 6SPS与6PSS并联机构的运动与受力分析
6SPS与6PSS并联机构的运动与受力分析

《6SPS与6PSS并联机构的运动与受力分析》由会员分享,可在线阅读,更多相关《6SPS与6PSS并联机构的运动与受力分析(12页珍藏版)》请在装配图网上搜索。
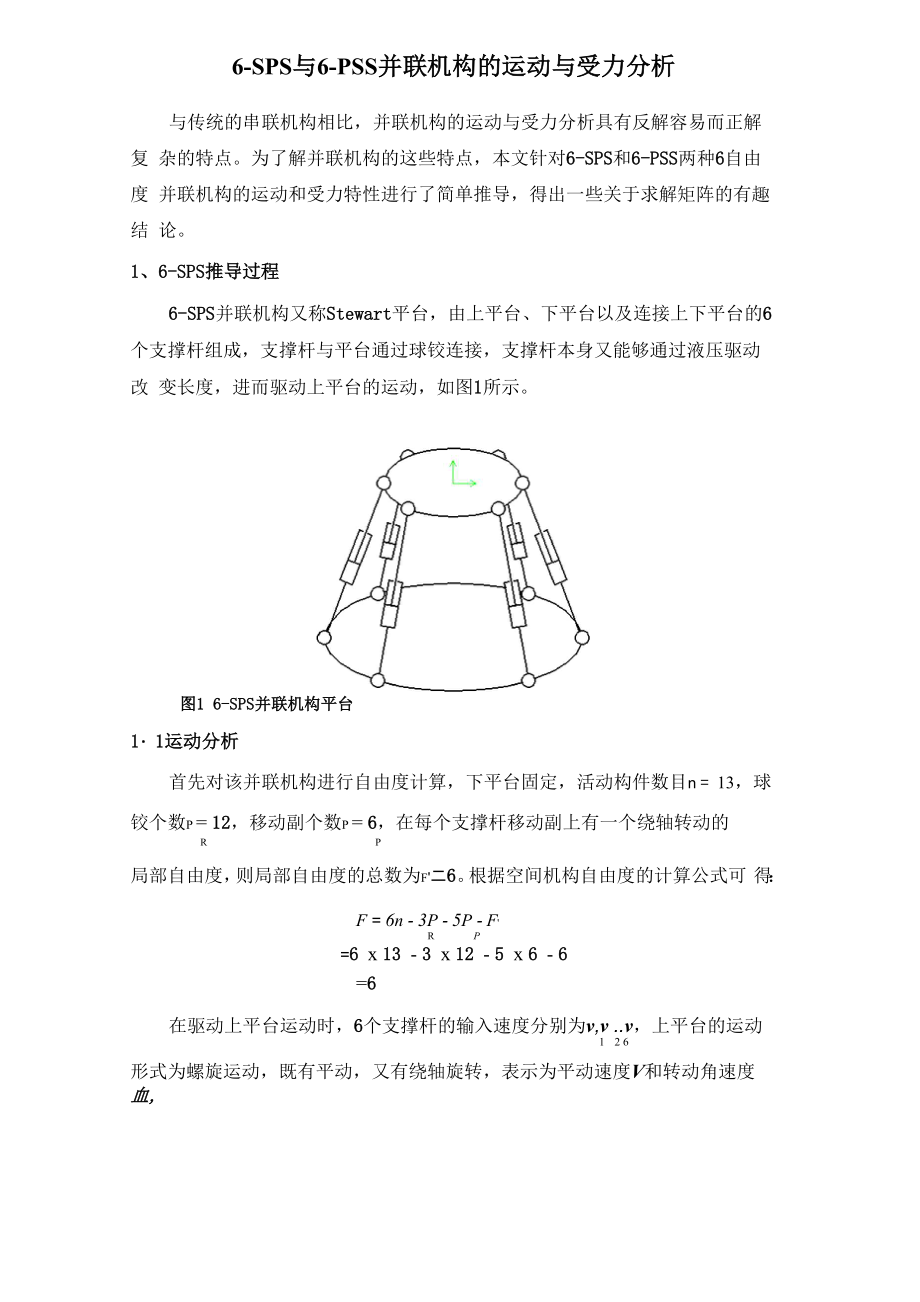
1、6-SPS与6-PSS并联机构的运动与受力分析与传统的串联机构相比,并联机构的运动与受力分析具有反解容易而正解复 杂的特点。为了解并联机构的这些特点,本文针对6-SPS和6-PSS两种6自由度 并联机构的运动和受力特性进行了简单推导,得出一些关于求解矩阵的有趣结 论。1、6-SPS推导过程6-SPS并联机构又称Stewart平台,由上平台、下平台以及连接上下平台的6 个支撑杆组成,支撑杆与平台通过球铰连接,支撑杆本身又能够通过液压驱动改 变长度,进而驱动上平台的运动,如图1所示。图1 6-SPS并联机构平台11运动分析首先对该并联机构进行自由度计算,下平台固定,活动构件数目n = 13,球 铰
2、个数P = 12,移动副个数P = 6,在每个支撑杆移动副上有一个绕轴转动的RP局部自由度,则局部自由度的总数为F二6。根据空间机构自由度的计算公式可 得:F = 6n - 3P - 5P - FRP=6 x 13 - 3 x 12 - 5 x 6 - 6=6在驱动上平台运动时,6个支撑杆的输入速度分别为v,v .v,上平台的运动1 2 6形式为螺旋运动,既有平动,又有绕轴旋转,表示为平动速度V和转动角速度血,输入速度和平台速度之间有什么运算关系呢?图2 6-SPS并联机构速度分析如图2所示,取上平台的转动中心为O ,支撑杆1与上平台的铰接处取为A,中心O到铰接点A的向径为R,则上平台位于A点
3、处的速度可表示为:1设支撑杆1的方向向量为l,V向支撑杆1投影可得:1 AV -1 = (v + a x R ) -1A 111=v -1 + (a x R ) -111 1=v -1 + a - (R x l)11 1支撑杆1的输入速度V沿杆长方向,则V向支撑杆1的投影即为v,从而可得: 1A1v = V -1 = V -1 + a - (R x l )1 A 1111同理可求得其余支撑杆的速度表达式分别为:v = v -1 = v -1 + a - (R x l )2 A 222 2v 二 v -1 = V -1 + a - (R x l )3 A 333 3v 二 v -1 = v -1
4、 + a - (R x l )6 A 6666将6个输入速度表达式整理写为矩阵形式,可得:即:(I , R x I )1 1 1I , R x l2 2 2l , R x l=333l , R x l444l , R x l5 55l , R x l6 66(V )(l , R x l )11 1 1Vl , R x l22 2 2Vl , R x l3=333Vl , R x l4444Vl , R x l55551 J.l , R x l 丿6y 66 6(l , R x l )-1r v)1 1 11l , R x lV2 2 22l , R x lV3333l , R x lV4444
5、l , R x lV5555J , R x l /I 丿666, 6则上式可简写为:=J -11v3V4式即为6-SPS并联机构支撑杆输入速度与上平台输出速度的计算关系式。1.2受力分析设支撑杆1的驱动力为F,对上平台产生的的驱动力矩为:M = R x F图3 6-SPS并联机构速度分析如图3所示,相应地,支撑杆26的驱动力和驱动力矩分别为F ,M ),F ,M )F ,M ),F ,M )F ,M ),设上平台的负载力和负载力矩为 2233445566F, M ),根据力螺旋理论可写出以下平衡式:(F )(F ) F )(f ) F ) F )“F 1+2+3+4+5+6+lM丿l M丿 2
