 专题检测11简单机械
专题检测11简单机械

《专题检测11简单机械》由会员分享,可在线阅读,更多相关《专题检测11简单机械(11页珍藏版)》请在装配图网上搜索。
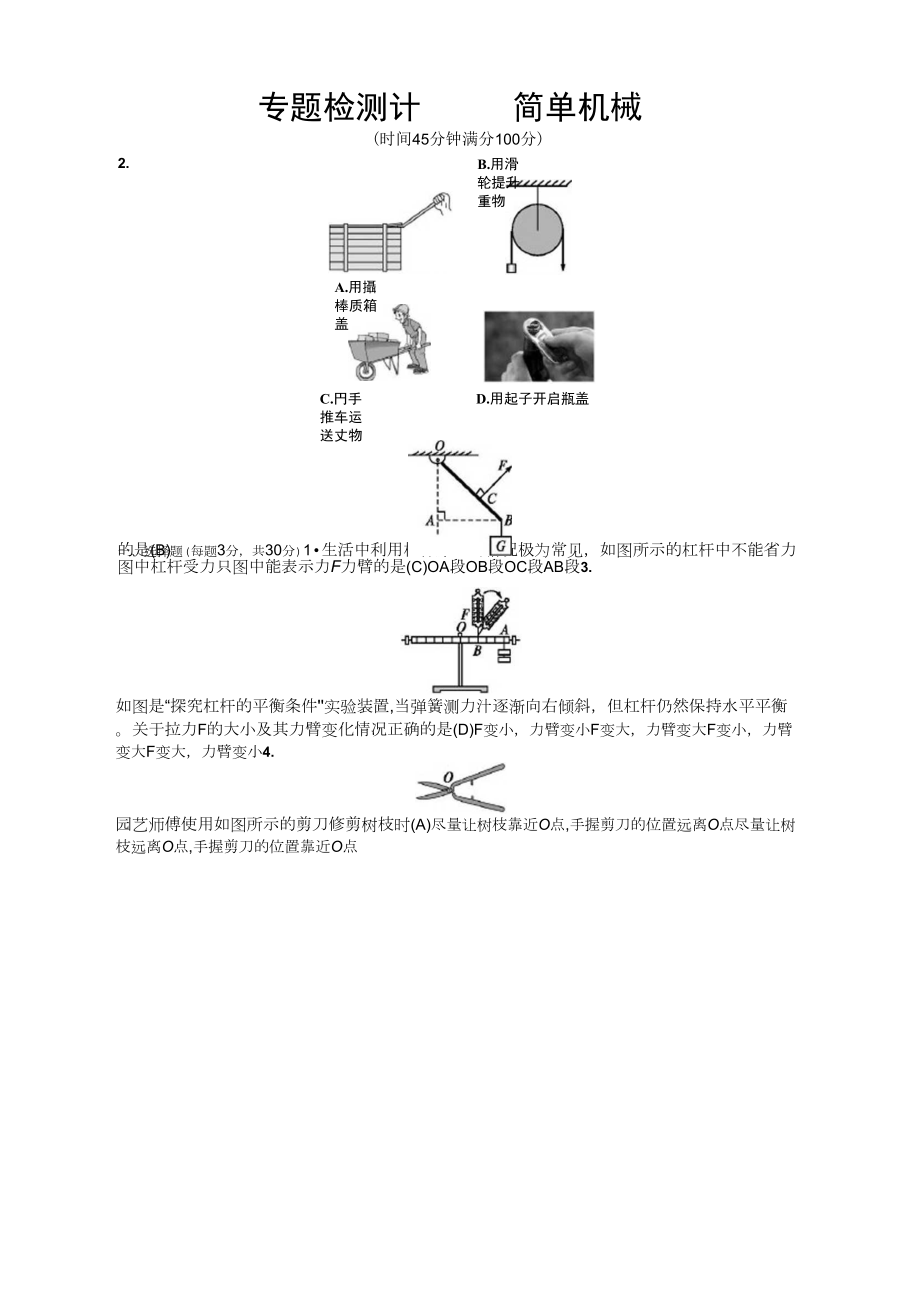
1、专题检测计简单机械(时间45分钟满分100分)一、选择题(每题3分,共30分)1生活中利用杠杆原理的情况极为常见,如图所示的杠杆中不能省力的是(B)2.A.用攝棒质箱盖C.円手推车运送丈物B.用滑轮提升重物D.用起子开启瓶盖图中杠杆受力只图中能表示力F力臂的是(C)OA段OB段OC段AB段3.如图是“探究杠杆的平衡条件实验装置,当弹簧测力汁逐渐向右倾斜,但杠杆仍然保持水平平衡。关于拉力F的大小及其力臂变化情况正确的是(D)F变小,力臂变小F变大,力臂变大F变小,力臂变大F变大,力臂变小4.园艺师傅使用如图所示的剪刀修剪树枝时(A)尽量让树枝靠近O点,手握剪刀的位置远离O点尽量让树枝远离O点,手
2、握剪刀的位置靠近O点C树枝和手离0点的距离无论远近,修剪树枝时都费力D.树枝和手离O点的距离无论远近,修剪树枝时都省力5.自行车是一种轻便、利于环保的交通工具,从它的结构和使用来看,用到了许多物理知识,下列说法正确的是(C)为了减小摩擦,轮胎上制有花纹为了骑行省力,链条与其连接的两个齿轮组成滑轮组C车把上的手闸刹车系统是应用了省力杠杆及摩擦的知识D.晚上灯光照在自行车尾部,尾灯会发光这是利用了光的折射原理6如图所示,弹簧测力计和细线的重力不计,一切摩擦不计,重物的重力G=10N,则禅簧测力讣A和B的读数分别为(B)A.10N.20NB.10N,10NC. 10N.0D.0,07.(2017山东
3、徳州)如图所示的滑轮组中,动滑轮重1N小强用6N的拉力F通过该滑轮组匀速拉起重10N的物体,物体沿竖直方向上升0.4m。此过程中,额外功和机械效率分别是(C)A. 0.4JB. 0.8JC. 0.8JD. 0.4J83.3%91.7%83.3%91.7%8如图所示,张伟同学通过斜而用平行于斜而F=200N的推力,将质量为30kg的物体在5s时间内匀速推到1m髙的平台上,斜面长5=2nio(g取10N/kg)则(B)推力的功率为40W斜而的机械效率为75%推力做的总功为300J斜而对物体的摩擦力为100N9.(多选)fl在探究杠杆平衡条件的时候,小明在均匀木板中间挖孔,孔中插一金属杆,固左在铁架
4、台上,木板可以用绕中间自由转动。每个钩码的质量为200g、B、C、D、E、F为挂钩,已知AB=BO=OC=CDABOCD的连线与EDF的连线垂直。现在B处挂两个钩码,D处挂一个钩码,木板在水平位巻平衡(如图所示)。下列做法能使木板重新平衡的是(BCD)在B、D两处各加挂一个钩码在B处加挂两个钩码、处加挂一个钩码B处挂两个钩码不变,把D处的一个钩码挂在E处B处挂两个钩码不变,把D处的一个钩码挂在F处10.侈选)建筑工地上需要将6块相同的砖从地而运送到楼顶,工人师傅利用如图所示的装置,分三次运。第一次运1块,第二次运2块,第三次运3块,每次运送时,砖都匀速上升,绳重及摩擦均忽略不计,这三次拉力依次
