《自动控制理论实验报告四》由会员分享,可在线阅读,更多相关《自动控制理论实验报告四(5页珍藏版)》请在装配图网上搜索。
1、实验十二 数字PID控制实验、实验目的1. 了解数字PID控制的特 点,控制方式2. 理解和掌握连续控制系统 的PID控制算法表达式(微分方程)。3. 了解和掌握被控对象数学 模型的建立方法。4. 了解和掌握数字PID调节 器控制参数的工程整定方 法。5. 了解和掌握用试验箱进行 数字PID控制过程。6. 观察和分析在标PID控制 系统中,P、I、D参数对 系统性能的影响。二、实验原理及说明1、数字PID控制一个控制系统中采用比 例积分和微分控制方式控 制,称之为PID控制。数字 PID控制器原理简单,使用 方便适应性强,可用于多种 工业控制,鲁棒性强。可以 用硬件实现,也可以用软件 实现,也
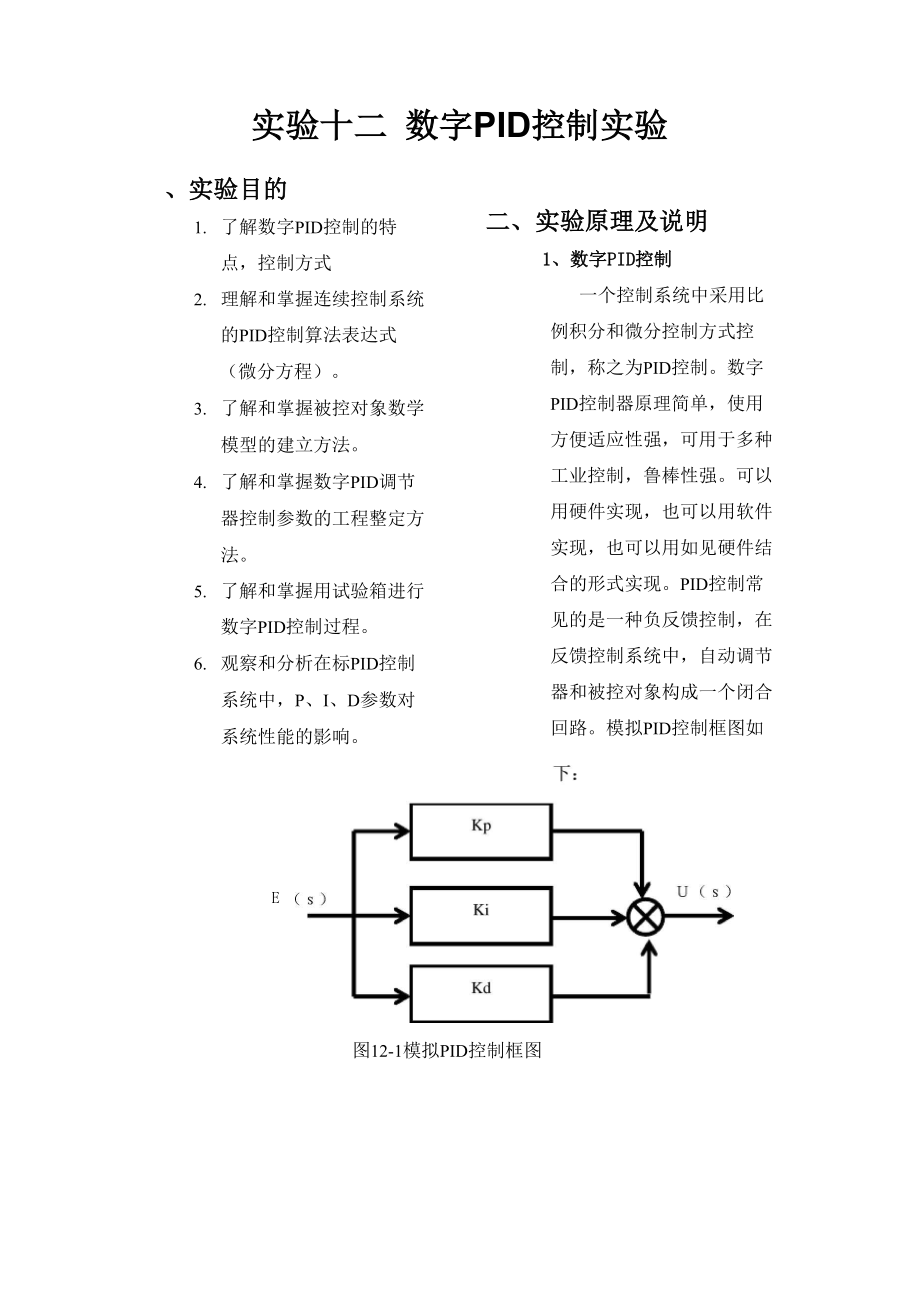
2、可以用如见硬件结 合的形式实现。PID控制常 见的是一种负反馈控制,在 反馈控制系统中,自动调节 器和被控对象构成一个闭合 回路。模拟PID控制框图如E图12-1模拟PID控制框图G (s) = K x0 0输出传递函数形式:D(s) = UL )= K + K - +1K sE(s)p i s d其中Kp为调节器的比例系数, Ti为调节器的积分常数,Td是调节 器的微分常数。2、被控对象数学模型的建立1) 建立模型结构在工程中遇到的实际对象大多 可以表示为带时延的一阶或二价惯 性环节,故PID整定的方法多从这样 的系统入手,考虑有时延的单容被控 过程,其传递函数为:G (s) = K x1
3、e-Ts00 TS+10这样的有时延的单容被控过程可 以用两个惯性环节串联组成的自平 衡双容被控过程来近似,本实验采用 该方式作为实验被控对象,如图 3-127所示。1 1x TS +1 TS+11 22) 被控对象参数的确认 对于这种用两个惯性环节串联组成 的自平衡双容被控过程的被控对象, 在工程中普遍采用单位阶跃输入实 验辨识的方法确认T和T,以达到转0换成有时延的单容被控过程的目的。3) 采样周期的选择采样周期选择0.05s。4、数字PID调节器控制参数的 工程整定方法虽然PID调节可全面、综合的考 虑系统的各项性能,但在工程实际 中,考虑到工程造价和调节器的易于 实现,长采用PID三个
4、参数来对系统 进行校正。等效有时延单容被控对象 的参数T和T,利用科恩库恩经验公0式,可求得比例,比例-积分,比例- 积分-微分的参数。K =丄1.35 / T )-1 + 0.27p K002.5(t / T) + 0.5(t / T )2T = T X00 -i 01 + 0.6(t / T)05、数字PID调节器控制特性1) 比例控制是一种最简单的控 制方式,其控制的输出与输入误差信 号成比例关系。当仅有比例控制时系 统输出存在稳态误差。如果系统是稳 定的,增大比例调节的增益,可以减 小系统的稳态误差。2) 积分控制中,控制器的输出 与输入误差信号的积分成比例关系。 对一个自动控制系统,
