 emb(电控制动)
emb(电控制动)

《emb(电控制动)》由会员分享,可在线阅读,更多相关《emb(电控制动)(11页珍藏版)》请在装配图网上搜索。
1、液压制动的终结一电子机械制动(EMB)技术1EMB研究现状及发展趋势1.1EMB研究现状电控机械制动系统(ElectromechanicalBrakeSystem简称EMB)最早是应用在飞机上的,目前正处于向汽车领域转化的研究发展时期。从20世纪90年代起,一些著名的汽车电子零配件生产厂商,如德国的Bosh(博世)、Siemens(西门子)和ContinentalTeves(大陆天合)等相继开始了对EMB的研究,并作过一些相应的系统仿真和装车试验io。另外Eaton、Allied、Signal、Delphi、VarityLucas、Hayes也参与了EMB的研发竞争之中。而国内在此项目上的研究
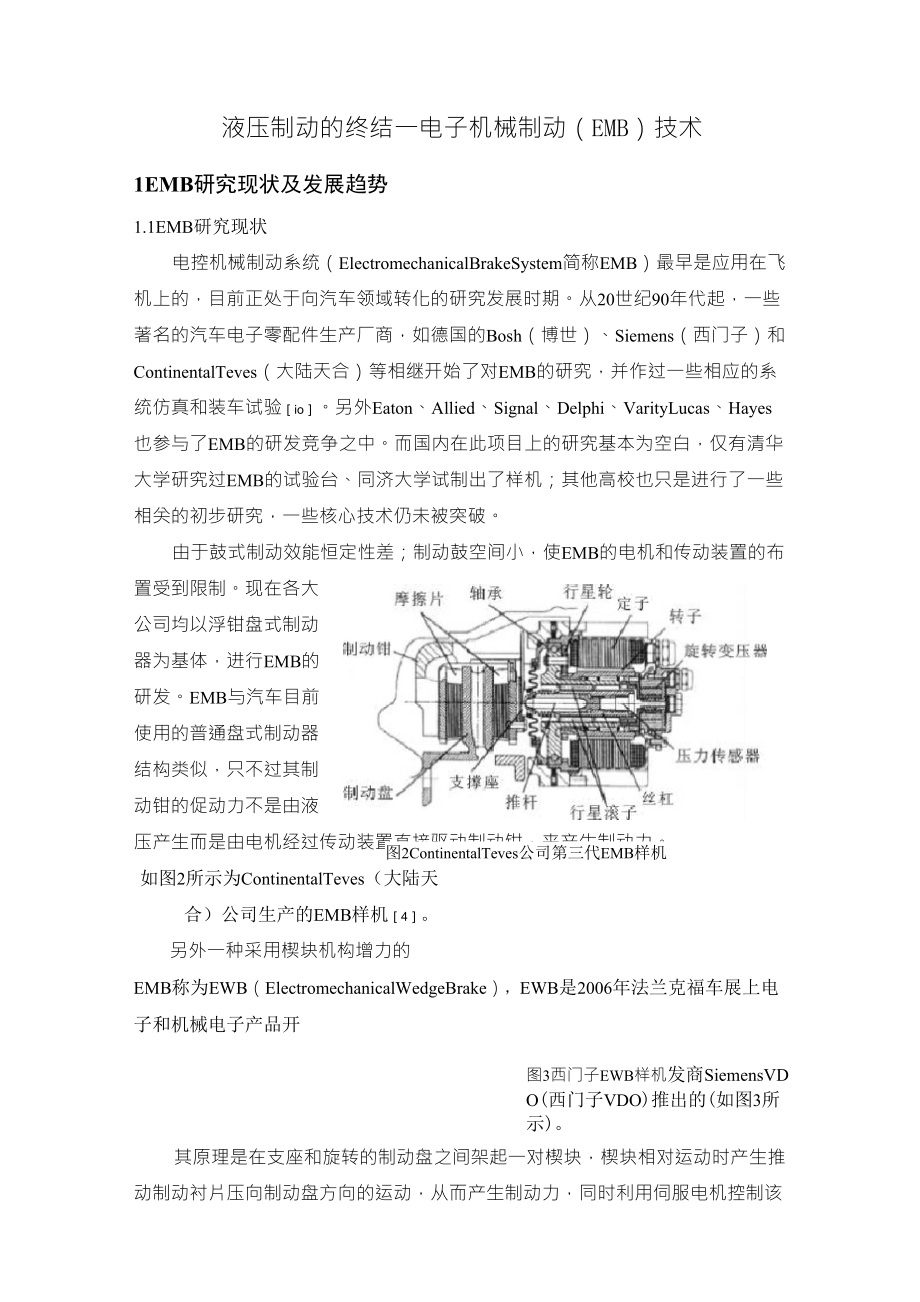
2、基本为空白,仅有清华大学研究过EMB的试验台、同济大学试制出了样机;其他高校也只是进行了一些相关的初步研究,一些核心技术仍未被突破。图2ContinentalTeves公司第三代EMB样机由于鼓式制动效能恒定性差;制动鼓空间小,使EMB的电机和传动装置的布置受到限制。现在各大公司均以浮钳盘式制动器为基体,进行EMB的研发。EMB与汽车目前使用的普通盘式制动器结构类似,只不过其制动钳的促动力不是由液压产生而是由电机经过传动装置直接驱动制动钳,来产生制动力。如图2所示为ContinentalTeves(大陆天合)公司生产的EMB样机4。另外一种采用楔块机构增力的EMB称为EWB(Electrome
3、chanicalWedgeBrake),EWB是2006年法兰克福车展上电子和机械电子产品开图3西门子EWB样机发商SiemensVDO(西门子VDO)推出的(如图3所示)。其原理是在支座和旋转的制动盘之间架起一对楔块,楔块相对运动时产生推动制动衬片压向制动盘方向的运动,从而产生制动力,同时利用伺服电机控制该楔块的运动,使之不至于锁死。在智能控制下,楔块将车辆的动能直接转换为刹车能,由于其自增力作用,EWB比现有的液压刹车更快,因此楔块式EMB电机的功率可大幅度下降。1.2EMB发展趋势目前EMB制动系统的技术还不成熟,离普及还有一段很长的路,需要解决的技术问题还很多,国外把对电控机械制动系统
4、的研究重点集中在以下几个方面8(1) 力矩电机的设计。EMB的一个极大的优势就是制动相应快,所以要求电机必须相应速度快。此外也要求电机功耗小、输出的力矩大。另外在制动过程中,电机将在“堵转”的恶劣环境下工作,因此对电机的可靠性要求高,而且必须机构小巧紧凑、便于安装布置,能在各种恶劣条件下可靠工作。(2) 机械电子执行机构。对于机械电子执行机构的研究已经有几家公司提出了设计方案,目前的执行机构中机械零件还比较多、结构也很复杂。如何有效的传递转矩、增大转矩,如何保证机构能自动调节制动间隙,如何使结构尽量小巧并且可靠都是在设计中要重点考虑的问题。(3) 灵敏度高而又廉价的传感器。现在使用的传感器功能