6、Zl M丿l M丿 4ylM 5丿lM 6丿lM丿二 O即:(F)1IR x F 丿 1 16IR6 F6 丿提出各驱动力的数值大小,可得:(l)、221R x l 丿、2 2y(l )、331R x l 丿、3 3Zf 111R x l 丿、1 1丿写成矩阵的形式,可得负载力螺旋的计算式:(l, l, l, l, l, l=123456,R x l , R x l , R x l , R x l , R 112233445x l , R x l .566y进一步简写为:、式(2)为6-SPS并联机构支撑杆输入驱动力与上平台负载力和力矩的计算关系式。比较式(1)和式(2),可以发现两者具有相同
7、的计算形式,即系数矩阵分别为矩阵J的逆矩阵和转置矩阵,这说明了 6-SPS并联机构平台的速度解算和力与 i力矩解算具有一定的联系,这一结论可以为其他形式的6自由度并联机构解算起到参考作用。2、6-PSS推导过程6-PSS并联机构是对St ewart平台的一种变形,将支撑杆中的移动副放到下 端与下平台的连接处,移动副与杆通过球铰连接,即形成杆长不变的PSS支撑结 构,通过改变移动副的位置来驱动上平台实现不同的姿态,如下图所示。图4 6-PSS并联机构平台2.1运动分析首先进行自由度计算,作为下平台的6个滑块可沿导轨移动,形成移动副。 活动构件数目n二13,球铰个数P = 12,移动副个数P =
8、6。每个支撑杆与滑块RP的铰接处,支撑杆相对滑块有一个绕杆轴线转动的局部自由度,故局部自由度总 数为F二6。根据空间机构自由度的计算公式可得:F = 6n - 3P - 5P - FRP=6 x 13 - 3 x 12 - 5 x 6 - 6=6该机构有6个自由度,因此每个滑块都要进行驱动,才能保证机构有确定的 运动。6个滑块的输入速度分别为vV .v,上平台的运动形式为螺旋运动,既有1 2 6平动,又有绕轴旋转,表示为平动速度V和转动角速度血,输入速度和平台速度 之间的运算关系推导如下。图5 6-PSS并联机构速度分析如图5所示,上平台与支撑杆1铰接处A点的速度可表示为:设支撑杆1的方向向量
9、为l,滑块1运动的方向向量为e。根据支撑杆1长度不 1 1变的特点可知,球铰A处速度v和滑块1的速度v在杆1上的投影相等,即:A1vl = vIA 111将式(3)代入上式,可得:(v + m x R ) -1 = v -11 1 1 1整理可得:v -1 m - (R x l )v =4 +11-1 e -1 e -11 1 1 1同理可求得其余滑块输入速度的表达式如下:v -1m - (R x l )V =4 +232 e -1 e -12 2 2 2v -1m - (R x 1 )V =4 +333 e -1 e -13333v -1 m - (R x 1 )V =6 +666 e -1
10、 e -16 6 6 6将6个输入速度表达式整理写为矩阵形式,可得:V3V4V5V6丿(1 R x 1 )i,i e -1e -1i i i i1 R x 1222 e -1,e -12 2 221R x 13,33e -1e -13 3331Rx 14 ,44 e-1e-14 4441Rx 15 ,55e-1e-15 5551Rx 16,66.e -1 e -1 丿V 6 6 6 6 7即: 1Rx 11,11e -1e-11 1111Rx 122、-122221 R x 13,33e -1 e -13 3331Rx 14,44e -1e-14 4441Rx 15,55e-1e-15 555
