 控制系统的分析PPT课件课件
控制系统的分析PPT课件课件

《控制系统的分析PPT课件课件》由会员分享,可在线阅读,更多相关《控制系统的分析PPT课件课件(31页珍藏版)》请在装配图网上搜索。
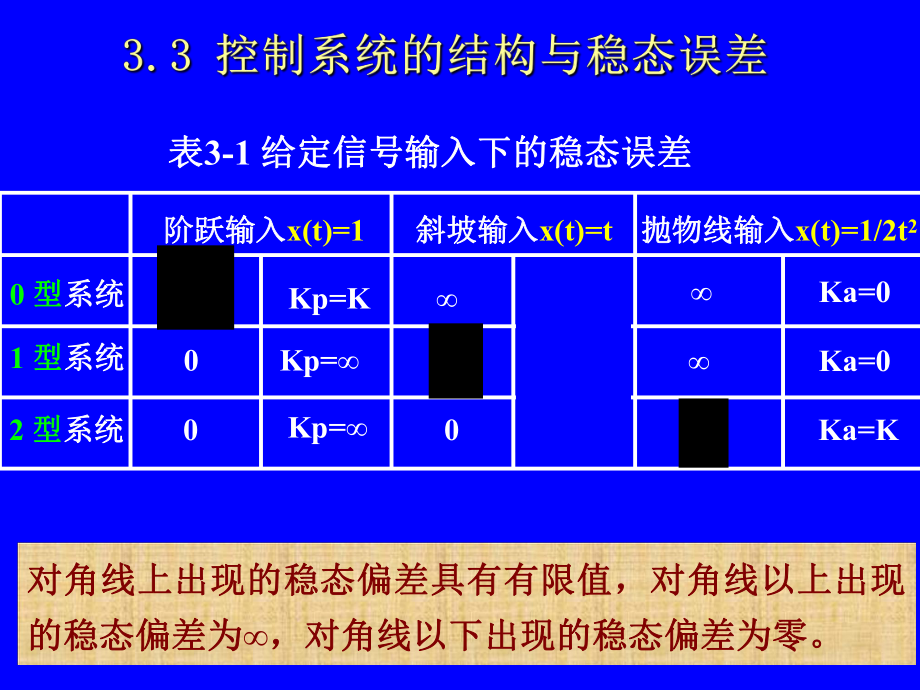
1、控制系统的分析PPT课件 表表3-1 给定信号输入下的稳态误差给定信号输入下的稳态误差阶跃输入阶跃输入x(t)=1 斜坡输入斜坡输入x(t)=t 抛物线输入抛物线输入x(t)=1/2t2 11 KKp=K Kv=0 Ka=0 Kp=0K1Kv=K Ka=0 0 型型系统系统 1 型型系统系统 2 型型系统系统 Kp=00Kv=K1Ka=K 对角线上出现的稳态偏差具有有限值,对角线以上出现对角线上出现的稳态偏差具有有限值,对角线以上出现的稳态偏差为的稳态偏差为,对角线以下出现的稳态偏差为零。,对角线以下出现的稳态偏差为零。控制系统的分析PPT课件控制系统的分析PPT课件 所以系统可看成是若干称为
2、典型环节的基本因子的乘积,所以系统可看成是若干称为典型环节的基本因子的乘积,常用的典型环节有常用的典型环节有6 6种,分析清楚典型环节。对系统分析和设种,分析清楚典型环节。对系统分析和设计研究带来很大的方便。计研究带来很大的方便。12 201112212 2011122(1)(21)(1)()()()(1)(21)(1)mmmminnnnjbsbsb s bssssC sGsKR sasasaaTsT ssTs()()()C sG s R s输出信号即传递函数 输入信号()()()c tg t r t但没有输出信号冲激响应 输入信号控制系统的分析PPT课件一阶系统对典型输入信号的响应一阶系统对
3、典型输入信号的响应输入信号输入信号时域时域输入信号输入信号频域频域输出响应输出响应传递函数传递函数11(t)t0tTeTtTt0)1(2122teTTttTt01teTt)0(1teTTt)(tS121S31S221t11TS等价关系:系统对输入信号导数的响应,就等于系统对该输等价关系:系统对输入信号导数的响应,就等于系统对该输入信号响应的导数;入信号响应的导数;控制系统的分析PPT课件 一阶系统的时域分析一阶系统的时域分析用一阶微分方程描述的控制系统称为一用一阶微分方程描述的控制系统称为一阶系统。图阶系统。图3-3(a)所示的)所示的RC电路,电路,其微分方程为其微分方程为i(t)+r(t)
4、c(t)+(a)电路图RC)(trUdtduRCcc )()()(trtCtCT 其中其中C(t)为电路输出电压,为电路输出电压,r(t)为电路输为电路输入电压,入电压,T=RC为时间常数。为时间常数。当初使条件为零时,其传递函数为当初使条件为零时,其传递函数为 11)()()(TSsRsCs R(s)C(s)(c)等效方块图这种系统实际上是一个非周期性的惯性环节。这种系统实际上是一个非周期性的惯性环节。下面分别就不同的典型输入信号,分析该下面分别就不同的典型输入信号,分析该系统的时域响应。系统的时域响应。控制系统的分析PPT课件单位阶跃响应单位阶跃响应因为单位阶跃函数的拉氏变换为因为单位阶跃
5、函数的拉氏变换为SsR1)(,则系统的输出由下式可知为,则系统的输出由下式可知为 111111)()()(TSSSTSsRssC对上式取拉氏反变换,得对上式取拉氏反变换,得Ttetc1)(0t图3-4指数响应曲线1063.2%86.5%95%98.2%99.3%T2T3T4T5T0.632tc(t)=1-ec(t)R(s)的极点形成系统响应的稳的极点形成系统响应的稳态分量。态分量。传递函数的极点是产生系统响传递函数的极点是产生系统响应的瞬态分量。这一个结论不仅应的瞬态分量。这一个结论不仅适用于一阶线性定常系统,而且适用于一阶线性定常系统,而且也适用于高阶线性定常系统。也适用于高阶线性定常系统。
