 剪叉式升降机举升机构分析与优化_胥军.pdf
剪叉式升降机举升机构分析与优化_胥军.pdf

《剪叉式升降机举升机构分析与优化_胥军.pdf》由会员分享,可在线阅读,更多相关《剪叉式升降机举升机构分析与优化_胥军.pdf(8页珍藏版)》请在装配图网上搜索。
1、 2013 年6 月机 械 科 学 与 技 术June2013第 32 卷第 6 期Mechanical Science and Technology for Aerospace EngineeringVol 32No 6剪叉式升降机举升机构分析与优化胥 炎保安( 理工大学 机电工程学院,430070)胥军摘要: 描述了剪叉式升降机升机构整体运 情况 然后分升油缸、升降平台的运程 行了分析; 通 升机构的受力分析 得到了受力最大的 点; 最后通 剪叉杆的 度 行校核和 升油缸的安装位置 行 整 提出了 机构的 构 化方案 化后不 提高了 升机构的 定性 机构 油缸的推力要求也得到了大幅降低。关
2、键词: 剪叉式升降机;升机构; 构 化中图分类号: TP393文献标识码: A文章编号: 1003-8728( 2013) 06-0919-04Analysis and Optimization for Lifting Mechanism of Scissor-fork LifterXu Jun,Li Gangyan,Yang Fei,Yang Baoan( School of Mechanical and Electric Engineering,Wuhan University of Technology,Wuhan 430070)Abstract: Key structure param
3、eters were verified and optimized through Kinematic analysis and mechanical analysis for the lifting mechanism of a common scissor-fork lifter The whole movement of the mechanism was described firstly,and then detailed analysis was performed for the lift cylinder and the lifting platform The maximum
4、 stress point was obtained through load bearing analysis for the lifting mechanism Finally,optimizing scheme was presen-ted based on strength checking for the scissor rod and adjusting installation point of the lift cylinder The results of in-situ test showed that the stability of lifting mechanism
5、was improved and the demand on the driving force of hy-draulic cylinder was greatly reducedKey words: optimization; mechanisms; scissor-fork lifter; lifting mechanism; structure optimization剪叉式升降机是一种用途广泛的高空作业专业机构进展运动学、力学分析的根底上,对其关键参数设备,它具有剪叉式举升机构,使升降台起升有较高 进展校核与优化。 的稳定性、宽大的作业平台和较高的承载能力1,高空作业围大、并适合多人
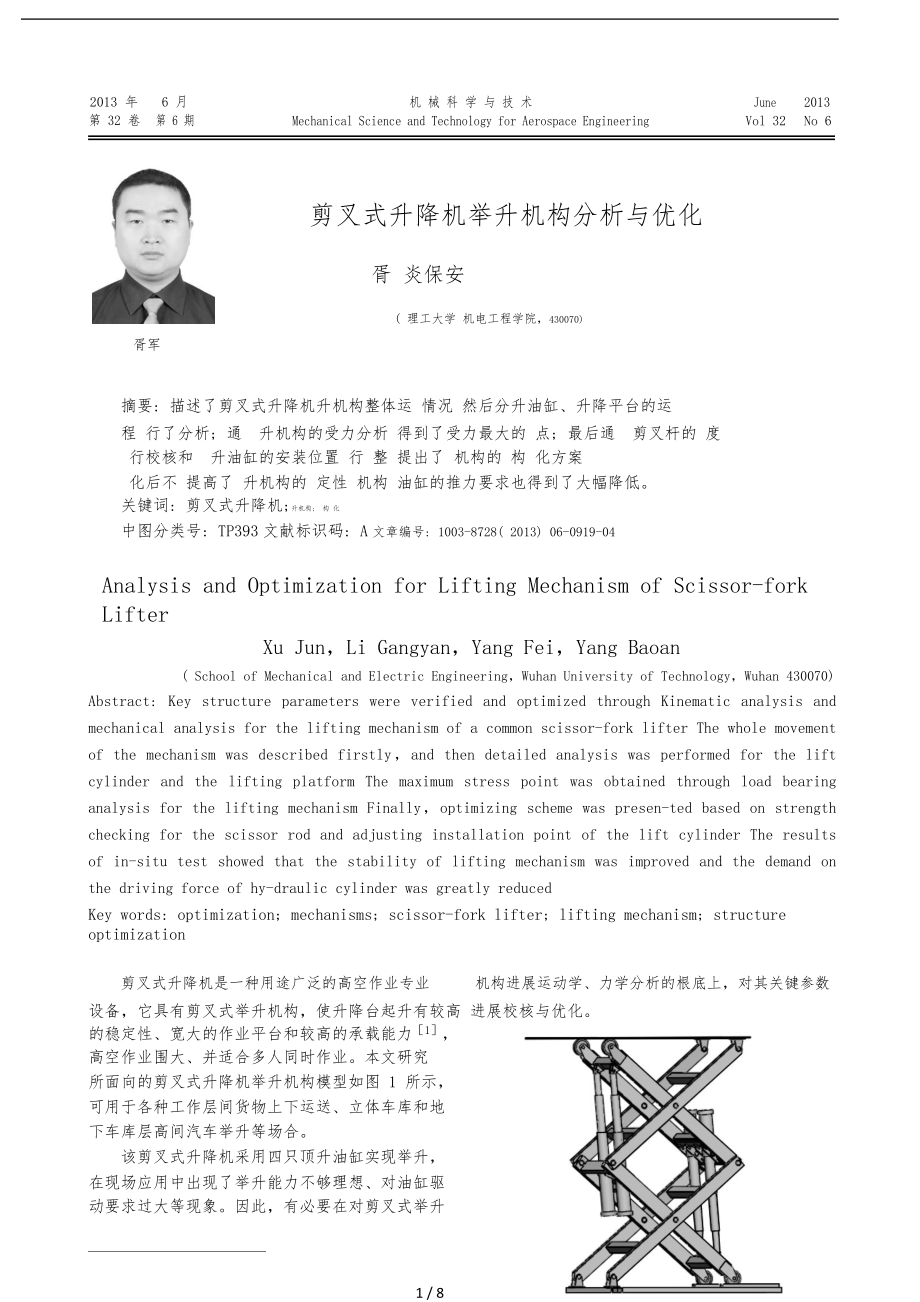
