 基于PLC的液压机械手的控制系统
基于PLC的液压机械手的控制系统

《基于PLC的液压机械手的控制系统》由会员分享,可在线阅读,更多相关《基于PLC的液压机械手的控制系统(4页珍藏版)》请在装配图网上搜索。
1、基于 PLC 的液压机械手的控制系统付?愚?(湘潭职业技术学院,湖南 湘潭 411102)?摘?要:以数控机床的上下料机械手为研究对象,采用可编程控制器(PLC)对其液压驱动装置进行顺序控制,实现了系统的智能化和柔性化.文中对系统的工作原理及机械本体、液压驱动和 PLC 控制方案等方面进行了较为详尽的论述.关键词:机械手;PLC;液压系统中图分类号:TH138?文献标识码:A?文章编号:1671-119X(2005)02-0053-03?数控加工中心的出现在减轻工人劳动强度的同时,大大提高了劳动生产率.但数控加工中常见的上下料工序,通常仍采用人工操作或传统继电器控制的半自动化装置,前者费时费工
2、、效率低,后者因设计复杂,需较多继电器,接线繁杂,同时电气控制部分易受车体振动干扰,而存在可靠性差、故障多、维修困难等问题.为解决以上问题,我们研究开发了一套采用可编程序控制器 PLC 控制的上下料机械手控制系统.该系统动作简便、线路设计合理、具有较强的抗干扰能力,保证了系统运行的可靠性,降低了维修率,提高了工作效率.1?系统工作原理本系统的上下料机械手(如图 1 所示)采用关节式整体结构,具有结构紧凑、运动平稳的特点,可以方便地实现无级调速.该装置抓取工件重量可达40 kg 50 kg,工作范围最大为横向 1.2 m,纵向0.8 m,这些参数可根据实际需要进行调节.该系统主要是按照控制要求和
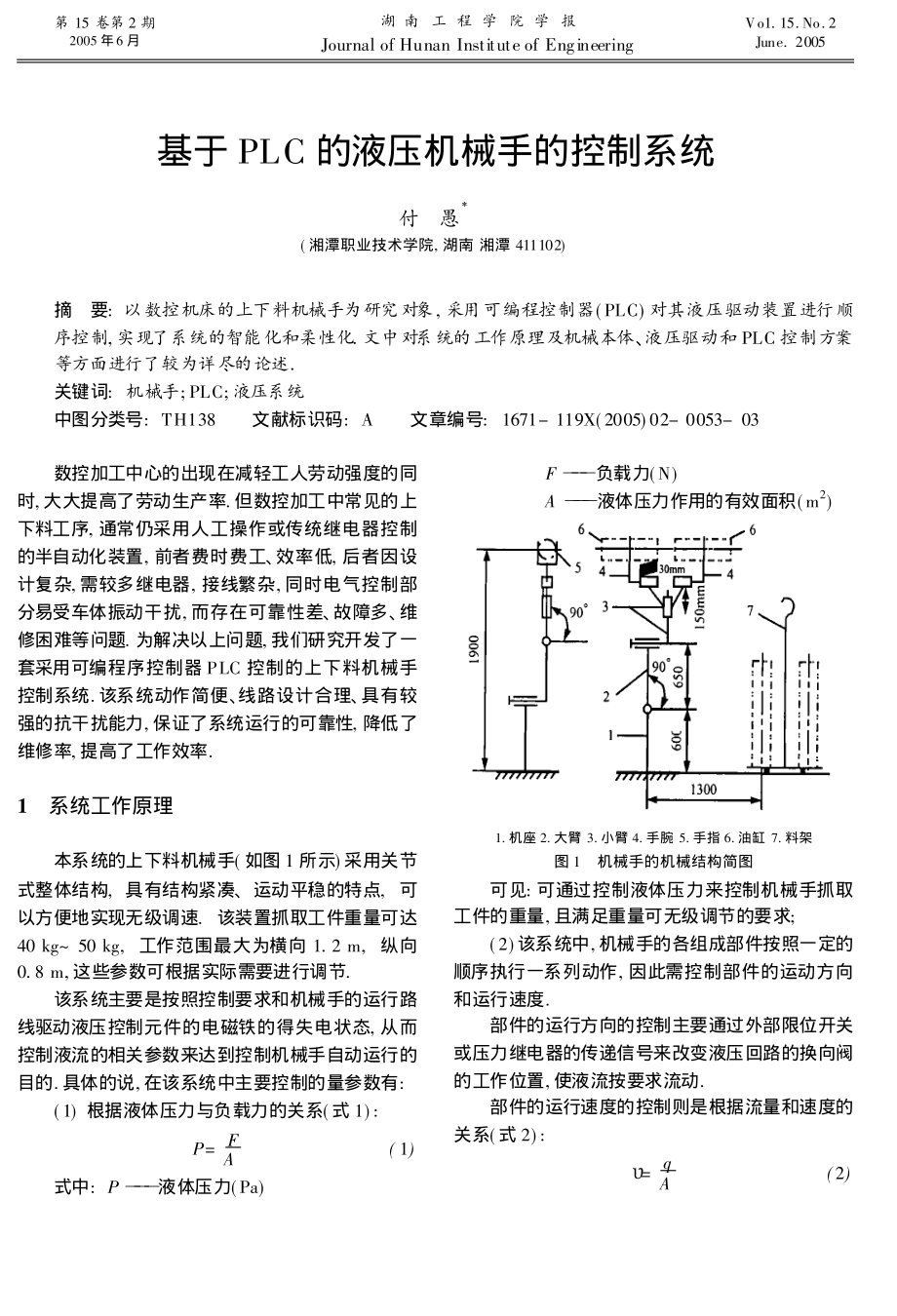
3、机械手的运行路线驱动液压控制元件的电磁铁的得失电状态,从而控制液流的相关参数来达到控制机械手自动运行的目的.具体的说,在该系统中主要控制的量参数有:(1)根据液体压力与负载力的关系(式 1):P=FA(1)式中:P?液体压力(Pa)?F?负载力(N)?A?液体压力作用的有效面积(m2)1.机座 2.大臂 3.小臂 4.手腕 5.手指 6.油缸 7.料架图 1?机械手的机械结构简图可见:可通过控制液体压力来控制机械手抓取工件的重量,且满足重量可无级调节的要求;(2)该系统中,机械手的各组成部件按照一定的顺序执行一系列动作,因此需控制部件的运动方向和运行速度.部件的运行方向的控制主要通过外部限位开
4、关或压力继电器的传递信号来改变液压回路的换向阀的工作位置,使液流按要求流动.部件的运行速度的控制则是根据流量和速度的关系(式 2):?=qA(2)第 15 卷第 2 期2005 年6 月?湖 南 工 程 学 院 学 报Journal of Hunan Institute of Engineering?Vo1.15.No.2June.2005式中:?部件运行速度(m/s)?q?液体的流量(m3/s)?A?液体压力作用的有效面积(m2)可见:可以通过控制液压系统的流量来控制运动部件的运行速度,且满足速度可无级调节的要求.系统的运行情况如下:系统启动时,首先进行自检,若设备检验正常,则机械手处于待料