5、还比较单一,灵敏度也有提高。为了保证EMB系统能正常可靠的工作,需要研发灵敏度高、功能集成、质优价廉的新型传感器。(4) 耐高温电子元器件。对耐高温电子元器件的研究主要涉及到2个方面:一个是在电子元器件本身下功夫,提高其对高温的承受能力和在高温下的工作稳定性;另一个就是改良制动盘的材料和提高其散热能力,通过优化设计提高整个制动器的散热性能,为电子元器件的工作提供良好的环境。(5) 高可靠性的电线和连接件。在新的EMB制动系统中,电线和连接件取代了原来的制动管路等部件,因此要求必须可靠,这将直接影响到整个系统的安全性和可靠性。(6) 可自适应调节的控制算法。目前车辆制动器在控制算法上主要采用3种
6、:滑模控制、逻辑门限值控制和最优控制算法。以后为了适应EMB的发展和特点还可以有新的控制算法。(7) 系统容错控制。电控制动系统的容错型涉及到制动系统的安全性和可靠性,因此是一个至关重要的研究方向。有些学者是用实验的方法去监测和评估EMB对制动请求的响应情况,并通过一定的算法来忽略瞬间的错误信号借以实现系统的容错控制;有的是在分布式的线控制动系统中加入一个中央控制芯片,这是一个专门进行容错控制的冗余设计,并配以专门编写的软件来进行容错控制处理;最新的研究是在系统中引入一个监控器,用以检测可能导致系统错误和失效的信号,然后产生错误检测代码,根据代码来处理失效和提高安全性。车辆电控系统的容错控制是
7、一个涉及到计算机硬件、软件、通信协议等多方面的比较难解决的问题。2EMB的结构原理及研究意义2.1EMB系统的总体结构EMB电控制动系统作为BBW线控制动系统的一种形式,除了有全新的电控制动器,还有其全新的制动系统,如图4所示。EMB电控制动系统有6大基本组成部分:安装在4个车轮的独立的电控制动器;制动踏板模拟器;中心控制单兀;电控制动器的控制器;轮速、车速等各种传感器;电源系统。图4EMB电控制动系统结构简图由图4可见,每个车轮都有一个独立的电控制动器及其控制器。中心控制单元根据踏板模拟器传来的信号识别驾驶员的意图再根据车速、轮速等多种传感器来获得整个车辆的运行状态综合处理各种信息后,发出相
8、应的制动信号给4个控制器,控制器得到信号后将控制4台电机分别对4个车轮独立进行制动。通过传感器再将每个制动器的实际制动力矩等信息反馈给中心控制单元,形成闭环控制,以保证最佳制动效果。电控制动器制动力和制动时间都是由中心控制单元控制的,所以只需把ABS、TCS、ESP等功能的程序写入中心控制单元,而不必多加另外的硬件设备,便可以集中实现各种制动安全控制的功能。这正体现了线控系统模块化、集成化的优越性。2.2EMB的结构及工作原理EMB电控制动器是制动系统的制动执行机构,也是其核心部件,它的性能的好坏直接影响了制动的效果。它一般有四个基本组成部分:电源、电机、运动转换装置和制动钳,如图5所示。在传
9、统形式的EMB中,电机经减速装置减速增扭,再由运动转换装置将旋转运动转换为直线运动,驱动制动钳对制动盘进行制动,电机的运动由EMB控制器控制。对EMB的结构和性能有以下几点要求2:1. 电机要小巧而又能提供足够大的力矩;2. 传动装置能减速增扭,还要将旋转运动转换为直线运动;3. 整个机构要工作迅速,反应灵敏;4. 能自动补偿制动间隙,并能实现驻车制动;5. 有良好的散热性;6. 整个执行器结构紧凑、体积小、质量轻、以便于安装;7. 有足够的强度和寿命,以保证安全可靠。目前国外比较成熟的EMB设计样品有Bosh、Siemens和ContinentalTeves三家公司的试验品,一些研究成果已申