5、如果在进入稳 态后存在稳态误差,为了消除稳态误 差,在控制器中引入积分项。增大积 分系数,提高系统的稳态控制精度, 但太大会引起系统不稳定。3)微分控制中,控制器的输出 与输入误差信号的微分成正比关系。 当存在较大的惯性组件或有滞后组 件时,可能会出现震荡甚至不稳定。 加入微分具有克服积分调节作用缓 慢性,避免积分作用可能降低系统响 应速度的缺点。对变化落后于误差变 化的系统,需要增加微分性,它能预 测误差变化的趋势。(1)按照模拟电路图连接(二:=2)。(2)运行、观察、记录。经过不断地调整Kp、Ti、Td, 最终得到符合要求的波形。此时:Kp=1.3、Ti=0.8、Td=0.053最终调试
6、输出波形:三、实验内容及步骤敕权伶彳矽初上必煤就裁空电苇裟2习述道3邂躯m籾稻删:Toj恥li:图12-2 数字PID闭环控制系统实验模拟电路图应曲线就険詐蘇T H就啓駆0确d购数字PID闭环控制系统实验数字PID闭环控制系统的构成如 下图所示。此次实验将函数发生器作 信号发生器,矩形波输出施加于被测 系统的输入端匚,观察矩形波从0V 阶跃到+2.5V,时被测系统的PID控 制特性。实验步骤如下:Go(S)_ TS + 1XTS + 11 2ToTT耳Td叫21 2X 0.1S + 10.1S + 10.270.080.051.30.80.0532%0.6思考题:1. 分析思考P、I、D在工程
7、整定中的作 用及PID的实际应用。答:先将差值信号进行放大,比例增 益P就是用来设置差值信号的放大系 数的,比例增益P越大,调节灵敏度 越高,但由于传动系统的控制电路都 有惯性,调节结果达到最佳值时不能 立即停止,导致“超调”,然后反过 来调整,再次超调,形成振荡。为此 引入积分环节I,其效果是使经过比 例增益P放大后的差值信号在积分时 间内逐渐增大(或减小),从而减缓 其变化速度,防止振荡。但积分时间 I太长,又会当反馈信号急剧变化时, 被控物理量难以迅速恢复。在微分控 制中,控制器的输出与输入误差的微 分成正比关系。自动控制系统在克服 误差的调节过程中可能出现振荡甚 至失稳,其原因是由于存
8、在有较大惯 性组件或有滞后组件,具有抑制误差 的作用,其变化总是落后于误差的变 化。2. 使用PID控制中,若增加Ti是否需要改变Kp和Td的值?答:不需要,一个环节的改变不会影 响其他两个环节,但回想影响系统性 能。3. 实际应用中,是否可以选择Td比较 大?为什么?答:不可以,当Td比较大时,微分 环节增强,对噪声信号将产生放大作 用,使系统失控。4. 对不同的被控对象,如何选择PID参 数?有何规律?答:P、I、D参数的预置是相辅相成 的,运行时应根据实际情况进行如下 细调:被控物理量在目标值附近振 荡,首先加大积分时间I,如仍有振 荡,可适当减小比例增益P,被控物 理量在发生变化后难以恢复,首先加 大比例增益P,如果恢复仍较缓慢, 可适当减小积分时间I,还可加大微 分时间Do
 自动控制理论实验报告四
自动控制理论实验报告四