5、位置,泵站电机处于卸荷状态.当控制系统检测到加工结束的信号传来时,机械手开始动作,其具体动作过程如下:原始位置 小手臂伸出 手指夹紧(抓住卡盘上的工件)经短时延时 手腕向左逆摆(从卡盘上卸下工件)大臂旋转180!小手臂伸出(上料)开关发出料到位信号 手指松开(放料)小手臂缩回 小手臂上摆(同时卡盘夹紧工件,机床开始加工)大手臂下摆 手指松开(将工件放在料架上)小手臂缩回 大臂旋转180!同时料架转位(转 60!)小手臂伸出 手指夹紧(抓住待加工的工件)大手臂上摆(从料架上取走工件)小手臂水平待料,系统原位卸荷.2?系统结构组成机械手的整个系统主要由控制系统、驱动系统和执行系统三部分组成,其结构
6、框图如图 2所示.图 2?机械手的系统结构图控制系统主要包括:位置检测装置、可编程控制器、主控柜、及主控面板(状态显示和操作按钮).位置检测装置主要由接近开关组成,用来检测机械手行程终点及有无工件,并把相关信号迅速传递到控制中心.驱动系统采用全液压驱动,保证了整机动作迅速、平稳,特别是满足了机械手伸缩臂的动作精度,及需承受大负载及运动性能等方面的特殊要求.执行系统由升降机构、回转机构、手臂伸缩机构、手部夹持机构、定位机构等组成,整体为圆柱关节式结构.与传统的上下料机械手不同的是:该系统采用了具有双夹持结构的手臂设计(如图 1 示),在其中一夹持机构卸料后,手臂旋转一定角度,另一夹持机构上料,在
7、两次上下料之间机械手臂往返各一次 与传统的往返各两次比较更加节省时间 效率更高.3?系统软硬件设计整个机械手的控制,是通过向系统提供符合要求的开关信号来实现的.即按机械手的动作要求,PLC 通过信号采集、控制液压系统的电磁换向阀的通断电,实现装置的自动或手动上下料.系统的硬件主要由机械本体、液压驱动系统、PLC 控制系统组成,软件系统主要通过 PLC 的编程实现.3.1?夹紧装置夹紧装置的传动主要有齿轮齿条传动、凸轮杠杆传动、由于要夹持工件的质量(50 Kg)比较大,为了简化机构,提高安全性能,我们采用凸轮杠杆机构,在液压杆上装上一个凸轮可以直接带动杠杆机构,从而夹紧工件.通过改变驱动液压缸的
8、液压油的压力就可以改变手指的夹紧力.手指的夹紧部分的结构如图 3 所示.图 3?机械手的夹紧装置由于夹紧的为钢性工件,为了提高安全性能,防止损坏工件,我们可以在夹紧部分加上一层橡胶,这样可以通过增大工件和手指之间的摩擦系数来增加安全性.通过橡胶的弹性变形来缓冲对工件的冲击,可以减轻乃至消除对工件的损坏.3.2?液压驱动系统在该液压系统(如图 4 所示)中,为防止各种干扰影响手指抓取工件,故采用双泵供油,其中左油泵专为手指的抓取提供驱动;并采用液压锁配合换向阀实现抓取工件时的锁紧和保压.手部的夹紧和松开动作的控制,是由双作用式活塞缸配合凸轮和连杆机构组合驱动,实现卡爪的圆弧开合;手腕、小手臂、大
