
1、根据下述资料完成对硬件仿真的实现要求1:必须用proteus和keil联机实现仿真要求2:必须按照protel电路图 用proteus做出电路图要求3:交给我的三样东西 a.系统原理电路图1份。b.电路仿真运行数据1份 C.汇编语言一份 步进电机调速系统硬件设计4.1 四相步进电机工作原理本设计所采用的是国产20BY-0型步进电机,它使用+5V直流电源,步距角为18度。电机线圈由四相组成,即A、B、C、D四相,驱动方式为二相激磁方式,电机示意图和各线圈通电顺序如图4.1和表4.1所示:图4.1 步进电机原理图表4.1相顺序ABCD01100101102001131001相顺序从0到1称为一步,
2、电机轴将转过18度,01234则称为通电一周,转轴将转过72度,若循环进行这种通电一周的操作,电机便连续的转动起来,而进行相反的通电顺序如4321将使电机同速反转。通电一周的周期越短,即驱动频率越高,则电机转速越快,但步进电机的转速也不可能太快,因为它每走一步需要一定的时间,若信号频率过高,可能导致电机失步,甚至只在原步颤动。4.2 硬件设计方案本设计采用51单片机AT89C51(晶振频率为12MHZ)对该四相六线制步进电机(内阻33欧,步进1.8度,额定电压12V)进行控制。通过I/O口输出的具有时序的方波作为步进电机的控制信号,信号经过特定芯片驱动步进电机。本文选用ULN2003构成步进电
3、机的驱动电路,下面但见介绍下ULN2003的结构和特点:ULN2003 是高耐压、大电流达林顿陈列,由七个硅NPN 达林顿管组成。该电路的特点如下:ULN2003 的每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。ULN2003 工作电压高,工作电流大,灌电流可达500mA,并且能够在关态时承受50V 的电压,输出还可以在高负载电流并行运行。ULN2003 采用DIP16 或SOP16 塑料封装。ULN2003方框图如图4.2所示。4.2 ULN2003内部方框图利用ULN2003以及AT8
4、9C51设计的步进电机驱动电路如图4.3所示。图4.3 ULN2003和AT89C51构成的驱动电路51的25-28口接ULN2003的1-4输入端。另外,用键盘来对电机的状态进行控制。在上述设计的基础上 ,可以用数码管显示电机的转速,采用AT89C51的P1口和P2口作为2位单个数码管的显示驱动。其电路图如图4.4所示。通过图4.2所示的AT89C51的内部变成发送数据。图4.4 显示电路图 其中两个数码管是共阴的。R3和R4是用来保护数码管,以免烧坏数码管。将图4.3和图4.4连接起来,使之实现:按下启动键S1,电机旋转,按一下加1键S2,速度增加1转/分,按一下减1键S3,速度降低1转/
5、分。本设计设置了速度范围,其速度最低和最高分别为:9转/分,75转/分,按下停止键S4,电机停转。速度值在数码管上显示出来。综合以上设计的控制电路方案,总设计方案框图如4.5所示。单片机ULN2003键盘步进电机数码管图4.5 步进电机控制电路设计框图5 步进电机调速系统的软件设计5.1 软件设计思路控制系统分2个功能模块,分别是转速设置、数码管显示速度。5.1.1 转速设置根据赋给计数器的计数初值,我们可以计算出步进电机各相脉宽信号的频率和电机转速,也可以反过来根据对电机转速要求,计算并调整计算初值。本设计中采用了12Mhz的晶振,一个机器周期是1us。其计算方法: (5.1)上式计算出了一
6、个机器周期。分子上的12是12个节拍,分母是晶振频率。所以单片机内部时钟频率为f=106hz,设计数初值为n,要求转速为15转/分(0.25转/秒),对四相步进电机而言即为5步/秒,则有: (5.2) (5.3)反过来,当计数器初值确定时,决定了电机的转速,如计数初值为0时,有电机转速为3步每秒(本设计中最慢速度);当计数初值为40000时,电机转速为1.25步每秒(本设计中最快速度)。具体设置初值及转速见表5.2。表5.2 转速设置表步速转速(转/秒)计数初值30.1533333350.25200000150.7566667251.25400005.1.2 数码管显示因为本设计中采用的数码管
7、是共阴的,所以当AT89C51的对应管脚发送的是高电平信号,数码管中对应的LED就亮起来。本设计中的相应速度档次不涉及小数点,故数码管的dp位无论在何时均为低电平。数码管的各个数字显示二进制代码如表5.3所示: 表5.3 数码管的显示原理数字要亮的LED相应P0/P1输出的二进制及16进制0abcdef11111100、FCH1bc01100000、60H2abdeg11011010、DAH3abcdg11110010、F2H4bcfg01100110、66H5acdfg10110110、B6H6acdefg10111110、BEH7abc11100000、E0H8abcdefg1111111
8、0、FEH9abcdfg11110110、F6H只要将当前的转速在对应的时刻送到P0及P1即可,其中P1存储的是个位的数字,而P0存储十位的数字。5.2 程序流程图及其汇编程序5.2.1 程序流程图根据上述的设计思路,结合51单片机的设计原则,可以得出如图4.6所示的程序流程图。YESYESYESNONONONOYES系统初始化开始显示转速等待按键选择按S1按S3按S2按S4开启定时计数器,开启电机修改定时计数器初值,电机转数加1转/分修改定时计数器初值,电机转数减1转/分停止定时计数器,停止电机图5.6 程序流程图5.2.2 汇编程序及注释 STARTbit01H ;起动及停止标志MinSp
