 IAI机械手控制器设置软件
IAI机械手控制器设置软件

《IAI机械手控制器设置软件》由会员分享,可在线阅读,更多相关《IAI机械手控制器设置软件(11页珍藏版)》请在装配图网上搜索。
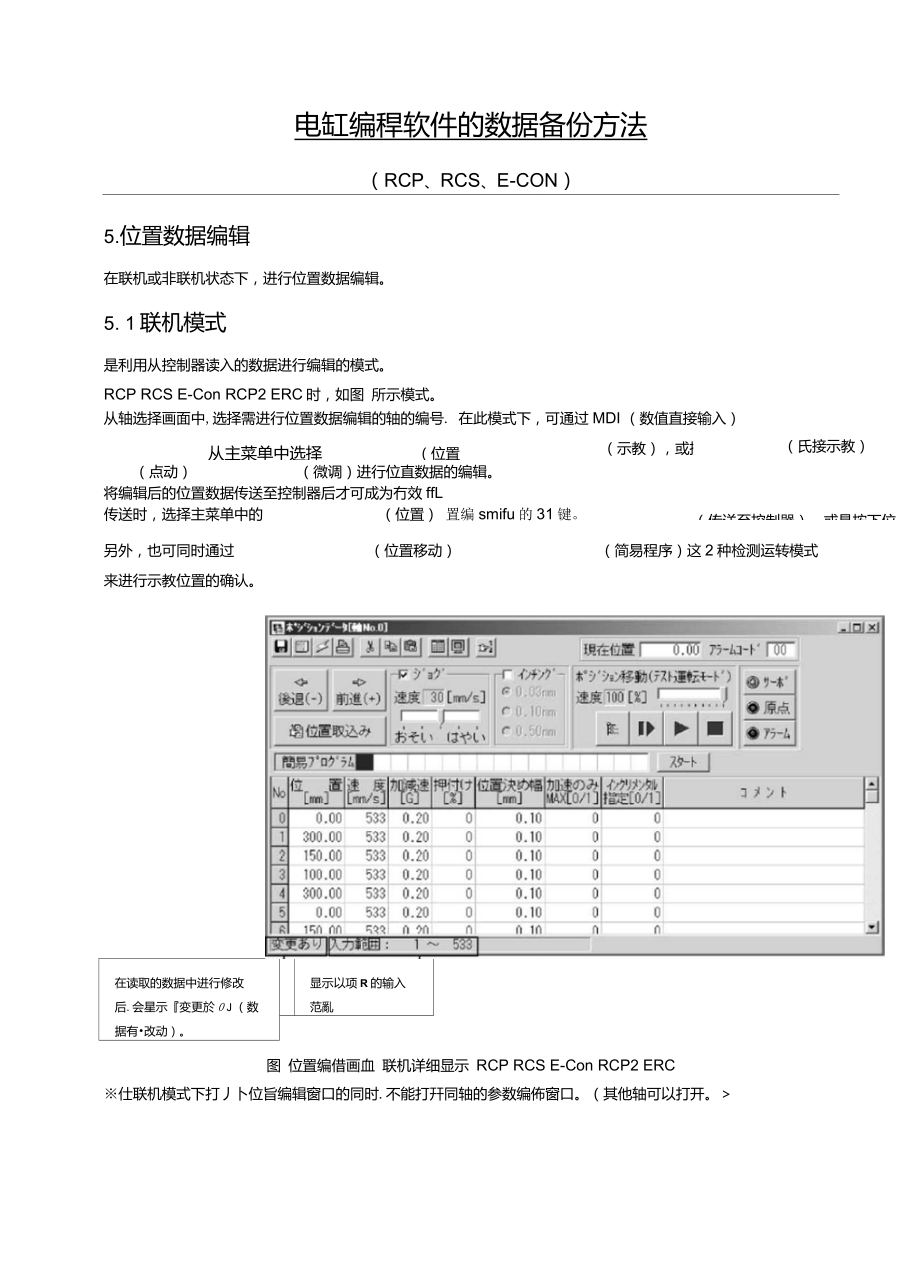
1、电缸编稈软件的数据备份方法(RCP、RCS、E-CON)5.位置数据编辑在联机或非联机状态下,进行位置数据编辑。5. 1联机模式是利用从控制器读入的数据进行编辑的模式。RCP RCS E-Con RCP2 ERC时,如图 所示模式。从主菜单中选择(位置(示教),或按艺I淀。-1 -# -(氏接示教)(传送至控制器),或是按下位从轴选择画面中,选择需进行位置数据编辑的轴的编号. 在此模式下,可通过MDI(数值直接输入)(点动)(微调)进行位直数据的编辑。将编辑后的位置数据传送至控制器后才可成为冇效ffL传送时,选择主菜单中的(位置) 置编smifu的31键。另外,也可同时通过(位置移动)(简易程
2、序)这2种检测运转模式来进行示教位置的确认。在读取的数据中进行修改显示以项R的输入后.会星示変更於0 J (数范亂据有改动)。图 位置编借画血 联机详细显示 RCP RCS E-Con RCP2 ERC仕联机模式下打丿卜位旨编辑窗口的同时.不能打幵同轴的参数编佈窗口。(其他轴可以打开。-# -各键、输入部的操作方法如下所示。(1)工具栏(S) x|fe|e| 理團鬪图位辻数据编辑画ifilTJl条 文件保存将数据保存至文件。 传送至控制器将数据传送(写入) 位置数据再读出至控制器。从控制器再读出位置数据后,就会更新数据显示.在编辑画面中改变位置数据时,会出现如图5. 5所示的警告对话框。选择舸
3、(是)后,编辑中的(未写入控制器)数据将被清除。请注意。/ ! 書迖gfttcae -全工失送九如Y |1匚探凹鳥数据C被更改-如不进行9入.数据将被沽除.町以执行吗?图 警告对话框 打印位置数据传送至打印机。显示出打印设定画而,设定完上左行余白(mm)及打卬方向后即可打印. 剪切a :位置数据输入区域剪切选疋的数据选择时以行为单位。 复制在位置数据输入区域复制选定的数据.选择时以行为单位。 粘贴将在位置数据输入区域将复制或剪切的数据粘贴到选定位置。显示切换将位置数据输入区域的显示在怦通显示和详细显示这2种模式间切换。(图 5.20、图 5.21)监控謝口显示显示当询编辑中轴的状态监控窗口。
4、此时眾示的窗II,和通过主菜单选择 同。(监控)(状态)的显示相(8 )位置数据输入区域(型号:RCP,RCS,EC0N,RCP2,ERC)输入位置数据。在普通状态下,可对显示)犍亘切换到详细显示状态,就可进一步对(仅加速最大)(注释)这4项输入,用(切换(按压)(定位距离)(增星型指定)的输入。图5.20位置数据输入区域(普通显示状态) No.显示位置数据编码。 位世输入驱动轴移动的目标位巻。mm绝对坐标指定:输入从原点到冃标位置的距离。不能输入负数。相对坐标指定:输入从出询位置到n标位蛙的距离。能输入负数。(显示坐标的负方向时)注意 输入值可能因不符控制器的放小分辨率而丢失数据。 从控制器