10、请了专利。a.Bosch公司EMB的结构及原理:德国Bosch公司于1996年10月23日在美国专利局申请了第一篇关于EMB的专利,至今共申请了12项相关专利,最近的专利是于2003年03月25日新发布的“ELECTROMAGNETICWHEELBRAKEDEVICE”,图6为此专利中描述的EMB结构简图。IC.25辭涉惮賛17爆母川蝉红潦桂忡!锐,谕20.22时动帽块21划动裁24环图6Bosch公司的电子机械制动器结构简图工作时,动力由电机输入端5输入给内部的两个行星轮系10和12,然后传递给螺纹心轴19,再经螺纹心轴19,螺母17和螺纹滚柱18组成的类似行星齿轮机构转化为螺母17的直线运
11、动。螺母17推动制动钳块22,将制动力施加在制动盘21上。摩擦盘8与行星轮系12的太阳轮15通过一个杯形弹簧16固接在一起,摩擦盘2与行星轮系12的行星齿圈26以同样的方式固接。在两个行星轮系10,12之间有两套电磁离合器7和11。当两个电磁离合器通电时,摩擦盘2和8分别与母体11和7结合,同步运动。不通电时,摩擦盘受制动环限制无法转动。此执行机构有如下4种工作方式:(1) 电磁离合器7通电,11不通电。此时太阳轮6、15结合同步转动,齿圈26在制动盘24的作用下静止,两个太阳轮6、15旋转方向相同,传动比大,可提供迅速克服制动钳块22和制动盘21之间间隙。(2) 两个电磁离合器都通电。此时太
12、阳轮6、15,齿圈1、26都同步转动。由于太阳轮6、15转动半径相同,齿圈1、26转动半径也相同,而行星轮4的转动半径大于行星轮13,因此行星轮架14转动方向仍然与太阳轮15相同,实现了减速增矩的功能。(3) 电磁离合器7不通电,11通电。此时齿圈1、26结合,同步转动,太阳轮15在制动环24的作用下静止,此时行星轮架14和齿圈26的旋转方向相反,在不需电机反转的情况下,即可使制动钳块22和制动盘21分离。此功能可用来调整制动间隙。(4) 两个电磁离合器都不通电。此时太阳轮15,齿圈26在制动环24的作用下都不转动,行星轮架14亦无法转动,因此制动力矩始终施加在制动衬块22上,实现制动力保持,
13、此种工作方式可用于驻车功能。b.Siemens公司EMB的结构及原理3:德国Siemens公司于1997年07月24日在美国专利局申请了第一篇关于EMB的专利开始,到2002年08月13日,先后一共申请了5项相关专利,图7为Siemens公司研制的一种典型的带有机械磨损后,可以自动补偿制动盘和制动钳块间隙的EMB执行机构。如图7,这种执行机构力矩电机内置,转子与螺母相啮合,螺母和心轴固结在一起。当电机工作时,转子转动,使螺母和心轴做轴向运动,就把圆周运动转化为了直线运动。心轴轴向推动增力杠杆和压力盘。杠杆的末端插在制动器缸内的凹槽内,能够绕凹槽转动,在图中采用铰链表示。压力盘再把力传递给传动套
14、筒,套筒和制动活塞之间通过螺纹传动,这个螺纹传动副是不自锁的。制动活塞推动浮动制动钳块,产生制动力矩。橡胶密封环和弹簧的主要作用是制动后使制动活塞等零件回位。当活塞向右移动时,活塞使橡胶环产生弹性变形,产生了作用在制动活塞上的回位力。当制动结束后,在橡胶环的弹性形变力下,传动套筒和制动活塞被推回到制动前的位置上。Siemens公司的EMB还具备间隙自动调整功能。当制动钳块磨损比较严重时,制动活塞的行程超出了橡胶环形变量时,二者发生相对滑动。制动卸载时,橡胶环带动活塞回位。由于活塞和橡胶环发生相对运动,因此活塞返回的行程一定小于制动前走过的行程,于是传动套筒和压力盘之间出现了空隙。传动套筒从制动
