 电动汽车加速踏板控制策略
电动汽车加速踏板控制策略

《电动汽车加速踏板控制策略》由会员分享,可在线阅读,更多相关《电动汽车加速踏板控制策略(10页珍藏版)》请在装配图网上搜索。
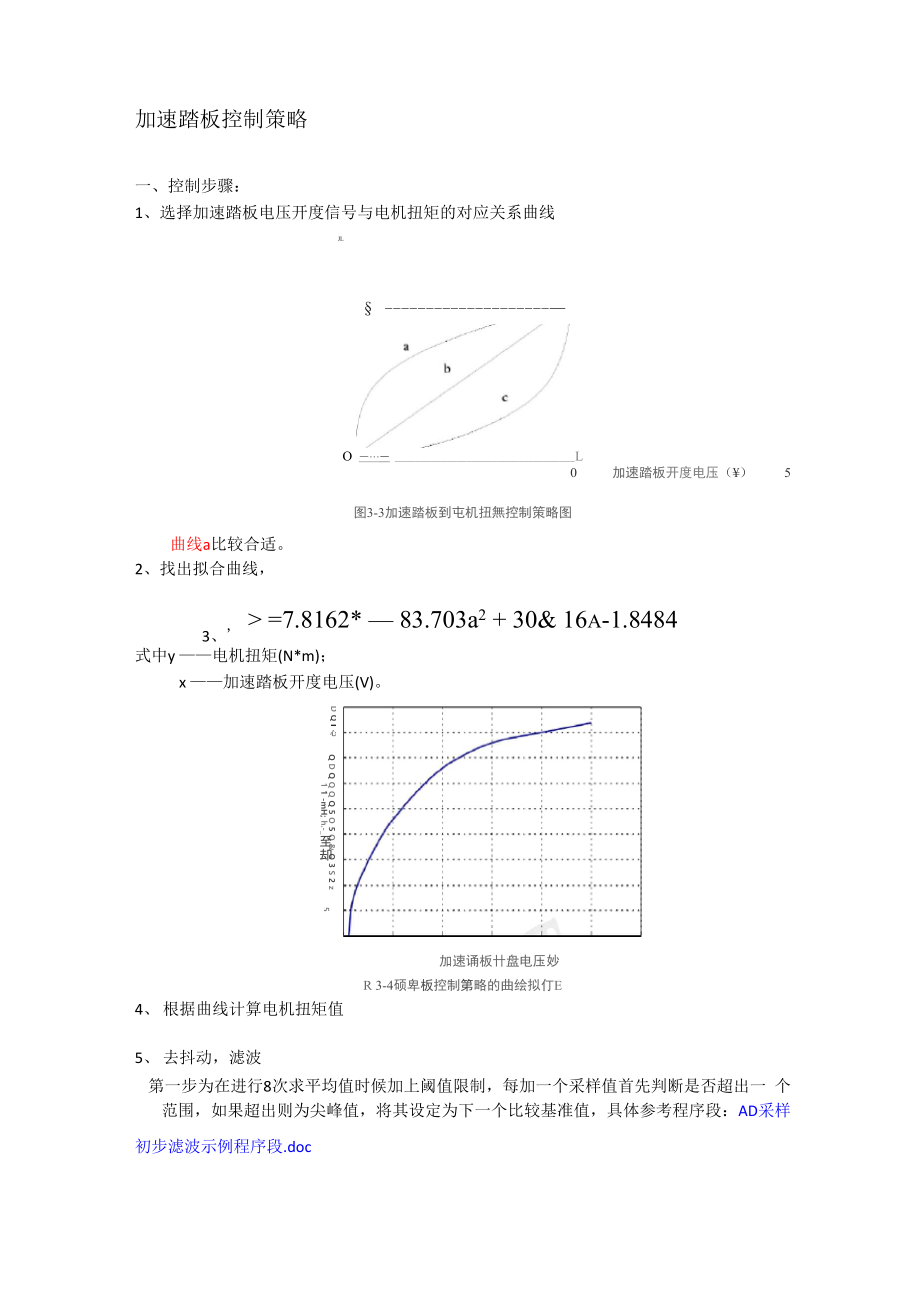
1、加速踏板控制策略一、控制步骤:1、选择加速踏板电压开度信号与电机扭矩的对应关系曲线JLO 一一L0加速踏板开度电压()5图3-3加速踏板到屯机扭無控制策略图曲线a比较合适。2、找出拟合曲线, =7.8162* 83.703a2 + 30& 16a-1.84843、式中y 电机扭矩(N*m);x 加速踏板开度电压(V)。加速诵板卄盘电压妙R 3-4硕卑板控制第略的曲绘拟仃ED Q I 心Q D Q Q Q Q 5 O 5 Q & O 3 S 2 z 1 1 -mH; h.-_至却54、根据曲线计算电机扭矩值5、去抖动,滤波第一步为在进行8次求平均值时候加上阈值限制,每加一个采样值首先判断是否超出
2、一 个范围,如果超出则为尖峰值,将其设定为下一个比较基准值,具体参考程序段:AD采样初步滤波示例程序段.doc去抖的一种方法是同样的模拟信号用两路AD进行采集,目前的电路板有一路AD是给 转向单元准备的,可以考虑用在加速踏板上面。、软件流程图:E:电动汽车论文软件功能相关-纯电动中巴车整车控制及仿真研究.kdh, 3.2.1 节3.2.1加速踏板控制策略整车控制器从加速踏板采集的是模拟量05V电压信号,之后整车控制器通过一定的 算法,计算出对应输出的电机扭矩值,再通过CAN总线发送给电机控制器。车辆的加速特 性就取决于整车控制器中所采用的算法。加速踏板电压开度信号和电机扭矩有三种常见的对 应关