5、读入数据时 速度输入轴的移动速度。mm/sec初始值因骡动轴的型号而异。 加减速输入轴移动时的加减速度。G初始值因骡动轴的型号而异。 按压选择定位模式或按压模式。初始值为0。0:定位模式(=普通动作)0以外:按压模式%按压模式时,须输入乌达的电流限制值。请输入与驱动轴型号相符的值,最大电流值为100 o 定位距离在定位模式下,输入的是定位完了检出距离(至日标位置的距离)。mm这里输入的“至口标位置的距离”的值,是拆相其到达口标位置就的距离,当驱动轴移动至山这 个设定的值所确定的范圉内时,就会输出定位完了信号。初始值因驱动轴的型号而异。(图A)按压模式下输入的足嚴大按压距离(离开11标位置的距离
6、).mm(図B)按爪方向为坐标的负方向时,输入负数值。 仅加速MAX选择指左加速度或瑕人加速度。输入0或1。 初始值为00 :指定加速度即为第项输入的值。1 :最大加速度自动调整到与负載相应的最大加速度 减速值为输入。仅加速M AX=1时厂为设定的加减速仅加速MAX=1时片负载相应的让大加速度为设定的相对型指定选择绝对坐标或相对坐标。0 :指定为绝对坐标1 ;指定为相对坐标52非联机模式在进行新建或从文件读入时的編辑为非联机模式。此模式下,不显示与轴动作育关的部分,仅工具条及位置数据输入部为有效状态。从文件读入位置数据时,点击 y r(F)J (文件)一開(O)(打开),即打开r 開(打开文件
7、)窗口。或者点击f 7 r Ji (F) J (文件)一二債卜口 一転送(L)(传送至控制器)-才; (T)(位置),也可打开t彳儿i開 (打开 文件)窗口。已存的文件选择保存位置数据的文件选择控制图5. 22 打开文件画面选择要打开的7 了彳儿名(文件名),点击r Y f開(打开文件)画血的開(0)(打开),打开位置编辑画面。数拥编辑后,可以保存、传送至文件或联线状态的控制器中.将从文件读入的位置数据传送到联线状态的控制器中时,点击r 3 (T)j (位置)一3 A卜-転送 (L) J (传送至控制器),或是点击位置编Sliujiifti的旦键。弹出选择轴的画ifti 选择传送的控制器的轴编
8、号o点击选择轴画面中的roKj ,位置数据即被传送至控制器。孤= 卜(注释)只可保存在电脑的文件中。不能保存在控制器中。6参数编辑从控制器读入参数数据时,选择主菜单中的,只一夕(P)(参数)一編集 (E)(编辑), 或足点击里饥。从选择轴的iiuiifiil-选择耍进行参数编辑的轴的编匕。从文件读入参数时,选择丁 /彳儿 (F) J (文件)一開 (O)(打开),即弹出刁了 彳儿壬開 打开文件的画面。或者选择丁 r i (F) J (文件)一二 卜口 一严八耘送 (|_) (传送至控制器)一|八夕(M)(参数),弹出7 r m 開(打开文件的iiilirftio已存的文件选择保存位置数据的文件
