 无功补偿控制系统软件设计方案
无功补偿控制系统软件设计方案

《无功补偿控制系统软件设计方案》由会员分享,可在线阅读,更多相关《无功补偿控制系统软件设计方案(11页珍藏版)》请在装配图网上搜索。
1、无功补偿控制系统软件设计方案泵统软件第构采用模块化设计.各功能模块曲相应的丫程序来完成,使杀统敕件结 构清冊i便于调试押條改。系统軟评主要赳含下列功能摸块:数据采樂模块:(2)键盘操作程序:(3)境糊控制算法欖块; 存储器疔仙于读写程序.用控制霸外围模块卡富,功龍完善,控制规律也比较臭杂,其中競&的计卑处理工 作很多汇娠语吉編译效率高:(IBI算能力不强,较大规模的宜杂思序谕计困雉,且开 瓯周期阻川读性及錐护性都比较蛙I前的亡涪;编译器编译数車很両 叮诙刮最优 汇编程序咱1 )7倍、所以系统軟们翔呈语言采用住语肓C语言是种姑枸化程序 设讣语古,它兼顾了寥种閒级帖才的特点,并具彳汀一编语苕的功能
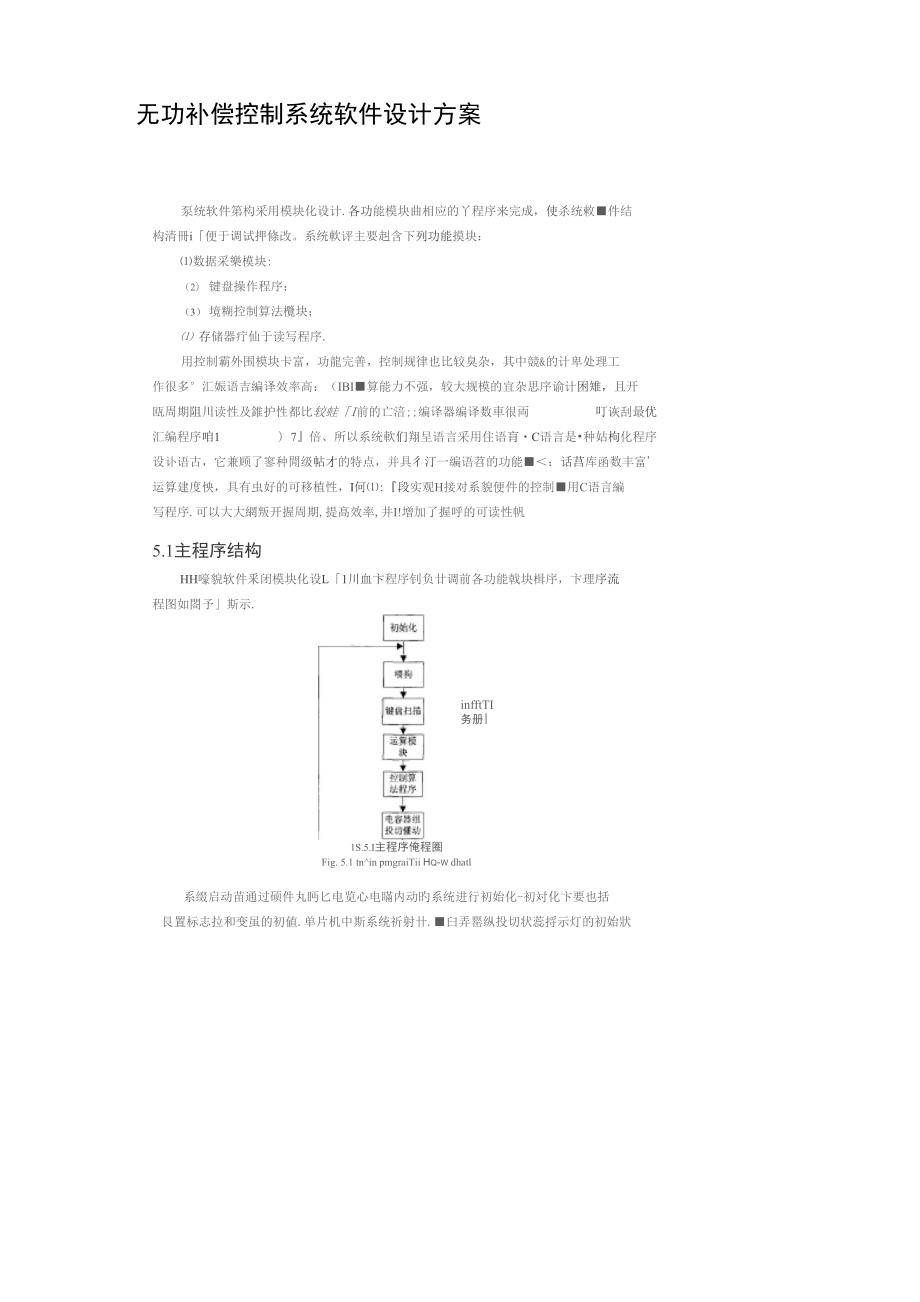
2、:话莒库函数丰富 运算建度怏,具有虫好的可移植性,I何:段实观H接对系貌便件的控制用C语言編 写程序.可以大大網叛开握周期,提髙效率,井I!增加了握呼的可读性帆5.1主程序结构HH嚎貌软件釆闭模块化设L1川血卞程序钊负廿调前各功能戟块楫序,卞理序流程图如閤予斯示.infftTI务册|1S.5.I主程序俺程圈Fig. 5.1 tnin pmgraiTii Hq-w dhatl系缀启动苗通过硕件丸眄匕电览心电瞞内动旳系统进行初始化-初対化卞要也括艮置标志拉和变虽的初値.单片机中斯系统祈射卄.臼弄罂纵投切状蕊捋示灯的初始狀态,5045検块初始化,设胃各接口芯片的初始化等。然后程序进入主循环:首先触发
3、喂 狗程序,为看门狗定时器复位.接着扫描健盘状态,看是否有键盘操作,如右键盘操作 则进入键盘操作显示模式。接着进入运算模块,根据采集的电压信号、电涼信号、相角 倍号计算电网的电压和无功接右程序进入控制算法模块,控制算法模块根站基于模糊 控制算法的投切判据进行比较判断,然坊把比较结果传送给电容器组投切模块,进行相 应的投切动作。5.2各功能模块设计5.2.1数据采集模块设计数据采样是整个控制器系统工作的的提,能否很好的进行采样,釆集到准确的数据, 对于系统的计算和正常运行起若决定性的作用。首先为保证采样时间的准确性,使采集 到的值尽可能的接近电网的实际值,软件采用定时中断的方式来进行釆样处理。利
4、用单 片机的定时器0中断.每hns定时器0中断次.进入定时器中断程序。在定时器中断 中,A、B、C三相循环采集,每次中断中进行一相电压和电潦的采样工作.然后,并 且在采样Z后咒按进行累加运算,最后求岀累加结果的均值.通过六位LED数码管显 示出來。其中显示子程序也杲在中断中完成,显示子程序采用动态扫描方式W 程序的 流程图如图5.2所示。中断服务程序:首光通过控制4051的八路选通通道來采集三相电压电流值。这6 个信号对应405】的04通道,顺序分别为A相电压,A相电流,B相电压,B相电流, C相电压,Clfl电海 对应的4051控制位ABC为000401.第一次进入1ms定时器中 断程序,首