3、系。对应关系图如图3-3所示。0加速踏脈”度电怖(V.i 5图3強加述踏板到赳机扭业控制策略闻图中三条曲线a、b、c分别表示三种不同的加速踏板控制策略曲线。a条曲线代表硬 踏板控制策略,b条直线表示线性踏板控制策略,c条曲线代表软踏板控制策略。一般常用 的是前两种控制策略。两种策略各有优缺点,a种控制策略汽车起步时更快,更有劲,也更 于换挡,驾驶感觉比较好。但对应函数关系较复杂处理的过程中计算量过大,响应特性较差; b种线性踏板控制策略,函数关系处理比较简单,但是在汽车的加速性上偏慢,司机驾驶感 觉差一些。现分别介绍两种控制算法也就是加速踏板曲线。线性控制策略处理起来比较简单,只需要找到固定的
4、比例系数就可以。硬踏板非线性控制策略处理起来比较复杂,需要一些理论和实验相结合得到一些数据, 再通过拟合得到硬踏板控制策略曲线,曲线图形如下图3-4所示。曲线通过EXCEL表格拟合得到近似的曲线,因为是拟合曲线,所以从相似度高低依次 可以得到几种曲线。这就需要综合考虑选择更合适的一种。这里采用多项式的趋势曲线,采 用更高次的方程相似度会更高一些,但同时计算量更大一些;而选用低次的方程相似度又会 差一些,所以综合考虑选择三次方程组。拟合曲线的方程为三次方程组,曲线的方程如公式3-1所示。 =7.8162-83.703? + 308.164-1.8484式中y 电机扭矩(N*m);x 加速踏板开度
5、电压(V)。-占5-尹3_jJ123JE加速躋板开废电压w#005o o O6 0 52 2 1rd 6 2加速丿j筛策略可:卓国團3-4便齬板控制第略対樹线执合團从曲线还可以看出,刚开始轻微踩踏板时没有扭矩。这样做的目的是考虑到人们的驾驶 习惯,开车的时候,脚会习惯性放在加速踏板上,如车辆在行驶过程中遇到红灯停下来,这 时车还在抖动,脚也随着抖动,连带着踏板也会抖动,这时就会出现电机空转,电机所做的 功是无用的。还有就是从安全角度看,更利于控制。所以在软件编程中,加速踏板轻微开度 不产生扭矩。E:电动汽车论文软件功能相关-电动汽车分布式控制系统的总线调度与整车控制策略的研究.kdh 6.1.