5、为F、F2、凡,效率为I、2、3侧(BD)AF十F?=F、B.Fj+F2F3C+2=3D./2Z/3二、填空题(每空2分,共18分)1L如图是同学们常用的燕尾夹AB=BC,当用力扌恩住C点打开该夹子时,可把g点看作支点,此时夹子可近似看作羞置(选填“省力以费力或“等臂)杠杆。第11题图12如图所示,小明正在做俯卧撑,把他的身体看作一个杠杆Q为支点川为重心,他的体重为600No地而对手的支持力F的力臂是1.5m,力F的大小为360N。13在水平而上放一个200N的重物,现用如图所示装置将物体匀速拉动,物体与水平而的摩擦力是48N,不考虑滑轮重力和滑轮与绳间摩擦,水平拉力F为6NO若绳子自由端移动
6、速度为0.9m/s,则物体移动速度为.3ni/s.(2017山东烟台)往车上装重物时,常常用长木板搭个斜面,把重物沿斜而推上去,如图所示,工人用3m长的斜面,把120kg的重物提高1m,假设斜而很光滑,则需要施加的推力为400N,若实际用力为500N,斜而的机械效率为80%,重物受到的摩擦力为lOONo(g取10N/kg)三、作图题(本题共6分)(4分)“节约用水,人人有责。“如图甲是用水后及时关闭水龙头时的情景,水龙头手柄看作是一个杠杆,请你在图乙所示的示意图中画出阻力臂厶2,并画出施加在A点的最小动力F及答案如图所示14. (2分)请在图中画岀人拉重物上升,最省力的绕线方法。答案如图所示1
7、5. 四、实验探究题(本题共22分)(12分)在探究杠杆平衡条件啲实验中:(1)让杠杆在水平位豊平衡的目的是便于测量力臂大小。(2)杠杆平衡后,小英同学在图甲所示的A位置挂上两个钩码,可在B位宜挂上工个钩码,使杠杆在水平位宜平衡。(3)取下B位置的钩码,改用弹簧测力计拉杠杆的C点,当弹簧测力汁由位宜1转至位巻2的过程中.杠杆在水平位置始终保持平衡(如图乙).测力计示数如何变化:先变小E变大。在探究过程中,我们需要测量和记录动力、动力臂、阻力,阻力臂四个物理量,在进行多次实验的过程中,我们可以(选填“可以或不可以“)同时改变多个量,进行探究测呈:。(5)完成实验后,小英利用杠杆的平衡条件来测量杠