9、夹。选择控制器。图6.1r開 (打开文件)仙血选择要打开的2 了彳儿名(文件名),点击7 儿壬開 (打开文件)画面的開(O) J(打开),弹出参数编辑画面。可从控制器或文件读入、编辑数据。而且,也能打印读入的数据。编辑的数据能传送、保存至控制器或文件中。编辑的数据传入控制器后,当再次接入电源即变成有效值。传送时,点击主菜单中的八 -9(P)(参数)一O債卜口 一亍f耘送 (L)(传送至控制器),或点击参数编辑画血的回键。将从文件读入的参数传送至控制器时,点击P (参数)送至控制器),或点击参数编辑画何的I创键。弹出轴选择画面,选择传送控制器的轴编号。(传传送参数至控制器。I/HJ 沁谜庞占51
10、XW咖请确认参数文件的保存地址和 传送地址的轴的型号徴。如传送至不同机科就会引发严 垂故障。可以执行向控制器的传送吗?3“ XttMuOlNoJ77丁少竟界側山血 /T境界1 側rr荷 万WI側w 刀卜畑卜僻mn0.03145.15 -0.15用占復丿畫询f:逆小OF11押付(才停1卜电W倔号 理媳価计込丽碗度7醐澈G25550 J.30 0.10)tg临空诙揃hi M讪 田巫?蓼礎邸晦a皿 HII世川丄11 IWFF同目衽爲皿JK5趣诂俪TMffSgW1011::4iil 厂5J820书:加:拡哥;zm10.209999.99gQq 乂在选择轴的画面中,点击OK ,弹出以下腎告对话框。点击(
11、是)图参数编辑価面注总:打开位置编辑画而的同时不能打开参数编辑画面。按下更键,虽然惮出选择轴的Rifn但不显示可选择的轴。注意:在更改参数后,请再接入控制器电源,或进行软件复位可软件复位功能的机型O如仅仅OFF、ON急停开关或PORT开关,则虽可改写数据但不能使其变成冇效值。7.监视能够监控各种状态及控制器错误列表。7. 1状态监视画面监视各种状态时,点击主菜单中的(监视)(状态),或点击團键。从选择的轴画面中,选择须监视的轴的编号。RCP、PCS、ECON、RCP2、ERC轴状态当前位置当询速度移动中的速度错误代码内部标记主电源 控制器主电源/OFF状态 何服ON伺服指令状态原点复位原点复位完了标记ON/OFFRUN实际的伺服状态输入显示PIO输入端口 0 N/OFF状态。输出显示PIO端口 O N/OFF状态.昭示ON/OFF键 从左起为轴状态、内部标记、输入、输出注 以下的输出,即使带有此些功能 的机空也不显示.急停 移动中 电池报警只有带(PIO模式选择功能)参数的机型时,才显示当前选择的PIO模式编号。输入输出端I的名称显示顺序则根据PIO模式选择的参数值而杲.11
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