6、16.1.1加速力矩控制策略加速力矩控制策略直接影响到整车驾驶的 动力性和舒适性。从加速踏板米集到0-5V信 号,经过标定程序转换得到相对踏板位置的比 率,经过一定函数运算,计算出加速踏板对应的 加速力矩。函数关系可以是线性直线,也可以是 曲线。线性函数关系处理比较简单,但是在汽车 的加速性上偏慢,复杂的函数关系在处理的过程 中计算量过大。通过归一化的处理方法,采用了 简单的函数关系来表示,如图6-2所示。图中 曲线A、B和C分别表示了三种加速踏板策略: 硬踏板策略、线性踏板策略和软踏板策略。实际 上等同于加速踏板信号的比例,反映了踏板的位 置。通过道路试验选取了曲线A。这条曲线基 本满足加速
7、的需求,在中负荷司机的驾驶感觉也良好,在小负荷时考虑到力矩的需求比较小, 踏板的行程很小,如果按照这条曲线,司机的操控性不好,所以通过试验修改了曲线在小负 荷状态下的曲线特性,以保证低速行驶的稳定性。结合电机的外特性曲线和加速踏板回零的制动需求,电机驱动的范围如图6-3所示。 图中上曲线是电机的外特性曲线,也就是电机在额定功率下运行的理想曲线,分为恒扭距和 恒功率两个区间,额定转速为3600r/min。下曲线是在踏板回零时电机制动的曲线,考虑到 电机在小转速时无法起到回馈的效果,制动结束点选取在800r/min左右。通过试验发现此 时的回馈电流很小,可以忽略。考虑到电机的转速过高时制动功率过大
8、对电池的充电冲击很 大,所以基本不回馈制动。制动起始转速为4500r/min,当然该点实际上与电池状态有关。 其值是在电池电量比较足的情况下试验调整的,它应该随着电池的电压的下降而增大,这需 要做很多试验。有了图6-3的驱动力矩的范围曲线,驱动力的计算就可以很容易的根据加 速特性曲线而得到。E:电动汽车论文软件功能相关:纯电动车整车控制策略的研究.nh 3.4.13.4.1加速踏板信号处理加速踏板作为整车最重要的输入量之一,其信号的变化直接反映了驾驶员的操作意图。 其输出信号应满足以下要求:稳定性、连续性、单调性和适应性。如果信号出错,将导致车 辆失控,甚至出现严重的安全问题。鉴于加速踏板信号
9、如此的重要,本文所采用的加速踏板 安装了两路传感器,这两路传感器都属于电位计传感器。两组传感器输出的信号行程不一样, 但是传感器的输出信号和加速踏板开度成线性关系,不同特征的物理信号输入整车控制器得 到的加速踏板开度应该是一致的。这样的好处是,增加系统的冗余度,提高系统的故障诊断 逻辑,提高了加速踏板信号的可靠性。图3-7为加速踏板信号处理流程。其主要处理流程是:1)将加速踏板输出的电压进行A/D转换得到采样值;2)诊断标定,若采样值超出有效范围,贝y放弃此采样值;3)对采样值进行滑移平均滤波,达到有效值;4)对滤波后的有效值进行加速踏板开度计算,得到加速踏板开度及其变化率图3-7如速踏板佔号
10、处班愉入输出示意罔加速踏板开度函数表达式:10()v - r虫 itJTJHifJ0C屮V(k) !:ii遽踏板仁莎忙代:扭速踏板信号有效采样最小阈值;%、加速踏板信号有效采样是大阈值。由于加速踏桩信号10ms进行一次采样,时间短暂,故认为加速踏桩开 度斐化率? J 111速踏板,I度I旳文化,J匸函数衣达式为:加)的-(A-1)(芥 10)纯电动轿车动力总成控制系统的研究.kdh3.1加速踏板控制策略3.1.1正常状态下加速踏板的输出加速踏板信号是整车最重要的模拟信号之一,其反映了司机的驾驶意图,直接关系车辆 控制器PTCM对电机控制器DMCM送出的扭矩指令,如果该信号出错,将导致车辆失控,