8、杆的质量。佛以杠杆上的B位置为支点,在B的右侧挂质量为加的钩码,左右移动钩码的位苣,使杠杆在水平位置平衡(如图丙)。 用刻度尺测岀此时钩码悬挂位宜E到B的距离Li和0到B的距离Li.16. 根据杠杆的平衡条件,可以计算出杠杆的质量m尸讐用题目中所给物理量表示)导学号86244267(10分)某小组同学在探究滑轮组的机械效率与哪些因素有关时,提出了一些猜想并对猜想进行验证。图1图2图3图4(1)如果影响机械效率的因素有A、B、C三个,要研究其与B因素的关系,需要先控制其他几个因素不变,而改变E因素,从而进行研究。(2)下列是A、B同学提出的两个猜想:猜想一:两个相同滑轮组成的滑轮组,英机械效率与
9、滑轮组细线的绕法有关。猜想二:两个相同滑轮组成的滑轮组,英机械效率与滑轮组提升的物体的重力有关。为了验证上述猜想是否正确,同学们准备分別按图1、图2、图3和图4的滑轮组进行实验。验证猜想一的小组应按图1、3或2、4所示的两个滑轮组进行实验:若实验测得两滑轮组的机械效率大小蛀(选填“相等或“不相等),则可初步判断猜想一是错误的。验证猎想二的小组应按图1、2或3、4所示的两个滑轮组进行实验:若实验测得两滑轮组的机械效率大小不相等,则可初步判断猜想二是整(选填“正确或“错误“)的。(3)请你为该班同学提出一种提高滑轮组机械效率的方法:尽量让滑轮纽满负荷工作(提升可以提升的爺大物玄)、在转轴上加润滑油
10、、滅轻动滑轮的自重等。导学号86244268五、计算题(本题共24分)19.(6分)在一次车辆故障处置过程中,拖车所用装置简化如图。为了尽快疏通道路,交警只用了30s的时间,指挥拖车在水平路而上将质量是1.5t的故障车匀速拖离了现场。若故障车被拖离的速度是6m/s縄子自由端的拉力F是500N,该装宜的机械效率是80%o求:(1)故障车在30s内通过的路程;拉力F在30s内所做的功;(3)故障车在被拖离过程中受到的阻力。答案(1)180m(2)2.7xl05J(3)1200N解析由V#得故障车在30s内通过的路程s4=v/=6ni/sx30s=180m(2) 由题图可知山=3,绳子自由端移动的距
11、离s纯=3$4=3x180m=540m拉力F在30s内所做的功V=Fs=5OONx54Om=2.7xlO5J由题图知,“=3,水平滑轮组的机械效率有_心车_车_f%“绳FX3讣3F所以故障车在被拖离过程中受到的阻力3F;/=3x5OONx8O%=12OON|导学号8624426920.(6分)某工人用如图所示的装宜把一重为1200N的箱子从斜面底端匀速拉到顶端用时10s,已知斜而长6m、髙2m,此装置的机械效率为80%(滑轮重、绳重、滑轮与绳之间的摩擦均不计)。求:拉力F;拉力F做功的功率;(3)箱子和斜而间的摩擦力。答案(l)250N(2)3OOW(3)100N解析(1)由题图可知滑轮装置是
