 过程控制系统简答题
过程控制系统简答题

《过程控制系统简答题》由会员分享,可在线阅读,更多相关《过程控制系统简答题(6页珍藏版)》请在装配图网上搜索。
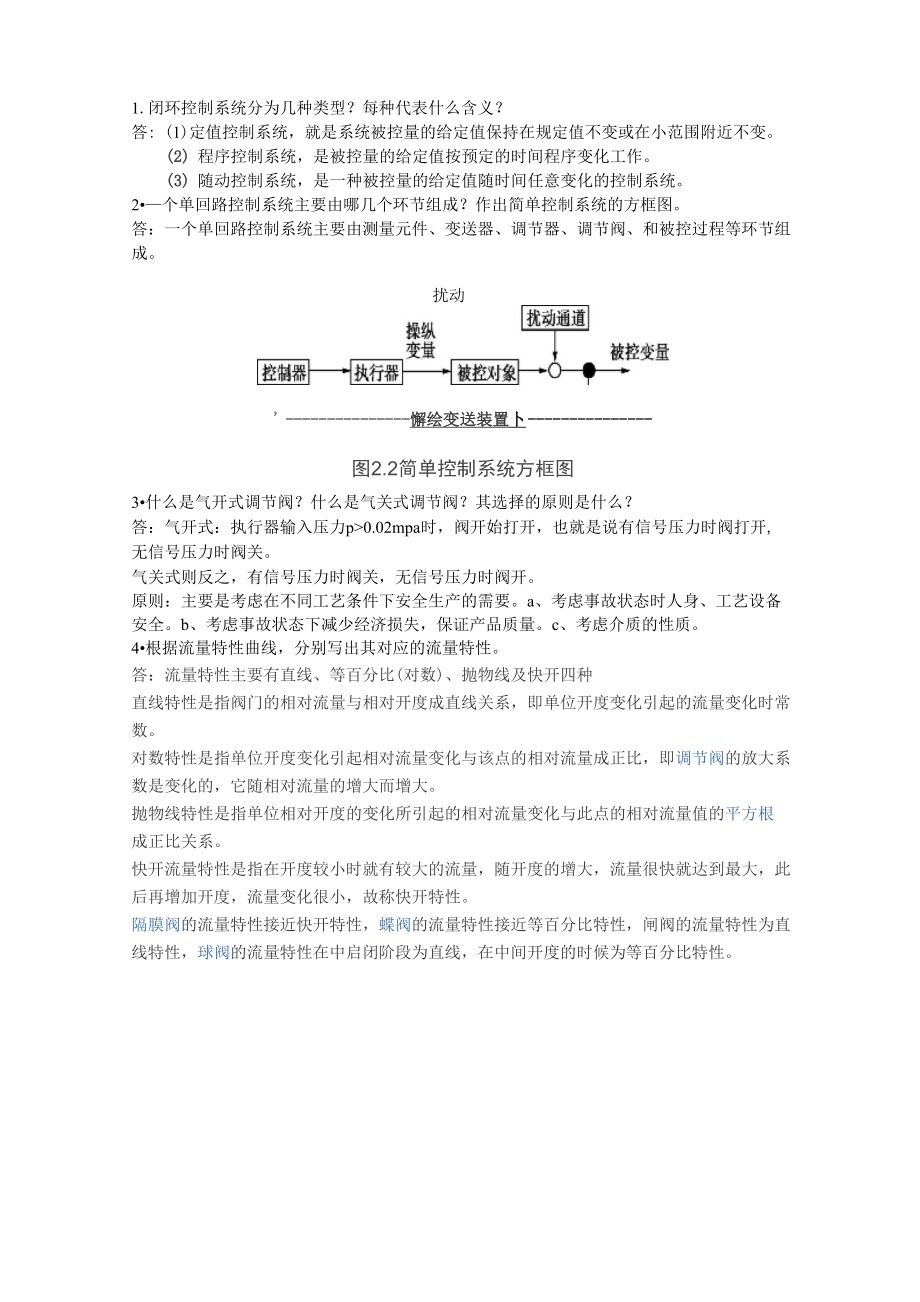
1、1.闭环控制系统分为几种类型?每种代表什么含义?答: (1)定值控制系统,就是系统被控量的给定值保持在规定值不变或在小范围附近不变。(2) 程序控制系统,是被控量的给定值按预定的时间程序变化工作。(3) 随动控制系统,是一种被控量的给定值随时间任意变化的控制系统。2个单回路控制系统主要由哪几个环节组成?作出简单控制系统的方框图。答:一个单回路控制系统主要由测量元件、变送器、调节器、调节阀、和被控过程等环节组 成。扰动懈绘变送装置卜图2.2简单控制系统方框图3什么是气开式调节阀?什么是气关式调节阀?其选择的原则是什么?答:气开式:执行器输入压力p0.02mpa时,阀开始打开,也就是说有信号压力时
2、阀打开, 无信号压力时阀关。气关式则反之,有信号压力时阀关,无信号压力时阀开。原则:主要是考虑在不同工艺条件下安全生产的需要。a、考虑事故状态时人身、工艺设备 安全。b、考虑事故状态下减少经济损失,保证产品质量。c、考虑介质的性质。4根据流量特性曲线,分别写出其对应的流量特性。答:流量特性主要有直线、等百分比(对数)、抛物线及快开四种直线特性是指阀门的相对流量与相对开度成直线关系,即单位开度变化引起的流量变化时常 数。对数特性是指单位开度变化引起相对流量变化与该点的相对流量成正比,即调节阀的放大系 数是变化的,它随相对流量的增大而增大。抛物线特性是指单位相对开度的变化所引起的相对流量变化与此点
3、的相对流量值的平方根 成正比关系。快开流量特性是指在开度较小时就有较大的流量,随开度的增大,流量很快就达到最大,此 后再增加开度,流量变化很小,故称快开特性。隔膜阀的流量特性接近快开特性,蝶阀的流量特性接近等百分比特性,闸阀的流量特性为直 线特性,球阀的流量特性在中启闭阶段为直线,在中间开度的时候为等百分比特性。IfL/%图$13各种阀门的流肚持性5什么是积分饱和现象?防止积分饱和的措施都有哪些?所谓积分饱和现象是指若系统存在一个方向的偏差,PID控制器的输出由于积分作用的不断 累加而加大,从而导致u(k)达到极限位置。此后若控制器输出继续增大,u(k)也不会再增大, 即系统输出超出正常运行范
4、围而进入了饱和区。一旦出现反向偏差,u(k)逐渐从饱和区退出。 进入饱和区愈深则退饱和时间愈长。此段时间内,执行机构仍停留在极限位置而不能随着偏 差反向立即做出相应的改变,这时系统就像失去控制一样,造成控制性能恶化。这种现象称 为积分饱和现象或积分失控现象。1.积分分离法2变速积分PID控制算法3超限削弱积分法4有效偏差法5抗积分饱和机制6简述前馈-反馈控制系统的优点。1馈一反馈复合控制系统的到了广泛的应用2很显然 前馈牙论加在什么付詈 都不矣构成冋路 系统的特征式都保持不变因而不会影响系统的稳定性。37什么是比值控制系统?常见的比值控制方案有哪些?答:实现两个或两个以上的参数符合一定比例关系