6、响应曲线在0t时的斜率为时的斜率为,如果系统输出响应的速度恒为,如果系统输出响应的速度恒为T1,则只要,则只要tT时,输出时,输出c(t)就能达到其终值。就能达到其终值。T1T1控制系统的分析PPT课件由于由于c(t)的终值为的终值为1,因而系统阶跃输入时的稳态误差为零。,因而系统阶跃输入时的稳态误差为零。动态性能指标:动态性能指标:Ttd69.0Ttr20.2误差带)%5(3Tts不存在和pt习题3-3 11212()()1/()KC ssTK KR sSK K,11221212/0.50.433/,15sKKK KKtTK KK,控制系统的分析PPT课件0tMp超调量允许误差10.90.5
7、0.1trtpts图3-2表示性能指标td,tr,tp,Mp和ts的单位阶跃响应曲线tdh(t)0.02或0.05)(h)(h)(h)(h延迟时间 :(Delay Time)响应曲线第一次达到稳态值的一半所需的时间。上升时间(Rise Time)响应曲线从稳态值的10%上升到90%,所需的时间。上升时间越短,响应速度越快 dtdt:rt峰值时间 (Peak Time):响应曲线达到过调量的第一个峰值所需要的时间。pt控制系统的分析PPT课件0tMp超调量允许误差10.90.50.1trtpts图3-2表示性能指标td,tr,tp,Mp和ts的单位阶跃响应曲线tdh(t)0.02或0.05)(h
8、)(h)(h)(h调节时间 :(Settling Time)响应曲线达到并永远保持在一个允许误差范围内,所需的最短时间。用稳态值的百分数(通常取5%或2%)作,超调量(Maximum Overshoot):指响应的最大偏离量h(tp)于终值之差的百分比,即 dtst%100)()()(%hhthp rt或pt评价系统的响应速度;st同时反映响应速度和阻尼程度的综合性指标。%评价系统的阻尼程度。控制系统的分析PPT课件 二阶系统的时域分析二阶系统的时域分析二阶系统:凡以二阶系统微分方程作为运动方程的控制系统。3.3.1 二阶系统的数学模型二阶系统的数学模型随动系统A Servo System(位
9、置控制系统)如图3-6所示。+图3-6 随动系统原理图输入电位计输出电位计rc发送反馈信号SMcia输入装置e1KAKAeLaR1R1R2i放大器 电动机齿轮传动负载误差测量装置Ra控制系统的分析PPT课件该系统的任务:控制机械负载的位置。使其与参考位置相协调。工作原理:用一对电位计作系统的误差测量装置,它们可以将输入和输出位置信号,转换为与位置成正比的电信号。+图3-6 随动系统原理图输入电位计输出电位计rc发送反馈信号SMcia输入装置e1KAKAeLaR1R1R2i放大器 电动机齿轮传动负载误差测量装置Ra输入电位计电刷臂的角位置r,由控制输入信号确定,角位置r就是系统的参考输入量,而电