15、活塞的内腔中被弹簧推出,直到与压力盘再次接触,退出的行程也就恰好等于磨损掉的厚度。c.ContinentalTeves公司EMB的结构及原理:I制动肚2剌动讎块3ffltf4舞麗心轴5电瞇帙6钳钉丫尊城&齿圈9行眾鬼抿苗牠】1嗽母軸过HI?M轮转子怡定子I了钢殊W催確嵋郵19任盒图8ContinentalTeves公司的电子机械制动器结构简图ContinentalTeves公司于1996年05月29日在美国专利局申请了第一篇关于EMB的专利开始,到最近一次于2003年04月22日发布的最新专利,先后一共申请了12项相关专利,图8为ContinentalTeves公司研制的最新成果一带有两级减速
16、机构的EMB执行机构。ContinentalTeves公司的执行机构也采用了电机内置的结构,它还有一个特点就是模块化,整个机构分为3个独立的模块,分别为驱动部分,一级丝杠螺母减速部分和二级减速齿轮部分,3个模块在生产,安装,维修时可以独立进行,然后组装在一起工作。在驱动模块中包含有一个力矩电机,15、16分别是电机的转子和定子。一级丝杠螺母减速部分由螺旋螺母18,螺旋心轴4和大量的钢珠17组成,这3者构成了一个球螺旋机构。二级减速齿轮由8、9、12、13组成,这是一个行星轮系。当电机转子15转动时,其上的齿轮10带动二级减速齿轮部分的行星轮13转动,同时另一侧的齿轮12与齿圈8相啮合,这样力矩
17、便通过旋转的行星轮架9传递给了一级减速机构中的螺母轴颈11。当螺旋螺母18由二级减速齿轮驱动旋转时,通过球螺旋副螺旋心轴4产生向左的平动,推动压盘19和制动钳块2,与制动盘1接触,产生制动力矩。在驱动部分中还有一个棘轮机构5、6、7,用于实现驻车功能。通过电磁铁5的通断电,可以使棘爪7绕销钉6转动,来控制电机转子15是否旋转。当电机转子15不转动时,可以保持住制动力,达到驻车的目的。d.Siemens公司楔块式EMB(EWB)的结构及原理5小EWB方面,SiemensVDO的技术源自赫尔曼-冯-黑尔姆霍尔茨联合会(DLR)开发的新型的线控制动技术,这是一项具有高自增力能力电控机械制动器(eBr
18、ake)。几位学者RichardRoberts,MartinSchautt、HenryHartmann、BerndGombert、AntonioPascucci、DittmarLange先后于2002年1月、2003年1月2004年1月在SAE(美国汽车工程师学会)发表了题为eBrake-themechatronicwedgebrake(eBrake一楔块式电子机械制动器)、ModellingandValidationoftheMechatronicWedgeBrake(楔块式电子机械制动期模型及其有效性)、TestingtheMechatronicWedgeBrake(测试楔块式电子机械制动
19、器)的文章,详细介绍了EWB的样机结构、基本原理、控制系统以及测试表现,证明了EWB的可行性,此外MartinSchautt、AntonioPascucci、HenryHartmann还于2006年1月17日申请了EWB楔形面参数设计的专利。图9Siemens公司EWB样机剖视结构图女口图9所示,SiemensVDOEWB的主要结构由电机、滚珠丝杠、楔块、滚柱以及驱动机构组成。楔形块由滚珠丝杠驱动。在这个机构中,作用力通过两个相邻楔形表面的挤压传递。这就允许两个电机可以一起工作也可以自由地运动对系统加载。们同时工作的时候,一个滚珠丝杠拉着楔块向拉楔块的方向运动而另一个滚轴丝杠与第一个滚轴丝杠推