5、先通过串口 A/D釆集A相电压、A相电流信号,并且把采集的数抵累加到 指定崙存器。第二次进入1ms定时器中断程序时,通过串口 AQ采集B相电压、B相 电流信号,并且把采集的数据累加到抬定寄存器.第三次进入1ms定时器中断程序时, 通过.$U A/D采集C相电压、C相电涼信号.并且把采集的数携累加到指定寄存器. 当累加计数到定数值时进行求均值计糞得出三相电压,电流值。接若再通过LED显 示模块把得出的结果显示出来。系统默认的是显示三相平均电压值,如果想看三相分别 的电压值或者电流值需要进行键盘操作。为保证得出的平均值是在同一个周期内采样的结果。因此采样时累加的次数就必须 要覆孟整个采样周期 N
6、= %。其中Tg娃市电的电压周期.7 = %oO2 7采=呢,池002%加20因此,本系统设定每采集100次信号,即采集5个周期的电网信号,做一个均值运 算,认定为此时的电压值。ft 5.2采集程序流程图Fig. 5.2 Acquisition process flow chart5.2.2键盘操作模块本系统的键盘操作模块设计的比絞复杂考便到控制的方便、简单性以及线略板的 布局布线等方面的原因,只设计了四位按钮式键盘来完成A、B、C三相电压值,电 网即时运行电圧值,电网即时运行电流值的查看以及投切电容器组的阀值、模期控制算 法中电压系数.投切间隔等预设数的修改设置等一系列的工作以上锭盘模块的功
7、能都 是在系统的软件中实现的。轶件的流程图如图5.3所示.在设计键盘操作的软件时,主要由控制器的功能上的两方面入手:1可以显示A、 B. C三相电压值.电网即时运行电压值和电网即时运行电流值2电容器组投切阀值, 投切时间间隔,模糊算法中的电压权系数等预设数的修改设置。因此,任编写软件时从 時条线入手.即,按F “功能6T就是要修改徴设数的掾作.按下键就是査看电 网即时电压值的操作。LED数码管通常能示的是龟网即时的平均电压值,每按一下” 德漩胡一页.纽示下一页所呈现的电压值。依次为:A相电压值、8相电压值、C相电压值、电网运行即时电流值。修改预设数的操作是:每按下一次功能键”即显示一位 预设数
8、的设定值,依次为:投电容阀值、切电容阀值.模榊算法中电压权系数、投切时 间预设数。再进入预设数操作时,按化广健为当前预设数的修改移位操作,磚按一狀 光标移动一位,修改当时位上的数值。按键为当时位置的加一操作,也就是光标 所在位的加一操作.这样设计虽然操作时有些麻烦,但是在礫作次数少设计按键不需耍5.2.3控制算法模块控制舜法模块是控制箕法的具休体现,是单片机控制电容器纽投切的关键步球。木 模块完全按照第三章中本系统设计的基于模稲算法的控制策略来完成把采集到的电尿 值和无功功率模糊化处理,然后通过推理规则对采集到的数据进行分析,然后判断各数 据的具体情况.仗后通过对电压和无功功率的加权处理,得出