6、同时作业。本文研究所面向的剪叉式升降机举升机构模型如图 1 所示,可用于各种工作层间货物上下运送、立体车库和地下车库层高间汽车举升等场合。该剪叉式升降机采用四只顶升油缸实现举升,在现场应用中出现了举升能力不够理想、对油缸驱动要求过大等现象。因此,有必要在对剪叉式举升收稿日期: 2012-03-13基金项目: 中央高校根本科研业务费专项资金项目( 133204001) 和市青年科技晨光计划项目( 7) 资助作者简介: 胥军( 1977) ,副教授,博士,研究方向为机电一体化图 1剪叉式升降机举升机构简图8 / 8和机械装备故障诊断,xujunwhut 163 920机 械 科 学 与 技 术第
7、32 卷1 举升机构运动分析为便于分析,可将该剪叉式升降机举升机构运动简化为二维平面两个举升油缸对系统一半载荷2,3,举升运动依据瞬时速度中心法 采用几何作图法即可得到剪叉杆 DH、AE 瞬时速度中心,分别记为M 点和 D 点,举升机构整体运动学分析如图 2 所示。图 2举升机构整体运动学分析图 3载重平台竖直运动速度与举升机构角度 关系由于 AB = NH 恒成立,载重平台水平运动速度与下部滚轮 A 运动速度相等。经计算可得(b2+ L2 + 2bLcos( 2)sin() +V= V2NX12Lsin( L22La) sin2 + a2sin3 )( 3)Lsin将活塞轴向运动速度参数代入
8、式( 3) ,即可得到举升机构载重平台水平运动速度与举升机构角度 之间的关系如图 4 所示。1. 1举升油缸运动分析在举升机构油泵供油流量前提下,可求得油缸活塞轴向运动速度 V1 000 Q R( 1)V =4 60 ( 0. 5 D) 2式中: V 为举升油缸活塞杆轴向运动速度; D 为举 升油缸径; Q 为双联齿轮泵排量; R 为双联齿轮泵转速。对该剪叉式升降机举升机构液压系统实测得到关键参数包括: Q = 41mL /r,R = 1 500 r /min,D1 = 140 mm,D2 = 115 mm,D3 = 90 mm,经计算可得,举 升油缸各级活塞运动速度 V1 = 16. 65
9、mm /s,V2 = 24. 67 mm /s,V3 = 40. 28 mm /s。1. 2举升机构载重平台运动分析举升机构载重平台运动可分解为竖直方向和水 平方向4,其速度分别记为 VNY 和 VNX ( 见图 2) 。通 过计算可得举升油缸活塞杆轴向运动速度 V1 与载 重平台竖直运动速度 VNY 之间的关系,即(b2+ L2 + 2bLcos( 2)sin() +V= V1NY122Lcos( L22La) sin2 + a2sin3 )( 2)2Lcos将举升油缸活塞轴向运动速度参数代入式 ( 2) ,即可得到举升机构载重平台竖直运动速度 V2与举升机构角度 之间的关系如图 3 所示。
10、图 4载重平台水平运动速度与举升机构角度 关系经现场实测得到的举升机构运动速度比照关系曲线如图 5 所示。图 5举升机构运动速度比照关系实测曲线由图 5 可知,实测速度曲线与仿真曲线形状较好地吻合( 误差源于测量装置) ,说明了上述运动分析的正确性。 由于采用多级油缸,在机构举升过程中,从低一级油缸向高一级油缸切换时,会造成载重平台运动 速度的突变,即图 3 图 5 中曲线所示的跃变。第 6 期胥 军等: 剪叉式升降机举升机构分析与优化9212 举升机构力学分析在举升运动过程中,举升机构主要依靠举升油建立剪叉式升降机举升机构力学分析模型如图缸推力竖直方向分力克制台面载荷,因此 值的大6 所示。
11、小与举升油缸推力有着直接的关系。当 90 时,随着 值的增大,举升油缸推力逐步下降; 当 90 时,随着 值的增大,举升油缸推力逐步上升。通过计算,建立铰接点 C、D 所受合力、 角度值随举升机构角度 变化曲线如图 8 和图 9 所示。图 6举升机构力学分析模型参照图 6,依据虚位移原理5,6,可得( a b) 2+ ( L2 + 2Lb 2La) sin2 F =2( L2+ 2Lb 2La) sinLG( 4) 式中: F 为单个举升油缸推力; G 为举升机构台面载 荷; L 为剪叉杆两端轴销孔中心连线长度; a 为油缸IJ 上安装点与剪叉杆 DH 左轴销孔距离; b 为油缸 IJ下安装点