5、的控制系统,称为比值控制系统。通常为 流量比值控制系统,用来保持两种物料的流量保持一定的比值关系。开环比值控制系统,单闭环比值控制系统,双闭环比值控制系统,变比值控制系统8控制器参数整定的任务是什么?常用的整定方法有几种?答:控制器参数整定的任务是,根据已定的控制方案,来确定调节器的最佳参 数值(包括比例度,积分时间,微分时间)。以便是系统能获得好的调节质量。常用的整定法有:临界比例度法,衰减曲线法,和经验凑试法。控制器参数整定的任务是:根据已定的控制方案,来确定控制器的最佳参数值(包 括比例度小积分时间TI;、微分时间TD),以便使系统能获得好的控制质量。 控制器参数整定方法有理论计算和工程
6、整定两大类,其中常用的是工程整定 法。属于控制器参数工程整定法主要有临界比例度法、衰减曲线法和经验凑试1 法等O9与单回路控制系统相比,串级控制系统有什么特点?答:1.改善了过程的动态特性,提高了系统控制质量。2能迅速克服进入副回路的二次扰动。3.提咼了系统的工作频率。对负荷变化的适应性较强10简单控制系统中,控制器的正反作用应怎样选择?(1) 根据生产工艺的安全性先确定执行器的采用气开阀(+),还杲气闭阀(-)o(2) 在根据对象x -执行器” x “控制器”负反馈来确定控制器的正、反作用。11.与反馈控制系统相比,前馈控制系统有哪些特点?答:(1)反馈控制的本质是基于偏差来消除偏差,而前馈
7、控制是基于扰动来消除扰动对被控 量的影响;(2)反馈控制是“不及时”的,而前馈控制器可“及时”动作;(3)反馈控制属闭环控制,而 前馈控制属开环控制;反馈控制对闭环内扰动均有校正作用,而前馈控制具有制定性补偿的局限性;(5)反馈控 制规律通常有P、PI、PD、PID等,而前馈控制规律比较复杂。12串级控制系统有哪些特点?主要使用在哪些场合?答串级控制系统的主要特点为:(1) 在系统结构上,它是由两个串接工作的控制器构成的双闭环控制系统;(2) 系统的目的在于通过设置副变量来提高对主变量的控制质量(3) 由于副回路的存在,对进入副回路的干扰有超前控制的作用,因而减少了干扰对主变 量的影响;(4)
8、 系统对负荷改变时有一定的自适应能力。串级控制系统主要应用于:对象的滞后和时间常数很大、干扰作用强而频繁、负荷变化大、 对控制质量要求较高的场合。13. 什么是控制通道和扰动通道?对于不同的通道,对象的特性参数对控制有什么不同的影 响?对于一个被控对彖来说,是扰动呈轴操纵变呈,而输出是被控变呈-由村線的输入变呈至输出变呈的信号联系称为迪道。操纵变量至被控变量的怕号联系称沖控制通道:扰 动呈至被控变呈的忙号联系称询扰动迪道=一股来说,对于不同的通道.对線的特性參数(匕T. r )对控制作用的影响是不同的-对于控制迪道:放大慕数K大,操纵变量的变化对被控变呈的影响就夫,即控制作用村扰动的补偿 能力
9、强,余差也小;放大聲数K小,控制作用的蠢响不显著,被控变址的变化缓慢.但& 盍大,会便控制作用对被控变莹的册响过强,便系统的稳定性下降在相同的控制件用下,时间常数T大,则被控变呈的变化叱较缓慢此时对線比较 平稳,容易进行控制,但过波过程时间较怅:若时间常数T小,则被控变址变化速度快, 不易控制-时间常数丈大或衣小,在控制上都将存在一定因难,因此,需根据丈际情况适中 垮虑-滞后时问t的存在,便得控制作用总是落后于被控变虽的变牝,造成披控娈虽的最大 偏差増大,控制质基卞降。因此,应尽呈减小滞.后时间! 对于扰动通道:放大泵数反大瀚控制不利,因沟,严扰动规繁出现且幅度较大时,被控变虽的波动 就会很大