10、刷臂上的电位与电刷臂的角位置成正比,输出电位计电刷臂的角位置c,由输出轴的位置确定。控制系统的分析PPT课件+图3-6 随动系统原理图输入电位计输出电位计rc发送反馈信号SMcia输入装置e1KAKAeLaR1R1R2i放大器 电动机齿轮传动负载误差测量装置Ra电位差)(crseeKe就是误差信号。:sK桥式电位器的传递函数该信号被增益常数为AK的放大器放大,(AK应具有很高输入阻抗和很低输出阻抗)放大器的输出电压作用到直流电动机的电枢电路上。电动机激磁绕组上加有固定电压。电动机激磁绕组上加有固定电压。如出现误差信号,电动机就产生力矩以转动输出负载,并使误差信号减少到零。如出现误差信号,电动机
11、就产生力矩以转动输出负载,并使误差信号减少到零。控制系统的分析PPT课件(3)当激磁电流固定时,电动机产生的力矩(电磁转距)为:amiCM )()(sICsMam(3-10):mC电动机的转矩系数:ai为电枢电流对于电枢电路eKKdtdKiRdtdiLsAbaaaa(3-11))()()()(sSKsEKKsIRSLbSAaaa:aaRL电动机电枢绕组的电感和电阻。:bK电动机的反电势常数,:电动机的轴的角位移。电动机的力矩平衡方程为:amiCMdtdfdtdJ22(3-12))()()(2sMsfSJSJ:为电动机负载和齿轮传动装置,折合到电动机轴上的组合转动惯量。f:为电动机负载和齿轮传动
12、装置,折合到电动机轴上的粘性摩擦系数。ic1 )(1)(sisc(3-13)KsKACmi1KbSr(s)E(s)E1(s)Ia(s)M(s)(s)c(s)3-113-103-12KbS(s)图3-7 随动系统方块图控制系统的分析PPT课件KsKACmi1KbSr(s)E(s)E1(s)Ia(s)M(s)(s)c(s)3-113-103-12KbS(s)图3-7 随动系统方块图开环传递函数(即前向通路传递函数)因为反馈回路传递函数为1)()()()(sEsHssGcSKCfSJSRSLiCKKifSJSRSLSKCfSJSCRSLKKbmaamASaabmmaaAS)(1)(111222(3-
13、14)如果略去电枢电感aL)1()()()(111SFJSFKFJSSKFRKCfJSSKRiCKKsGabmamAS令令)1(STSKm(3-15)amASiRCKKK 1增益abmRKCfF阻尼系数,由于)(bK电动机反电势 的存在,增大了系统的粘性摩擦。FKK1开环增益FJTm机电时间常数不考虑负载力矩,随动系统的开环传递函数简化为:)1()(STSKsGm(3-16)控制系统的分析PPT课件不考虑负载力矩,随动系统的开环传递函数简化为:不考虑负载力矩,随动系统的开环传递函数简化为:)1()(STSKsGm(3-16)相应的闭环传递函数 KSSTKsGsGsssmrc2)(1)()()(
14、)((3-17)mnnmmmTKSTKSTSTK21222为了使研究的结果具有普遍意义,可将式(3-17)表示为如下标准形式2222)()()(nnnSsRsCs(3-18)mnTK2 mnTKmnT12 KTm21n自然频率(或无阻尼振荡频率)阻尼比(相对阻尼系数)控制系统的分析PPT课件二阶系统的标准形式,相应的方块图如图3-8所示S(S+2n)n2R(s)C(s)图3-8 标准形式的二阶系统方块图_2222)()()(nnnSsRsCs(3-18)n自然频率(或无阻尼振荡频率)阻尼比(相对阻尼系数)二阶系统的动态特性,可以用和n加以描述,二阶系统的特征方程:0222nnSS(3-19)1