9、最后的输出值。输出值与 设定的投切电容的阀值进行比絞,得到最后的投切命令给输出模块.控制算法中设置了 电压的上下极限,当采集岀的电压值超过上、下极限时多数为网络故障或者供电系统出 现事故因此这时装迓立刻发岀跳闸信号。若输出值大丁切电容阀值时,逐级切除电容 器,以降低电压,且毎切除-级的同时不断地脸测电压值和无功值。若得出的输出值恢 复到正常值,说明这时电压.无功已经稳定,则不再切除电容器,若仍离于阀值.则继 续逐级切除,若电容藩已全部切完而输出值仍高于阀值,则返回主程序,继续檢测电网 电压,等待电网电压恢复到正常范is内.若输出值在投电容阀值之下,逐级投入电容器, 以升高电压,且每投入一组的同
10、时不断地检测电压值和无功值.片得出的输岀值恢复到 正需值.说明这时电压、无功已经稳定,則不再投入电客器.若仍低于阀值,则继续逐 级投入.若电容器已全部投完而输出值低于阀值,則返回主程序,继续检测电网电压, 等待电网电压恢复到正常范围内。Fig. 5.4 Fuzzy control algonthm flow chart为防止瞬対干扰和投切跟荡,电容器的投切和挑闸信号的发出并不以当时单片机计 算出的结果立即动作.而是累计若干组之后,逬行比较运算,把这若F组信号嘟与第-5.2.4存储器模块设计5.2.4.1 X5045存储器相关资料本控制器系统要求对投入电容器、切除电容器阀值,电流极限值,电容器投
11、切时何 间隔,模槻控制算法中电压权系数等用户可以通过犍盘修改的数值进行保存这样,就 需要把这些数据保存到存储器中。以便任下次垂启时单片机可以宜接调用这些修改后的 数据。本系统的存储器采用帝有看门狗功能的串行EEPROM的X5O45芯片.可擦写周 期1000000次,并且保存时间达到100年.X5O45的控制指令被组织成一个8bit字节, 这些命令中有两条只耍丘接将指令代码写入芯片即可,有两条读指令用干初始化输出数 据,其它的捋令,还需要一个8位的地址以及相关的数据。首先定义各命令控制字见表 51。他们都是通过ISP串行总线来写入器件的,所有抽令、地址、数据都是MSB先写.表5.1X5045指令
12、格式及其按作 Table 5.1 X5O45 command and its operation format指令名称播令格式完成的操作WREN00000110写允许WRD100000100WMitRSDR00000101读状态寄存器WRSR0000 0001弓状态奇存器:看门狗和块檢定READ(XXX)Aj011从选定的开始地址单元中读数据WRITE0000 a4oh向选定的开始地址单元写入数搖JC5045的状态寄存器由4个非断电不会丢失的控制位和2个断电即消失的状态位药 成,控制位用于设賈看门狗定时器的溢岀时何和存储器块保护区。状态寄存器的格式见 表5.2 5.2X5045状态斉存器洛式