11、 甚至出现严重安全问题,鉴于其重要性,本文对纯电动汽车的电子油门采用了两组传感器, 以增加系统冗余度,如图3-2, 3-3所示,两组传感器的信号特征是不同的,这样做的好处 在于可以增加故障诊断逻辑,不同物理信号特征的传感器输入得出的结果应该是一致的,增U !川速踏板2、位段传感器PPS1 3,位国亿感器PPS2團3-2加速踏械結构葩圏團3-3 如速踏坂输入信号Fig. 3-2 Structure of Ac cel eratoi- p edalFig 3-3 ignnl ot Accelerator pedal动力总成对加速踏板信号的处理,需要考虑1)整车对加速踏板响应的要求;2)对输 入信号
12、模拟量如何进行处理。在PTCM的硬件采样电路中,对传感器的输入信号可采用 5ms、10ms、50ms等不同等级的采样频率,对图3-3中的两组加速踏板传感器PPS1及 PPS2,PTCM采用了最高等级的频率5ms采样,即每秒采集200个输入信号,这对于驾驶 员的动作响应及硬件诊断已经足够。在控制程序中,PTCM不断的对这5ms的中断信号进 行监测,只要原始信号出现任何异常,PTCM立即能发现。由于传感器为模拟信号输入,在 电动汽车的使用环境里,模拟信号易受干扰造成脉冲尖锋而超限溢出,由于加速踏板的运动 是连续的,为了过滤脉冲干扰,对当前加速踏板APP (k)的值采用了增量式调节的方式,即APPk
13、) -估一1)其中AAPP(k)的值有正有负,为防止脉冲干扰,对加速踏板输入信号的增量A APP(k)采 用限步长的处理方式,将当前的增长量与标定的步长增长量限制值maxAAPP(k)相比较,若 小于步长限制,贝9保持原值输出,若超出限制值,贝9以最大步长增长量maxAAPP(k)输出。 maxAAPP(k )为预先存储于非易失性存储器里对于每一采样周期内加速踏板的最大变化量, 需要由标定来确定。为了防止干扰,导致不正常的值出现,确保行车安全,必须对加速踏板的最终输出量进 行幅值上下限处理,本文在控制程序里对加速踏板的值进行逻辑门限制。设minAPP, maxAPP 为标定的加速踏板0100%
14、开度对应的最小值最大值,若输出的APP (k)超出minAPP maxAPP的范围,则取边界值。经过上述处理,可分别得到两个驾驶踏板的输入值APP1 ( k)及APP2( k),动力总成控制 程序里所应采用的加速踏板的值是对两个传感器输入综合处理的结果,为此引入权系数。设APP1_Wgh, APP2 _Wgh分别为传感器1及传感器2对应的权系数,令APP1_Wgh+ APP2_Wgh=1 ;根据故障标志位,确定APP1、APP2信号的权系数,以决定两信号对最终加 速踏板位置的贡献。如果所有标志位都未树立,即正常情况下,APP1 ( k)= APP2(k), APP1_Wgh= APP2_Wgh
15、 =1/2,最终送出的加速踏板值为APP_ Cunaitk) = APPlJVgh 冰月尸尸1(咼十 APP2 _ Wgh 來眉尸尸2(4)3.1.2加速踏板信号的诊断与失效处理在采用传感器信号进行控制算法前,电控系统必须对每一个传感器的输入信号进行诊 断,只有正常的信号才能为控制程序所用。本系统采用两组加速踏板传感器,增加了信号诊 断的复杂性,但若采用适当的诊断策略将更能提高系统的可靠性,为此本文研究了电路诊断 及合理性诊断的策略。加速踏板传感器的开路短路检查读入加速踏板传感器的两个电位计信号的原始值PPS1、PPS2(Pedal Position Sensor);对 每个电位计读入信号进行
16、有效性检查,即看输入信号是否在各自的正常范围 (93%*Vref7%*Vref,具体值需通过标定决定),以确定传感器是否短路或断路。引入故障计 数器OutOfRng1和OutOfRng2,当APP1、APP2信号超出正常范围,信号值取边界值,相 应的故障计数器增加一个标定量值Cont_OORUp;如果APP1、APP2信号没有越界,则相 应故障计数器减去一个标定量值Cont_OORDown。并对故障计数器进行范围限制,以免溢 出,即0标定上界。加速踏板传感器的复位和复位相关性检查i、将两个电位计信号APP1、APP2进行可比性转化,如将APP2信号化成和APP1信 号具有相同的偏移量和相同的斜