15、22,1nnS(3-20)3.3.2 二阶系统的单位阶跃响应二阶系统的单位阶跃响应 Unit-Step Response of Second-Order Systems阻尼比是实际阻尼系数F与临界阻尼系数的比值CmFFJKFFKJFKJKT1212212121 CF临界阻尼系数,1时,阻尼系数控制系统的分析PPT课件图3-9二阶系统极点分布左半平面001=1两个相等根jn=0d=njn=0 j右半平面1两个不等根00两个正实部的特征根 发散10,闭环极点为共扼复根,位于右半S平面,欠阻尼系统1,为两个相等的根10,虚轴上,瞬态响应变为等幅振荡,两个不相等的根(1)欠阻尼(10)二阶系统的单位阶
16、跃响应22,11nnjS令n衰减系数 dj 21nd阻尼振荡频率SsR1)(,由式(3-18)得2222)()()(nnnSsRsCs(3-18)SSSsRssCnnn12)()()(222控制系统的分析PPT课件对上式取拉氏反变换,得单位阶跃响应为sin1cos1)(2ttethddtn0)sin(1112ttedtn2222)()(1dnndnnSSSS(3-21)2211dnnddnd121稳态分量 瞬态分量arccos12 arctg稳态分量为1,表明图3-8系统在单位阶跃函数作用下,不存在稳态位置误差,瞬态分量为阻尼正弦振荡项,其振荡频率为d阻尼振荡频率 包络线211tne决定收敛速
17、度0时,0sin1)(ttthn(3-23)这是一条平均值为1的正、余弦形式等幅振荡,其振荡频率为n故称为无阻尼振荡频率。由系统本身的结构参数确定 控制系统的分析PPT课件(2)(2)临界阻尼临界阻尼(1)SsRttr1)(,)(1)(nnnnnSSSSSsC1)(11)()(222临界阻尼情况下的二阶系统的单位阶跃响应称为临界阻尼响应0)1(11)(tteetethnttntnnn(3-24)当1时,二阶系统的单位阶跃响应是稳态值为1的无超调单调上升过程,tnnedttdh2)(控制系统的分析PPT课件(3)过阻尼()1122,1nnSSSSSSSSSsCnnnn)1()1(1)()(222
18、212)1()1(23221nnASASA11A)1(122nSA)1(121223A0)1(121)1(1211)()1(22)1(2222teethttnn jS1S2衰减快慢基本上由S1决定图3-10二阶系统的实极点0控制系统的分析PPT课件020040060080010001200140000.20.40.60.811.21.41.61.82图3-11表示了二阶系统在不同值瞬态响应曲线(书上图3-10 P87)控制系统的分析PPT课件3.3.3 二阶系统阶跃响应的性能指标欠阻尼情况在控制工程中,除了那些不容许产生振荡响应的系统外,通常都希望控制系统具有适度的阻尼、快速的响应速度和较短的
19、调节时间。二阶系统一般取7.0,8.04.0 其它的动态性能指标,有的可用n和精确表示,如%,prtt,有的很难用n和准确表示,如sdtt,可采用近似算法。控制系统的分析PPT课件在式(3-21)中,即0,)sin(111)(2ttethdtndt 令arccos1,5.0)(2arctgthd221)arccos1sin(2ln1dndntt书P88,在较大的值范围内,近似有 ndt22.06.01(3-26)书(3-19)式10时,亦可用ndt7.01控制系统的分析PPT课件rt 1)(rth,求得 0)sin(112rdttenrdtdrt一定,即一定,rtn,响应速度越快)(峰值时间p