13、Table 5.2 X5O45 Status Register formal765432 1000WD1WD0BL1BL0WELWIPWIP是一个易失性的只读位,在片内编程时,它指示出器件“忙3这一位可以用 RDSR指令读出,当读出的这一位是 T,则表示内部正在进行写葆作.如果是“0”, 表示内部没有逬行写操作.WEL是一个易失性位.当该位为时表示芯片处于写允许状态,而该位绘“OS 則代表该片处于写禁止状态,WEL也是一个只读位,指令WREN将使WEL变为“1寫 而指令WRDS则俗这位变为“0”。块锁定为BL0和BL1用于设置块保护的层次,这个非易失性的位通过WRSR折令 来编程,通过这两位的
14、设賢,町以使存储器的1/4、1/2、全部都处于写保护状态,当然 也可以全部都不处于写保护状态,具体的设宙看表5.4看门狗定时器控制位:WDO和WD1.用于选择看门狗的定时溢出时间.具体的情 况看表5.3,这两个非易失位通过WRSR指令逬行编程均。衣5.3 X5045看门豹定时器控制対间Table 5.3 Dog timer control time acting as doorkeeper of X5O45状态寄存器位看门狗定时器溢111时间WD1WD0X5O45001.4S01600ms10200ms1I禁止表5.4X5CM5块保护控制 iablc 5.4 Protection contro
15、l Nock of X5(M5状态寄存器位保沪的地址空间BLIBL0X504500不保护015I80H-S1FFH10$100H-$1FFH11$0001卜S1FFH5.2.4.2单片机对X5O45的编程步曝首先对写使能锁存器置位.然后发送写操作指令,紧接着由CLK信号蝕发发送 EEPROM的地址和需写入的数据,在输入数据之后将置高,一般经2ms的延时,则数 丸被写入EEPROM中:也可以通过检测状态寄存器的WIP位来判断写操作是否完成, 若W1P位为离,表示写操作正在进行,需继续检测,一玄到W1P位变低为止.这时对 X5045的编程工作即告完成。本存储器模块中是山几部分穆序组成,其中包括:写
16、允许 子程序、写禁止子程序、写一个字节子程序、读一个字节子程序.读状态寄心器子程序、 写状态寄存器子程序、写存储器子程序、读存储器子程序等,(1)写存储器子棉序要往存储器里写数据。首先要通过WREN指令賈WEI位为411 w.先将CS拉低, 将WREN指令送入器件,然后将CS拉高.再次将CS拉低.随后写入WRITE指令并 嫁随8位的地址,可以连续写入16个字节的数据 WRITE指令的位3用于选择存储器 的上半区和下半区。如果CS没有在WREN和WRITE指令之间变为高电平,则WRITE 指令被忽略.流程图如图5.5。写操作至少需耍24个时钟周期,CS必须拉低井在操作期何保持低电平,主控机可 以
