 PID本体说明
PID本体说明

《PID本体说明》由会员分享,可在线阅读,更多相关《PID本体说明(5页珍藏版)》请在装配图网上搜索。
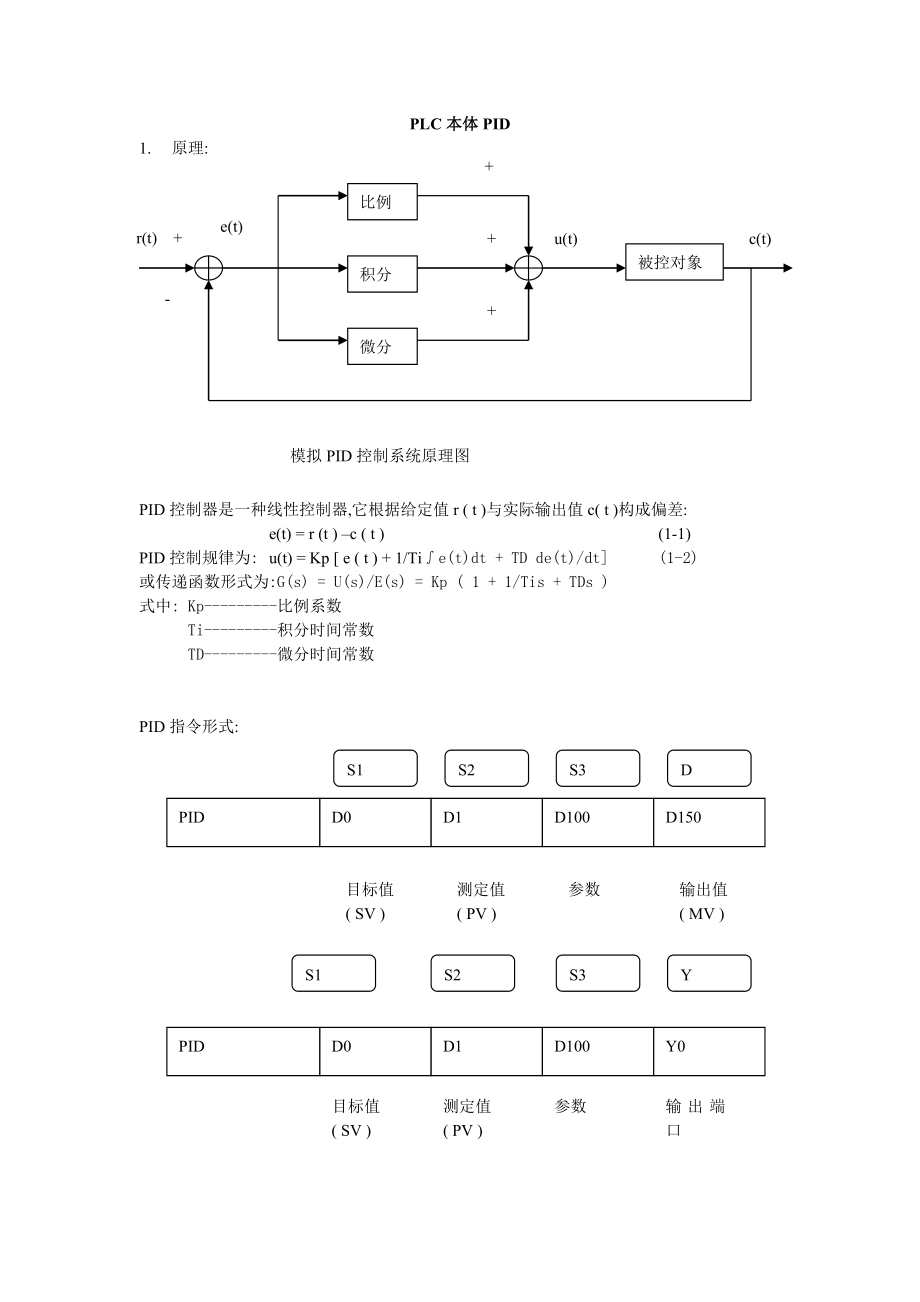
1、PLC本体PID比例被控对象积分微分r(t) +- e(t)+u(t)c(t)1.原理:模拟PID控制系统原理图PID控制器是一种线性控制器,它根据给定值r ( t )与实际输出值c( t )构成偏差:e(t) = r (t ) c ( t )(1-1)PID控制规律为:u(t) = Kp e ( t ) + 1/Tie(t)dt + TD de(t)/dt(1-2)或传递函数形式为:G(s) = U(s)/E(s) = Kp ( 1 + 1/Tis + TDs )式中: Kp-比例系数 Ti-积分时间常数 TD-微分时间常数PID指令形式:DS3S2S1PIDD0D1D100D150输出值(
2、 MV )测定值( PV )目标值( SV )参数YS3S2S1PIDD0D1D100Y0输出端口( MV )参数测定值( PV )目标值( SV )S1-设定目标值( SV )S2-测定值( PV)S3S3+4-设定控制参数D-运算结果MV的存储位置Y-运算结果输出端口参数设定:S3采样时间(32位无符号数)单位ms(32位无符号数)S3+1采样时间(32位无符号数)S3+2模式设置bit0: 0负动作1正动作bit1bit6 不可使用bit7: 0手动PID1自整定PIDbit8bit14 不可使用bit15: 0 普通模式 1高级模式S3+3比例增益(Kp)132767%S3+4积分时间
3、(TI)032767*100ms0时作为无积分处理S3+5微分时间( TD)032767*10ms0时无微分处理S3+6PID限制带值032767S3+7死区032767S3+8PID超调允许设置0:允许超调1:不超调(尽量减少超调)S3+9不超调时,目标值每次调整的比例 (高8位分子,低8位分母)S3+10不超调时,测量值在当前目标值停留的次数S3+11自整定时,系统标准测量单位1个单位值对应的AD值(PID运算的内部处理占用)S3+12PID状态位S3+13PID输出的最大值S3+14PID输出的最小值S3+15上次采样时间S3+16距离上次PID运算的时间间隔(32位无符号数)S3+17
4、距离上次PID运算的时间间隔(32位无符号数)S3+18PID当前目标值(限制超调时使用)S3+19允许刷新当前目标值标志S3+20采样值停留在目标值的次数S3+21PID运算范围的最大值S3+22PID运算范围的最小值S3+23端子台ON的时间(32位无符号数)S3+24端子台ON的时间(32位无符号数)S3+25上次采样值(实际运算的) (float)Pvnf-1 S3+26上次采样值(实际运算的) (float)Pvnf-1 S3+27上一次偏差(float)e(k-1) S3+28上一次偏差(float)e(k-1)S3+29上一次微分项的值(float)S3+30上一次微分项的值(f
5、loat)S3+31上一次的UD值(floatS3+32上一次的UD值(float)S3+33上一次的控制量输出值(float)u(k-1)S3+34上一次的控制量输出值(float)u(k-1)S3+18用户设置的扫描时间(32位无符号数)S3+19用户设置的扫描时间(32位无符号数)S3+20PID自整定的状态S3+21自整定持续时间(32位无符号数)S3+22自整定持续时间(32位无符号数)S3+23自整定周期(32位无符号数)S3+24自整定周期(32位无符号数)S3+25拐点采样值变化(32位有符号数)S3+26拐点采样值变化(32位有符号数)S3+27拐点采样周期(32位无符号数)