20、t 对式(3-21)(书3-14)求导,并令其为零,求得0,)sin(111)(2ttethdtn(3-21)控制系统的分析PPT课件0)cos()sin(tetedtddtnnn21)(ttgd 21tg ,2,0pdt,根据峰值时间定义,应取ptd)293(21221 dddpTt)(峰值时间pt对式(3-21)(书3-14)求导,并令其为零,求得0,)sin(111)(2ttethdtn(3-21)pt距离越远)(闭环极点离负实轴的一定时,n控制系统的分析PPT课件的计算,超调量pMor%超调量在峰值时间发生,故)(pth即为最大输出)sin(111)(2pdtptethpn211)(e
21、thp 21sin)sin(%100%100)()()(%21ehhthp(3-30)(书3-23)1210时,%100%4.0时,%4.25%0.1时,0%当8.04.0时%4.25%5.1%控制系统的分析PPT课件系统的单位冲激响应系统的单位冲激响应当输入信号为理想单位脉冲函数时,当输入信号为理想单位脉冲函数时,R(s)R(s)1 1,输出量的拉氏变换与系统的,输出量的拉氏变换与系统的传递函数相同,即传递函数相同,即 11)(TSsC这时相同的输出称为脉冲响应记作这时相同的输出称为脉冲响应记作g(t)g(t),因为,因为)()(1sGLtg,其表达式为其表达式为01)(teTtcTt 控制
22、系统的分析PPT课件调速系统闭环传递函数是典型二阶系统调速系统闭环传递函数是典型二阶系统 KSSTKsGsGsssmrc2)(1)()()()(mnnmmmTKSTKSTSTK21222为了使研究的结果具有普遍意义,可将式表示为如下标准形式为了使研究的结果具有普遍意义,可将式表示为如下标准形式222()()()2nnnY ssX sSmnTK2 mnTKmnT12 KTm21n自然频率(或无阻尼振荡频率)自然频率(或无阻尼振荡频率)阻尼比(相对阻尼系数)阻尼比(相对阻尼系数)控制系统的分析PPT课件二阶系统的标准形式,相应的方块图如图二阶系统的标准形式,相应的方块图如图3-83-8所示所示S(
23、S+2n)n2R(s)C(s)图3-8 标准形式的二阶系统方块图_二阶系统的动态特性,可以用二阶系统的动态特性,可以用和n加以描述加以描述,二阶系统的单位阶跃响应二阶系统的单位阶跃响应阻尼比是实际阻尼系数是实际阻尼系数F F与临界阻尼系数与临界阻尼系数的比值 CF临界阻尼系数,临界阻尼系数,1时,控制系统的分析PPT课件 可以看到不同值下二阶系统单位阶跃响应曲线欠阻尼、临界阻尼和过阻尼的情况。二阶系统单位阶跃响应曲线二阶系统单位阶跃响应曲线控制系统的分析PPT课件 当线性定常系统输入信号为原来输入信号的导数时,这时当线性定常系统输入信号为原来输入信号的导数时,这时系统的输出也为原来输出的导数。
24、系统的输出也为原来输出的导数。在零初始条件下,当线性定常系统输入信号为原来输入信在零初始条件下,当线性定常系统输入信号为原来输入信号对时间的积分时,则系统的输出为原来输出的积分。号对时间的积分时,则系统的输出为原来输出的积分。线性定常系统的重要特性线性定常系统的重要特性 这样只要知道系统对某一种典型信号的响应,对其它典这样只要知道系统对某一种典型信号的响应,对其它典型信号的响应也可推知。这是线性定常系统独具的特性。型信号的响应也可推知。这是线性定常系统独具的特性。高阶系统是可以分解成高阶系统是可以分解成(一阶)和(二阶系统)(一阶)和(二阶系统)的组的组合的。高阶系统的响应是由(一阶)惯性环节和振荡环节合的。高阶系统的响应是由(一阶)惯性环节和振荡环节(二阶系统)的单位阶跃响应构成。(二阶系统)的单位阶跃响应构成。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