11、1 R x 16,66 e -1 e -16 6 6 6V3V4V5IV62(Ie “1 112e -12 213e -13 314e -14 415e -15 51I e -1 6 6R x 1 )i1e -11 1R x 12 2e -12 2R x 133e -13 3R x 144-e -14 4R x 155e -15 5R x 166-e -1 )6 6 7,则上式可简写为:V6丿式(4)即为6-PSS并联机构驱动滑块输入速度与上平台输出速度的计算关系式。2.2受力分析图6 6-PSS并联机构受力分析设滑块1的驱动力为F,支撑杆1为二力杆,对上平台球铰A处的作用力 1为F 。为推导
12、出F与F 的关系,隔离球铰B进行分析。A11 A1图7球铰B受力分析如图7所示,球较B平衡时,可得到下列关系:FA1 ei = f可解出F的数值大小为:A11 1支撑力F对上平台产生转矩M = R xF,同理可得其余各杆支撑力与A1A11 A1力矩。由力螺旋理论可写出以下平衡式:(f )(f )(f )A1+A2+A3 M、Al 7 M丿、4 O Zm丿(F、+ A4IM丿 A 4,(f )(f )(F A5+A6+m丿、4 Cm丿 M丿+二 O(f)(f)A1+A2R x F 丿R x F 丿、CAC/即:1A12 A2(F)+A3IR x F 丿A(F、+A4IR x F 丿4 A4 丿(
13、F)(F +A6+R x F 丿 6A6y M丿(F)A5IR x F 丿A二 O(l 5A5 (R提出各支撑杆力的数值大小,可得:(l 1Al (R、1(l 6A6 (Rx l丿66y(lf 2A2 (R x lV 2 2 F、 M丿A31 R x lV 33x l丿44y代入式(5)表示的各支撑杆力,可得由滑块驱动力表示的平衡式:(l1-1 . R x l 丿1、1 171e -1 1、 1(l6-1 R x l 丿6 6 6y+ 2 2e -1 R x l2 2、2 2 (F +3e -33(l3-1 R x l 丿3 33写成矩阵的形式,可得负载力螺旋的计算式:l6 - e l6 6(
14、l l l l l1 , 2 , 3 , 4 , 5e le l e l e le l1122334455X l66e l .6 6 7R x lRx l Rx lRx lR x l R1 ,I e上式可进一步简写为:(6)式(6)为6-PSS并联机构各滑块输入驱动力与上平台负载力和力矩的计算关系式。对比式(4)与式(6)可以发现与式和式(2)相同的计算规律,即上平台输出速 度与滑块输入速度以矩阵J的逆矩阵为计算系数,上平台负载力和力矩与滑输2入力则以矩阵J的转置为计算系数。23小结将以上计算得出的4个解算公式分别罗列出来如下 6-SPS并联机构:C, m)r = J -1 (v , v , v , v , v , v )T1 123456(F,M)t 二Jt1 1234566-PSS并联机构:(v,血二 J -1 (v , v , v , v , v , v )t2 123456(6)(F, M )t 二 Jt2 123456可以看出,6-SPS和6-PSS并联机构在速度解算和受力解算上具有相同的运 算规律,可以设想,其他6自由度并联机构在进行相应解算时一定也会有相同的 规律可循。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