17、连续写入16个字节的数据,但是这16个字节必须写入同-页.一页的地址开始J:地址(XXXXXOOOO)结束于地址【XXXXX1111】。如果待写入的字节地址已到达一页 的最后,而时禅还继续存在.由计数器将回绕到该页的第一个地址并覆盖前面所写的内 容(2)读存储器子程序要读存储器的内容,首先将CS拉低选中该器件,然后将8位的读指令送到器件中 去.跟着送8位的地址,读抬令的位3用于选择存储器的上半区或下半区,在读操作码 和地址发送完毕后所选中的地址单元的数据通过SDO线送出.在读克这一字节后,如 果维续提供时钟脉冲,则这地址单元的F个单元的数据将会被额序读出,地址将会 自动地增加。当到达最髙地址之
18、厉,地址将会回绕到YOOOH单元,读周期在CS变为髙电平后中止。程序流程图如图5.6。Fig. 5.5 Flow chart of write memory of X5045图5.6X5045 it存储器框图Fig. 5.6 Reading memory diagram of X5O455.3软件抗干扰设计53.1指令冗余技术(1) NOP的使用在双字节指令和3字节指令之后插入两个单字节NOP描令,可保证其后的指令不 彼拆因为“乱飞的程序即使落在操作数上,由于两个空操作数捋令NQP的存在, 不会将其后的指令肖操作数执行,从而使程序纳入正轨.C-51语言程序中,NOP指 令由op_函数产生【切.
19、对程序流向起决定作用的指令和某些对系统工作状态起重要作用的指令之前插入 两条NOP指令,可保证乱飞程序迅速纳入轨道,确保这些指令正确执行。(2)重娶指令冗余程序指令在执行过程中或者保持(锁存之垢,都河可能被噪丙修改而导致控制失 效乃至引发爭故为此,对干程序流向起决定作用的指令和某些对系统工作状誉起垂要 作用的捋令.在它们的后面重复写上这些指令,以确保这些指令的正确快行。5.3.2数字滤波对计算机捋制系统中的常态干扰.可以用数字渡波的方法加以抑制或者滤除W所 谓数字滤波,就是通过i定的软件程序降低扰在有用信号中的比垂,故实质上是一种 程序滤波。数字滤波是用软件实现的,不需増加换件.故可隸性岛,且
20、无阻抗匹配问题。 在系统的软件设计中,对电压、电流均值的求取就采用了防脉冲干扰平均值数字滤波法。 该方法是先去掉N个数据中的最大債和最小值,嬪后计算N2个数据的算术平均值.这 种方法适合干脉冲干扰比较严重的场合.在这种场合若采用-般的平均值法,则干扰将 会“平均”到结果中去,故平均值法不易消除由于脉冲干扰而引起的谋差a】。5.3.3按键去抖从镀按下到接触稳定要经过数奄杪的抖动,键松开时也存在同样的问題.这会引起 一次按健多次读书问题,为保证健识别的准确,需要进行去抖处理。程序设计中采用软 件延时10ms的方法躲过抖动,即当枪査出某键闭合(或断开)后,执行一个10ms延 时子程序.让抖动消失后,
21、再检验一下键的状态.这样可以避免因按键抖而造成的巫复 读键何題5.3.4软件陷阱技术在程序中设计软件陷阱,引导程序进入指定的指令操作并最终回到程序的入口处, 使系统复位.避免密个系统瘫痪。此外,可在未使用的中断向量区存放系统初始化的入 口指令.假如系统受到干扰,俏谋的产生这些中断.系统即被車新复位。当单片机应用系统工作正常时,单片机的CPI;不会执行软件陷阱程序段;但是,当 单片机应用系统受到干扰而程序跑飞后,由于程用计数器pc值错谋,玻坏的指 令格式导致执行非正常抬令,从而执行软件陷阱程序段,落入软件陷阱,将跑飞的程 序引导到复位入口地址OOOOH。软件陷阱程序段中的连续2条NOP指令是为了