12、与剪叉杆 AE 左轴销孔距离; 为各个剪叉 杆与水平线夹角。根据该式,可求得整个举升过程中任意时刻举升油缸的推力。以底层剪叉杆组为研究对象,其受力分析如图7 所示。对于底层剪叉杆组,局部铰接点的受力方向暂时无法确定,因此可以将其分解为沿剪叉杆方向分力和垂直剪叉杆方向分力。图 7底层剪叉杆组受力分析示意定义 FA 、FB 、FC 、FD 、FE 分别为铰接点 A、B、C、 D、E 所受合力; FC1 、FD1 、FE1 分别为铰接点 C、D、E 沿 剪叉杆方向分力; FC2 、FD2 、FE2 分别为铰接点 C、D、E 垂直剪叉杆方向分力; 为下部举升油缸主轴线与 水平线夹角; 为下部举升油缸主
13、轴线与垂直剪叉图 8铰接点 C、D 所受合力与举升机构角度 关系图 9夹角 值与举升机构角度 关系通过分析比照可知,在举升机构运动过程中,铰接点 C、D、E 所受合力随着 的增大而逐渐减小,最大合力出现在举升机构运动初始位置,铰接点 D、E所受合力大小相等,方向不同,铰接点 C 所受合力远大于其他铰接点。3 举升结构优化设计由于底层剪叉杆受力最大,因此在机构力学与 运动学分析的根底上,首先对底层剪叉杆的强度进 行校核,然后再对油箱的安装位置进展分析。3. 1剪叉杆强度校核对底层剪叉杆组进展分析可知,剪叉杆 AE 最大弯矩将出现在举升机构运动初始位置,在该工况下,剪叉杆 AE 受力分析示意如图
14、10 所示。图 10剪叉杆 AE 受力分析示意图杆方向夹角。922机 械 科 学 与 技 术第 32 卷局部铰接点受力大小如表 1 所示。表 1局部铰接点受力分解结果( 单位: kN)FE1FE2FL1FL2FJ1FJ228. 1442. 1923. 7375. 6523. 7375. 65剪叉杆 AE 弯矩、拉( 压) 力图分别如图 11、图12 所示。3. 2举升油缸安装位置优化对于剪叉式举升机构,在机构恒速运动的情况 下,主要考虑其静载荷,当载荷给定时,最大推力7,Fmax 决定工作动力性能 利用 MATLAB 软件对关 键位置参数进展优化,降低最大推力 Fmax 。建立优 化目标函数为
15、L ( a b) 2+ ( L2 + 2Lb 2La) sin2 minF =2( L2+ 2Lb 2La) sinG( 7)建立约束条件: 0 a1 300,0 b 130, = 0. 131,L = 2 600,G = 135 000。经屡次牛顿法迭代, 目标函数趋于收敛,最终确定其最优参数值: a = 302 mm,b = 348 mm。优化后,绘制优化前后举升油缸推力 F 与举升机构角度 之间关系比照曲线如图 13、图 14 所示。图 11剪叉杆 AE 弯矩图图 12剪叉杆 AE 拉( 压) 力图在图 11 中: MJ= 13 384. 33 N m; MC =24 589. 8 Nm
16、;ML= 10 580. 48 N m; FJ = 4408.63 N; FC = 28 142. 95 N; FE = 23 656 N。在 = 0.131 rad 工况状态下,剪叉杆 AE 最大弯矩、最大压力均出现在铰接点 C 处,据此可求得该处最大弯曲应力 1 、拉应力 2 ,计算公式为= M Y; =F( 5)12IA式中: M 为所求截面处的弯矩; Y 为截面上欲求应力 点至中性轴的距离; I 为截面对中性轴的惯性矩; A为截面面积。将参数代入上式,可得 1 = 106. 62 MPa,2 = 6. 21 MPa; 合成应力 = 106. 80 MPa; 此处平安 系数 n = 2,
17、Q345B 的屈服极限 s = 345 MPa,可得= 106. 8 =s= 172. 5 MPa ( 6)n可见剪叉杆 AE 满足强度要求,存在较大强度富余,可进展进一步优化处理,减少举升机构整体重量。图 13升油缸推力 F 与举升机构角度 关系比照图 14优化前后夹角 值与举升机构角度 比照综合图 13 和图 14 分析可知,优化后举升油缸最大推力 F1max = 66. 92 kN,最小推力 F1min = 66. 36 kN,最小推力较最大推力仅下降 0. 083% ,举升油缸推力变化曲线更为平稳,根本保持不变,大幅提升了该举升机构的运行稳定性。此外,优化设计前 Fmax = 79.