10、,使需虽大偏差增大:而放大系数氐小,既使扰动较大对被控变虽仍然下会产 土多大蠢响。时间常数T大,扰动作用比较平缓,被控变址变化较平稳对彖较易控制纯術后的存在,相当于将扰动推迟口时间才诳入系统,井不影响控制慕统的品顾: 而容呈滞后的存在则将便附班扰动的謬响趋于缓和,被控变呈的变化相应也缓和些,圜此 对系统是有刊的-14. 作出串级控制系统的方块图。15如何选择串级控制系统中主、副控制器的正、反作用?夬图答副控制器的作用方向与副对象特性、控制阀的气开、气关型式有关,其选择方法与简单控 制系统中控制器正、反作用的选择方法相同,是按照使副回路成为一个负反馈系统的原则来 确定的。主控制器作用方向的选择可
11、按下述方法进行:当主、副变量在增加(或减小时),如果要求控 制阀的动作方向是一致的,贝I主控制器应选“反”作用的;反之,贝I应选“正”作用的。从上述方法可以看出,串级控制系统中主控制器作用方向的选择完全由工艺情况确定,或者 说,只取决于主对象的特性,而与执行器的气开、气关型式及副控制器的作用方向完全无关。 这种情况可以这样来理解:如果将整个副回路看作是构成主回路的一个环节时,副回路这个 环节的输入就是主控制器的输出(即副回路的给定),而其输出就是副变量。由于副回路的作 用总是使副变量跟随主控制器的输出变化而变化,不管副回路中副对象的特性及执行器的特 性如何,当主控制器输出增加时,副变量总是增加
12、的,所以在主回路中,副回路这个环节的 特性总是“正”作用方向的。由图可见,在主回路中,由于副回路、主测量变送这两个环节 的特性始终为“正”,所以为了使整个主回路构成负反馈,主控制器的作用方向仅取决于主 对象的特性。主对象具有“正”作用特性(即副变量增加时,主变量亦增加)时,主控制器应 选“反”作用方向,反之,当主对象具有“反”作用特性时,主控制器应选“正”作用方向。16. 控制器的P、PI、PD、PID控制规律各有什么特点?答:比例控制规律适用于控制通道滞后较小,时间常数不太大,扰动幅度较小,负 荷变化不大,控制质量要求不高,允许有余差的场侖。如贮罐液位、塔釜液位的控制 和不太重耍的蒸汽压力的
13、控制等。比例积分控制规律引入积分作用能消除余差.适用丁控制通道滞后小,负荷变化不 太大,工艺上不允许有余差的场合,如流量或压力的控制。比例微分控制规律引入了微分,会有超前控制作用,能使系统的稳定性增加,最大 偏差和余差减小,加快了控制过程,改善了控制质量。适用丁过程容量滞后较大的场 合.对丁滞后很小和扰动作用频繁的系统,应尽可能避免使用微分作用.比例积分微分控制规律可以使系统获得较高的控制质量,它适用于容量滞后大、负 荷变化大、控制质量耍求较高的场合,如反应器、聚合釜的温度控制。17. 在过程控制系统中,测量变送装置、控制器、执行器各起什么作用。检测元件和变送器用于检测被控变量并将检测到的信号
14、转换为标准信号,输岀到控制器。 控制器用于将检测变送器的输出信号与设宦值进行比较,得出偏差,并把偏差信号按一定的 控制规律运算,运-算结果输出到执行器执行器是控制系统回路中的最终元件,直接用于改 变操纵量,以克服干扰,达到控制的目的。18. 分析在什么场合下选用比例,比例积分,比例积分微分调节规律?卷驻比例说苹规洋适用于玫葡麦化较小、沌滞后不扯丸币丁.艺要求不岛、貝允详有余差的制节系統.C2)比例秩令调节現徉适用于对鋭调节通道时间常数较八、義统咬右吏化找丸希要罡除千扰引赳芮余差农馳滞与不九吋问當獄环是丈之)打被说馥数不允祚与谖定備有偏差肘调卞飛统“(3)比捌扳辱徹分调节规徉至用于疹垂滞后咬丸、