9、手臂的摆动则是由摆动液压马达实现,手腕、小手臂可在相互垂直的两平面内摆动,大手臂可正反旋转 180!;为防止突然断电时手指松开,大、小臂倒下来,在手指夹紧油缸和大、小臂油缸的控制回路中采用液控单向阀.并在液压回路中配置限位开关,压力继电器和位置传感器来实现动作的换接控制.在该系统中 机械手的运动都可采用调节调速54?湖南工程学院学报?2005 年阀来获得不同的运行速度.同时还设置急停和复位按钮,和防干扰的互锁、故障报警等装置.图 4?液压系统图3.3?PLC 控制系统根据系统控制信号的数量,本系统选用三菱FXON-60MR-D 型可编程控制器.该 PLC 自带编程器,能实现离线及在线编程,还可
10、以结合实际的工程要求,调整控制程序,实现机械手的不同动作,实现了柔性化设计.该机械手在 PLC 控制下可实现手动、连续动作两种工作方式(主程序流程图如图 5 所示),其手动方式是指利用按钮对机械手每步动作单独进行控图 5?PLC主程序流程图制,连动方式是指机械手根据控制信号自动循环执行每步动作,直至获得停止信号.系统启动后,根据工序要求,通过旋转按钮确定机械手的工作方式为单动或连动形式,如果选择单动则执行手动程序,否则默认执行连动程序.PLC 的自动控制程序的编写方法很多,根据本次设计中机械手的特点,要求每一个动作严格按顺序执行,因此采用步进指令编写,可保证机械手的运行有条不紊 即使出现误动作
11、也不会造成混乱 图 6即为机械手动作过程控制的梯形图.机械手的动作执行过程如下:系统启动,机械手处于待料状态,当获得取料信号,机械手开始动作,从原点出发按工序自动循环工作,直到接受停止信号,机械手在完成最后一个周期的工作后,返回原点,自动停机.图 6?机械手动作过程控制梯形图为避免因压力不足或机械手动作不到位造成的误动作,系统设置了延时报警系统(如图 7 所示).图 7?延时报警系统梯形图当某一液压缸因故障被卡超过设定时限,延时报警系统将动作:设 Y5 为控制该缸动作的继电器,X5 为对应动作的限位,若该动作超时,对应的时间继电器 T4 将动作,则 T 4 的动合触点接通,首先接通 Y18,切
12、断电源,停机.因故障排除按钮为动作,内部继电器 R0 未导通,则 Y16 接通,与之相连的报警蜂鸣器通电发声报警,与此同时 R901C 到通后周期性的通断,通过已接通的 T0,导通 Y17,使与之相连的报警指示灯不停闪烁,提醒工人排除故障,从而避免故障加重造成损失.一旦按下故障排除按钮,X14接通,内部继电器导通,其动断触电打开,蜂鸣器停止报警,报警灯熄灭.(下转第 62 页)55第 2 期?付?愚:基于 PLC 的液压机械手的控制系统?2?3?造型基础设计是通向工业设计的桥梁.在培养学生的立体造型能力方面,一些设计院校把立体造型设计作为主要的训练途径,它确实在培养学生的空间想象能力和形态创造
13、能力方面有很好的作用,但是,立体构成仅是一种纯粹的形态创造.学生往往忽视了对产品立体造型的基本构成要素,诸如功能、材料、构造等方面进行系统深入的研究和训练,在进入产品设计后就会显得力不从心,设计出的立体造型无法对产品立体造型进行实质性的创造.因此本课程的立体造型设计应结合产品立体形态构成中的功能、材料、机能、结构等关键要素进行训练,从而逐步引导学生从纯粹的形态设计向产品立体造型创造过度.同时也给学生在造型设计时提供自由的空间去发挥他们的想象能力和创造能力.总之造型基础设计教学在整个工业设计教学中是一个及其重要的环节.参?考?文?献1?程能林.工业设计概论 M.北京:机械工业出版社,1999.2