18、29 kN,优化后 F1max = 66. 92 kN,举升 油缸最大推力下降了 15. 6% 。( 下转第 927 页)第 6 期志贤等: 飞机结构紧固件柔度影响因素分析927而在过盈量增加到 0. 04 以后,紧固件柔度值趋于稳定,减小为无过盈配合时的 75% 。图 8不同过盈量对应的紧固件柔度4 结论1) dhead / d 值越小,铆钉柔度值越大,铆钉头形 状在 dhead / d 1. 6 时,其值越小对铆钉柔度影响越 大,在实际中遇到此类情况要给予修正,在其值大于1. 6 以后其影响变小,可以忽略。2) 埋头铆钉柔度值相对于扁圆头铆钉增大约9. 01% ,十字槽埋头螺栓柔度值相对于
19、扁圆头铆钉增大约 10. 5% 。3) 过盈配合使紧固件柔度值减小,在过盈量增加到 0. 04 以后,紧固件柔度值稳定在无过盈配合时的 75% 。参考文献1 民机结构耐久性与损伤容限设计手册 疲劳设计与分析M : 航空工业,20032 雪惠,陆富梅,光权 双向受载双向铆接加筋裂纹板的应 力强度因子J 西北工业大学学报,1994,12( 2) : 169 1773 殷之平,黄其青,贾亮 双排交织铆钉连接对接结构裂纹尖端 应力强度因子分析J 机械科学与技术,2006,25 ( 11) : 131113144 贾亮,黄其青,殷之平 含裂铆接搭接板应力强度因子分析方 法J 机械强度,2004,26(
20、4) : 439 4425 Morris G Defining a Standard Formula and Test Method for Fastener Flexibility in Lap-jointsD Delft University of Tech-nology The Netherland,April 19,20046 Huth H Influence of Fastener Flexibility on the Prediction of Load Transfer and Fatigue Life for Multiple-row JointsMIn Fatigue in
21、Mechanically Fastened Composite and Metallic Joints; American Society for Testing and Materials Special Techni-cal Publications,1986: 221 2507 庄茁等 基于 ABAQUS 的有限元分析和应用M : 清华 大学,20098The United States Department of Defense Military HandbookMMetallic Materials and Elements for Aerospace Vehicle Structu
22、res,July,2003( 上接第 922 页)4结论对一种常见的剪叉式升降机举升机构进展了运 动学分析和力学分析,并实现了其关键结构参数的校核与优化。通过对具体实例的分析计算,获得了减轻剪叉杆重量、修改举升油缸安装位置的优化方案。优化后的方案经现场实测验证,不仅大幅降低了系统的对油缸推力要求,还提高了液压系统的驱动效率,取得了良好的实效。参考文献1 齐文虎 液压缸双梁铰接式剪叉升降平台布置方式优化设计 D 理工大学,20112 於又玲,明春,曾志钢等 剪叉式升降机液压系统的设计J 液压与气动,2008,(11) : 25 273 光旭,袁端才 液压剪叉式升降台的动力学仿真J 系统仿 真学报
23、,2010,22( 11) : 2650 26534宋耀军 液压缸驱动的剪刀撑结构运动及动力学分析J 起重运输机械,2004,(2) : 41435介民 剪叉式升降机构液压缸驱动力计算J 工程机械,1990,(12) : 18226Trauis LangbeckerKinematic analysis of deployable scissor struc-turesJ International Journal of Space Structures ( S0266-3511) ,1999,14( 1) : 1157 宏光 剪叉式升降平台建模及关键参数研究J 机电工程 技术,2005,34( 7) : 20 22
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