17、率,以利于两个信号具有可比性(可以通过标定Map图直 接查找对应的APP1值);ii、其次自学习最小信号值,将读入信号和储存的两个最小值MinAPP1、MinAPP2 (初 值通过标定处理)进行比较,如果小于储存值,用当前值替换储存值。同时将学习的最小值 作为新的起点值。(最小值的学习,可以用于处理以后的踏板信号);iii、 检查各自最小信号值是否是有效的最小机械位置MSV1、MSV2 ( Minimum MechanicalPosition),引入故障计数器OutOfMSV1和OutOfMSV2,无效时,相应故障计数 器增加一个标定量值Cont_OORUp,反之则减去一个标定量值Cont_O
18、ORDown。并对故障计 数器进行范围限制,以免溢出。iv、进行最小值关联性检查,引入关联故障计数器 OutOfCor12。如果MINAPP1和 MINAPP2的差别超过标定容忍极限MINTOL ( | MINAPP1 MINAPP2|MINT0L),计数器增 加一个标定量值Cont_OOCUp,反之,则减去一个标定量值Cont_OOCDown。同时对故障 计数器进行范围限制,以免溢出。加速踏板传感器对应位置相关性检查通过MINAPPx将相应的加速踏板信号APPx转换成各自对应的加速踏板开度 APP1D、APP2D,引入关联故障计数器DIS12。如果APP1D和APPSD的差别超过标定容忍 极
19、限DTOL,计数器增加一个标定量值Cont_OOCUp,反之,则减去一个标定量值 Cont_OOCDown。同时对故障计数器进行范围限制,以免溢出。树立相应故障标志位,决定权系数将6个故障计数器和各自的阈值进行比较,确定是否该树立相应的故障标志位 APP1_OOR_Flag、APP2_OOR_Flag、APP12_Cor_Flag,和相应的 Service_Soon_Flag。同时检查 加速踏板传感器信号是否正常变化,如果加速踏板长期保持在一个值,则竖立相应故障标志 位 APP1_Fail_Flag 和 APP2_Fail_Flag。APP1、APP2对应的权系数分别为APP1_Wgh、APP
20、2_Wgh;根据故障标志位,确定APP1、 APP2信号的权系数,以决定两信号对最终加速踏板位置的贡献。如果所有标志位都未树立,则 APP1_Wgh=APP2_Wgh =1/2;如果 APP1_00R_Flag 或 APP1_Fail_Flag 树立,则 APP1 的 系数APP1_Wgh为0; APP2的性能故障标志位没有竖立,同时关联故障标志位放倒,则 APP2的权系数APP2_Wgh为1,反之则APP1_Wgh为1;如果两个信号都未越界,出现 关联故障标志位,则对应加速踏板位置小的权值为1。(也可取 Wx = F(OutOfRngx、OutOfMSVx、OutOfCor12、DIS12)
21、,这样权系数变化更多)。图34、35、36、3 7、3 8表示了对加速踏板的诊断控制逻辑。图3T加速踏板的输出控制逻辑Fig. 3 -4- ATP out pul couinil logic图3-5加速踏蜕的极值诊断Fig.3 -5 APP hieli/low circuit diagnosis1團3-6参考电压的枫值诊断Fig.3-6 Referenced voltage high/low ciixnit diagnosis圈3-7相关联性诊断Fig.3-7 CoiTelation diagnosis logicAmU11A图3 K加速踏抚开度值输出暹辑Fig.3-8 APP value output loiu
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