22、増强 “UMPOOOOH”披捕嵌的能力.即UMPOOOOH不会被冲散,当程序跑E后会得到 完整地执行,从而使览E的程序纳入正常轨道,软件看门狗技术就是软件陷阱的一个应 用实例。在51单片机中,系统初始化时将MCU内部的定时器/计数器TO设置为定时 器,并将TO定时溢出中断设置为髙级中断,利用程序使TO定时约为130ms来形成软 件看门狗。针对选矿厂供电线路过长,线路阻抗过人,现有的供电线路远远超出了 10KV输电 线路的经济供电半径。造成该厂的两台大功率球磨机试车无法起动,需娈稳定末端电压, 减少线路耗损,需要无功补偿这一何题.本文通过对电网无功补偿原理的分析,以及目 前无功补偿装置的发展情况
23、的了解.设计了在高压母线上分相检测婪中补偿的智能无功 补偿系统。针对该厂内功率设备过多,频繁启动的实际倩况,提出了基于模柵控制的智 能控制方法,并证实了这种控制方法较传统的九区图控制方法有右很高的可行性与优越 性.在谡件设计中,主要完成了数据釆集模块、控制输岀模块、显示模块、电源模块. 蝕发电路模块、看门狗模块以及AD转换模块的设计.在软件方面,采用高级语言中的 C语言对单片机进行编程,取得了便好的效果。目前.该无功补偿数字控制系统运用干 仍春选矿厂无功补偿,经过实际运行.取得了期显有效的成果。義6为球磨机装载不 同垂址铁球时.无功补偿系统投切电容的组数。6.1袈场ifl试结乗 Table 6
24、Fiild lesiing resuhs245KW球彷机 投入吨数380KW球廉机 投入蔥数电容器组投入 组数245KW球於机投入吨数38OKW球磨机投入吨馥电容器爼投入 组数0停010525停11082811010210停112153停0115183停21152044115224由现场实际情况可以看出.在球底机低负载的惜况下,无功补偿系统只投了一组电 容既满足了电机Q动的要求。在两台人型球磨机满负我运行的情况下才投入4组电容器, 冇两组余昼,说明无功补偿系统符合设计耍求.可以保证该厂的正當投产.6.2展望与不足由于作者理论水平以及实际经酚的不足,在整套补偿装買的设计中还田有很多需要 过一步提奇和完善的地方,下面可以逬一步开展的工作有:(1現场曲測数躬的将确度有待丁逬一步确认和提高,经验参数也有待于进一步強 证.以炎高模糊控制系统的精度。(2)拎制器功能的进一步扩展.例如:冃尸可根据使用习惯.在电容器蛆的投切策 弗上可必竭择葺它更合适的方宪井枚i ;糊关程序;控制器留打廂关接I二可加强实时监控 以及通诉功能: 斷着相关技术的发展.有关控制芯片的忻钱也拥应的释低叮以毛虑应用内部 奉战高位曲D、看门狗的单片机比应D$卩等控制思片來简优控制器,
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