15、纯滞匕扛丸71、不允祚有余差衬隶“20. 临界比例度的意义是什么?为什么工程上控制器所采用的比例度要大于临界比例度?蕃乩 改变控制器芮比倒度恰说变慕焼的玉建二程形式“当桃制聚统在阶廠输入作用曲,能便談烷产上等 惇捱裁过渡过程妁比创度前数值称舌临界比咧度“弐宝际的比刮虎小于订界比倾度酣議值曲,杲統烧 兀稳定,龙是生产匕工允拧为.所氐工程上控制誥.所采用的比例.度要丸二临弄龙例度”21. 按照设定值的不同形式,过程控制系统可分为哪几类? 按照设定值的不同形式又可分为:1.定值控制系统定值控制系统是指设定值恒定不变的控制系统定值控制系统的作用是克 服扰动对被控变量的影响,使被控变量最终回到设定值或其
16、附近以后无特殊说明控制系统 均指定值控制系统而言.2随动控制系统随动控制系统的设定值是不断变化的随动控制系统的作用是使被控变量 能够尽快地,准确无误地跟踪设定值的变化而变化3程序控制系统程序控制系统的设定值也是变化的,但它是一个已知的时间函数,即设定 值按一定的时间程序变化。22. 何为控制阀的理想流量特性和工作流量特性?常用的调节阀理想流量特性有哪些? 假定阀前后压差保证不变时,调节阀的流量特性称为理想流量特性,它只取决于阀芯形状, 实际使用中,阀前后压差总是变化的,此时调节阀的流量特性称为工作流量特性,它取决于 阀芯形状和配管状况常用的是直线、等百分比、快开三种23前馈控制与反馈控制的区别
17、有哪些?前馈控制对控制器的要求非常严格,即前馈控制系统中的人必须具有开发的意识; 而反馈控制可以利用信息流的闭合,调整控制强度,因而对控制器的要求相对较低。24. 串级控制系统中主、副变量应如何选择?答 主变量的选择原则与简单控制系统中被控变量的选择原则是一样的。副变量的选择原 则是:(1) 主、副变量间应有一定的内在联系,副变量的变化应在很大程度上能影响主变量的变 化;(2) 通过对副变量的选择,使所构成的副回路能包含系统的主要干扰;(3)在可能的情况 下,应使副回路包含更多的主要干扰,但副变量又不能离主变量太近;(4) 副变量的选择应考虑到主、副对象时间常数的匹配,以防“共振”的发生25.
18、 什么是均匀控制系统?它有何特点?答均匀控制系统是为了解决前后工序的供求矛盾使两个变量之间能够互相兼顾和协调 操作的控制系统。均匀枠制系统的特点杲其枠制结果不像其它枠制系统那样 不杲为了伸被扌牢变量保持 不变 而是使两个互相联系的变量都在允许的范围内缓慢地变化。均匀控制系统中的调节器 一般都采用纯比例作用日上匕例度很大必要时才引入少量的积分作用。26. 对象的时间常数T指的是什么?答案:对象的时间常数T,是表示扰动后被测量完成其变化过程所需时间的一个重要参数, 即表示对象惯性的一个参数。T越大,表明对象的惯性越大。27. 比例控制作用有何特点?答:比例作用的优点是动作快。它的输出无迟延地反映输入的变化,是最基本的控制作用。 缺点是调节结束后被控量有静态偏差。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