20、楔块样在消除制动间隙的过程中减小了单个电机的载荷。而楔块式EMB工作在临界点的时候,两个滚轴丝杠相对地向各自的方向拉楔块。楔块机构由两个表面呈W型的楔块组成。靠近电机的里面的楔块相对于电机是静止的,外面的楔块可以做轴向和沿制动盘方向的运动。这种结构分担了载荷并且使车辆在向任何方向行驶时都有自增力效果。在两楔块之间加有圆柱滚子,以减小制动钳传来的滑动摩擦力。外侧安装制动衬块的楔块,通过一个预紧的弹簧连接在静止的楔块上。外面的楔块通过轴承表面传递轴向驱动力,这就允许楔块可以相对于电机中心线移动。e.以上四种EMB的对比:以上四种EMB均是以钳盘式制动器为基体,考虑到传动精度的要求,都采用了滚珠丝杠
21、副作为将转动变为平动的机构。不同之处主要有:(1) Bosch公司的EMB没有把力矩电机安装在机构内部,采用的是电机外置,而Siemens和ContinentalTeves公司采用的都是电机内置结构,把电机的定子和转子与其他零件接合在一起。这种布置方式能够使结构更紧凑,体积更小巧,但同时也增加了结构的复杂性。(2) Bosch公司研制的EMB内部都含有电磁离合器,但是电磁离合器的作用不尽相同,经历了一个结构由复杂到简单,功能由简单到复杂的过程。Bosch公司以前申请的专利中,只包含一个行星轮系,但为了实现相应的功能,增加了许多附属机构。采用了两个电磁离合器和两个行星轮系后,工作方式变得更加清晰
22、,功能更加多样。(3) Simens公司的EMB采用了增力杠杆结构,如图7所示,增力杠杆的末端插在制动器缸内的凹槽内,能够绕凹槽转动。当心轴轴向移动推动增力杠杆和压力盘时,压力盘是不转动的,由于心轴和压力盘在杠杆两侧的力臂不同,压力盘的力臂短,从图7中看两个力臂之比大约是4:1,这就使压力盘的压力大于心轴产生的轴向推力,起到了增力的作用。另外Simens公司的EMB还具备间隙自动调整功能。这种制动盘和制动垫块的间隙自动补偿方式是其特有的结构,完全是由执行机构本身的机械结构自动实现的。Simens公司的EMB内部还带有环形压电式力传感器和位移传感器用来测量心轴移动的轴向距离,工作性能更为可靠。(
23、4) Siemens公司楔块式EWB应用的是一种全新的制动理念,结构上也与前面三种EMB有较大差异。传统形式的EMB中,由于需要高的制动力和能量输入,制动系统需要较大功率的电动机来提供能量,这样,电机重量大、价格昂贵。采用行星齿轮和增力杠杆机构的EMB结构复杂,重量大,布置不便。而EWB将车辆的动能提供给电控驱动装置,由自增力效应获得的辅助力增加法向制动力。因此制动系统只需要向驱动机构提供很小一部分法向力即可获得高效能的制动。总的来说EWB有如下优点:1平均促动器能量消耗明显降低,主要是由于:所需驱动力明显降低在最理想点降为0;增加卡钳接触面所需的能量并不是由电气系统提供的而是来自车辆的动能;
24、2促动器的尺寸可以大大缩小,这样:制动器所需安装空间减小;安装在底盘上的主要部分的质量可以减小;制动器总成的成本可以降低;3.不需要将供电系统转换为42v;4高的动力学性能、可控性以及稳定性。2.3EMB的研究意义汽车作为一种地面交通工具,行驶、转向、停车是其三个基本功能。而其中停车功能就是由汽车的制动系统来完成的。“安全、节能、环保”是汽车未来发展的三大主题,制动系统作为汽车的一个重要组成部分,直接影响到汽车的安全性。EMB制动系统是以电能作为能量来源,由中心控制模块控制,由电机经过传动装置产生促动动力驱动制动钳,实现制动功能的全新制动系统,与传统制动系统相比,它具有以下优点9:1. EMB