9、d EQU 9 ;起始转动速度MaxSpdEQU 75 ;最高转动速度Speed DATA 23H ;流动速度计数ORG 0000HLJMP DJSDORG 0010HLJMP MAINORG 0030HMAIN: MOVSPEED,#MinSpd ;起始转动速度送入计数器CLRStartEnd ;停转状态MOV TMOD,#00000001B SETB EASETB ET1LOOP:ACALLKEY ;键盘程序JNBP0,m_NEXT1 ;无键继续ACALLKEYPROC ;否则调用键盘处理程序m_NEXT1:MOV A,SpeedMOV B,#10DIV ABCMP A,#0 ;若寄存器A
10、中存储的是0,跳转至DISPS0,P0置FCHJE DISPS0CMP A,#1JE DISPS1CMP A,#2JE DISPS2CMP A,#3JE DISPS3CMP A,#4JE DISPS4CMP A,#5JE DISPS5CMP A,#6JE DISPS6CMP A,#7JE DISPS7CMP A,#8JE DISPS8CMP A,#9JE DISPS9DISPS0: ;DISPS0DISP9,让数码管显示09的特定数MOV P0,#0FCHJMP NextDISPS1:MOV P0,#060HJMP NextDISPS2:MOV P0,#0DAHJMP NextDISPS3:M
11、OV P0,#0F2HJMP NextDISPS4:MOV P0,#066HJMP NextDISPS5:MOV P0,#0B6HJMP NextDISPS6:MOV P0,#0BEHJMP NextDISPS7:MOV P0,#0E0HJMP NextDISPS8:MOV P0,#0FEHJMP NextDISPS9:MOV P0,#0F6HJMP NextCMP B,#0 ;若寄存器B中存储的是0,跳转至DISPS0,P1置FCHJE DISPG0CMP B,#1JE DISPG1CMP B,#2JE DISPG2CMP B,#3JE DISPG3CMP B,#4JE DISPG4CMP
12、B,#5JE DISPG5CMP B,#6JE DISPG6CMP B,#7JE DISPG7CMP B,#8JE DISPG8CMP B,#9JE DISPG9DISPG0: ;DISPS0DISP9,让数码管显示09的特定数MOV P1,#0FCHJMP NextDISPG1:MOV P1,#060HJMP NextDISPG2:MOV P1,#0DAHJMP NextDISPG3:MOV P1,#0F2HJMP NextDISPG4:MOV P1,#066HJMP NextDISPG5:MOV P1,#0B6HJMP NextDISPG6:MOV P1,#0BEHJMP NextDISP
13、G7:MOV P1,#0E0HJMP NextDISPG8:MOV P1,#0FEHJMP NextDISPG9:MOV P1,#0F6HJMP NextNext:MOV A,Speed JB START,m_Next2CLR TR1 ;关闭电机JMP LOOPORL P2,#11110000Bm_Next2:SETB TR1 ;启动电机AJMPLOOP ;主程序结束KEYPROC: MOVA,B ;获取键值 JBACC.0,StartStop ;分析键的代码,某位被按下,则该位为1 JBACC.3,KeySty JBACC.1,UpSpd JBACC.2,DowSpdAJMPKEY_RETS
14、tartStop:SETB StartEnd ;启动AJMPKEY_RETKeySty: CLR StartEnd ;停止AJMPKEY_RETUpSpd:INC SPEEDMOVA,SPEEDCJNEA,#MaxSpd,K1 ;到了最多的次数?DECSPEED ;是则减去1,保证下次仍为该值K1:AJMPKEY_RETDowSpd:DEC SPEEDMOVA,SPEEDCJNEA,#MAXSPD,KEY_RET ;不等(未到最大值),返回 MOV SPEED,#MinSpd;KEY_RET: RETKEY:MOV A, P2MOV B, ARETDjZS: ;定时器T1用于电机转速控制PUS
15、H ACCPUSH PSWMOV A,SpeedSUBB A,#MinSpd ;减基准数MOV DPTR,#DjHMOVC A,A+DPTRMOV TH1,AMOV A,SpeedSUBB A,#MinSpdMOV DPTR,#DjLMOVC A,A+DPTRMOV TL1,AMOV A,DjCountCPL AORL P2,AMOV A,DjCountJNB ACC.7,d_Next1JMP d_Next2d_Next1:MOV DjCount,#11110111Bd_Next2:MOV A,DjCountRL AMOV DjCount,A ;回存ANL P2,APOP PSWPOP ACCRETIDjH: DB D8, DA,DB,DD,DE,DF, E0,DjL: DB F0,71,D5,1F,54,73,80,
 根据下述资料完成对硬件仿真的实现(DOC 13页)
根据下述资料完成对硬件仿真的实现(DOC 13页)