14、?冯?峰.设计素描 M.广州:岭南美术出版社,2000.3?刘国余,沈?杰.产品基础形态设计 M.北京:中国轻工业出版社,2001.On the Education of Modelling Basis in Industrial DesignPENG Lie-hong(Dept.of Mech.and Elect.Eng.,Hunan Institute of Engineering,Xiangtan 411101,China)Abstract:The Education of Modelling basis in industrial design should give priority
15、 to the cultivation of the ca?pability of industrial design and lead the students to the transformation from a concept of drawing modelling tothat of industrial design modelling.The function of color in industrial design should also be taken intoaccount inthe process of training so as to develop the
16、 students ability of modelling in color design.Only so,will the studentget to know the importance and research orientation of the design of modelling basis.Key words:industrial design;modellling basis;design ability;creative thinking(上接第 55 页)4?结束语本系统采用 PLC 对数控机床上下料机械手进行控制,实现了手动、连动、互锁、状态显示、延时报警等功能,具
17、有较强的抗干扰能力,良好的可靠性,经调试检验,该系统运行符合程序设计要求,具有良好的协调运行性能.参?考?文?献1?张?波等.多功能上下料用机械手液压系统.液压与气动 J,2,2002,31-322?徐?德等.可编程控制器 PLC 应用技术 M.山东科学技术出版社,2001.3?Yasuo Aoki,Kazuo Ue hara,Ka zu yu ki Hirose.LoadSensing Fluid Power System J.SAE paper,941714.4?朱春波等.PLC 控制的气动上下料机械手 J.液压气动与密封,1999,78(6).12,21-24H62?湖南工程学院学报?2005 年
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