6、S3+28拐点采样周期(32位无符号数)S3+29自整定开始到拐点的时间(32位无符号数)S3+30自整定开始到拐点的时间(32位无符号数)S3+31上一次的输出值S3+32拐点的输出值(32位无符号数)S3+33起始时的采样值S3+34同一个拐点持续时间S3+35无用时间(低16位)S3+36无用时间(高16位)S3+37停止温度S3+38已经得到第一个拐点标志(以下为高级PID模式设置才有)S3+39输入滤波常数(a)099%0时没有输入滤波S3+40微分增益( KD)0100%0时无微分增益S3+41输出上限设定值 -3276732767S3+42输出下限设定值 -3276732767正
7、动作随着测定值PV的增加操作输出值MV随之增加的动作 正动作一般用于冷却控制 逆动作随着测定值PV的增加操作输出值MV反而减少的动作 逆动作一般用于加热控制 用户可使用模式分为:普通和高级2种.普通模式:使用参数寄存器的范围为:S3S3+42,其中S3S3+11需要用户设置; S3+12S3+34为系统所占用,用户不可以使用.高级模式:使用参数寄存器的范围为: S3S3+42,其中S3S3+11和S3+39S3+42需要用户设置; S3+12S3+38为系统所占用,用户不可以使用.S3+8设置为1时,自整定过程限制超调,如果响应曲线拐点大于计算得到的停止温度,此时就会出现超调现象,并且整定得到
8、参数非最佳参数,此时有必要选用高级模式并且调整输出最大值的设定;当S3+8设置为0时,能整出理想的PID参数,但是可能会出现超调,PID会在拐点之后的第6个扫描周期停自整定,一般会产生较大的超调.S3+9 仅在S3+8设置为1时起作用, S3+9的低16位表示分母;高16位表示分子(并且分母分子),其数值标志采样值到达当前目标值时,下一目标值的增量S3+10 一般情况下不用设置,除非为了加快PID响应速度或者有超调的情况下使用S3+11 自整定时设置该为,设置为1个单位的值对应的AD值(如:1度对应AD43,则设43),默认值是10. 注意:1) 自整定PID得到参数以后根据模式设置位(S3+
9、2的bit15),转化成相应模式的PID(普通或者高级)进行PID运算.2) 在自整定的起始的时候,用户可以预先手动设置PID的周期,也可以让其在PID自整定过程中得到.3) 默认情况下输出PID运算结果的范围为0 4095, 用户可以通过(S3+40 和 S3+41 )来改变这个范围,(通过改变这两个值:可以实现改变PID运算的位数)4) 输出下限的值必须小于输出上限的值,否则采用默认的上下限输出(0 4095 )5) 默认情况下S3+10的值是15,用户一般不需要调整此值在不影响PID整定效果的前提下,把PID扫描周期设的越大,效果就越好.如果PID不允许超调(S3+8=1)并且目标值每次调整的比例为2/3(S3+9=0X23)此时当前目标温度调整情况如下图所示:例:(如果系统的初始温度为0度,目标温度为100度,则系统的当前目标值变化顺序为66度,88度96度,98度, 99度,100度)计算公式为: 下一个当前目标值=当前目标值+(最终目标值-当前目标值)*2/3 ;当前系统值目标值当前目标值1当前目标值2当前目标值3
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