25、制动系统用电线传递能量、数据线传递信号,完全摒弃了原有的液压管路等部件,而且无真空助力器,结构简洁、质量轻、体积小,便于发动机舱其他部件的布置,也有利于减轻整车质量和整车结构的设计与布置。2. EMB采用了电控,易于并入车辆综合控制网络中(CAN总线),并且可以同实现ABS、TCS、ESP、ACC等多种功能,这些电子装备的传感器、控制单元等部件可以与EMB共用,而无需增加其他的附加装置。避免了像传统制动系统那样,在制动系统线路上安装大量的电磁阀和传感器,使得制动系统结构更加复杂,也增加了液压回路泄漏的隐患。3. 在传统的制动系统中,踏板至制动主缸的机械结构以及气压液压系统的固有特性,使得制动反
26、应时间长、动态响应速度慢。制动力由零增长到最大大约需要0.20.9S,而且当需要较小的制动力时,动态相应更慢。而EMB制动系统就不存在这样的问题,EMB以踏板模拟器代替了传统的机械踏板传力装置,中心控制单元接受踏板模拟器传来的电信号,判断驾驶员的意图,产生相应的控制命令,这样便大大缩短了制动反应时间,而且改善了制动时的脚感,无打脚现象。4传动效率高、安全可靠、而且节能。5无需制动液,降低了对环境的污染。总之,现代汽车发展的方向是模块化、集成化、机电一体化,最终实现整个车辆的线控。而EMB正是这已发展方向的体现。虽然目前尚未有比较完善的、量产的产品,但在国内外各个汽车厂商和高校的大力研发之下,E
27、MB必然会在不久的将来代替传统的制动系统,为汽车进一步向前发展打下良好的基础。参考文献1刘刚,宋健.EMB硬件在环仿真试验台J.汽车工程,2004,28(10):929-9322林鹰.现代汽车电制动新技术J.交通与运输,2005(2):453张猛,宋健.电子机械制动系统发展现状J.机械科学与技术,2005,24(2):209-2114林逸,沈沉,王军等.汽车线控制动技术及发展J.2005(12):1-45 HenrryHartmann,MartinSchautt,AntonioPascucci,etceBrake-themechatronicwedgebrakeJSAE2002-01-2528
28、6 RichardRoberts,MartinSchautt,HenryHartmannetcModellingandValidationoftheMechatronicWedgeBrakeJ2003-01-33317 RichardRoberts,BerndGombert,HenryHartmann,etcTestingtheMechatronicWedgeBrakeJ2004-01-27668汪洋,翁建生.车辆电控机械制动系统的研究现状和发展趋势J.商用汽车杂志,2005(11)102-1049刘珺,刘芳明,林慕义.工业车辆线控制动系统J.机械管理开发,2004(5):26-2910熊璐,余卓平,张立军.汽车电制动系统(BBW)现状和前景J.上海汽车,2002(6):1-4
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