12、一个动滑轮,绳端移动的距离5=2T=2x6m=12m有用功VV1200Nx2m=2400J根据仟护=普可得y=丽晶評50N(1) 拉力做的功W尸Ff=25ONxl2m=3OOOJ拉力的功率P=-=欝l=300Wt10s(2) 因为所以克服摩擦力做的额外功W宾尸3000J2400J=600J根据W=fs可得,摩擦力戶罕=豐=100N导学号86244270(12分)如图所示,用滑轮组提升水中的物体人若物体的质量为140kg,体积为60dg滑轮组的机械效率为80%,g取10N/kg,不计绳重及轮与轴的摩擦,求:(1) 物体A在水中被匀速提升时,拉力F是多大?如果动滑轮挂钩用钢丝绳(假设不会断)与物体
13、A相连,而连接滑轮组的绳子所能承受的最大拉力为350M当物体露出水的体积多大时绳子会断?此时物体A受到的浮力是多少?答案(l)250N(2)4xl02m3200N解析由題意可知绳子股数是4物体重力G=mg=140kgx10N/kg=1400N,物体体积V场=60dm3=0.06m3(1)物体A浸没在水中,受到了水对它施加的竖直向上的浮力,为g=l.Ox103kg/m3x0.06m3x10N/kg=600N由此公式可得F二此时机械效率/=140QN-600N4x80%=250N(2)由F=-(G-Fi+G小得G=4x250N-1400N+600N=200Nn滑轮组绳索能承受到最大拉力F=35ON
14、.设物体鎔出水面部分体积为V並则有F=Gpg(V-V)+G则“F+p粘(/VQ=G+G切代入数据得4x350N+1x103kg/m3x10N/kgx(0.06m3-V)=1400N+200N解得1=4xl02m3此时排开液体的体积V4Vw-V=0.06m3-0.04m3=0.02m3此时物体A受到的浮力是F*=pVMr=1x103kg/m3x10N/kgx0.02n?=200N导学号86244271#专题检测十一简单机械1. B用撬棒撬箱盖时,动力臂大于阻力臂,是省力杠杆,A不合题意;用滑轮提升重物时,题图中是定滑轮,相当于等臂杠杆,不省力也不费力.B符合題意;用手推车运送重物时,动力骨大于阻
15、力臂,是省力杠杆,C不合题意;用起子开启瓶盖时,动力嘴大于阻力臂,是省力杠杆,D不合題意。2. C3. D由题图可知*点的钩码重力不变,且A点的力臂为OA不变;弹簧测力计竖直向上拉杠杆时,拉力力臂为03.弹簧测力计倾斜拉杠杆,拉力的力臂小于03.即拉力的力臂变小,由GaxOA=FxL可知GixOA的乘积不变,乙变小时,所以拉力F变大。4. A尽量让树枝亲近O点,手握剪刀的位置远离O点,阻力不变,减小了阻力臂,增大了动力臂,根据杠杆平衡条件可知省力,故A正确,C错误;尽量让树枝远离O点、,手握剪刀的位置靠近O点、,阻力不变,增大了阻力臂,减小了动力臂,根据杠杆平衡条件可知费力,故B、D错误。5.
16、 C轮胎上制有花纹,是为了在压力一定时,通过增大接触面的粗糙程度来增大摩擦力,故A错误。后轮是主动轮,用链条带动前轮转动,前治齿轮不是滑轮组,也不是为了省力,故B错误。刹车时动力臂大于阻力嘴,属于省力杠杆;同时也是在接触面粗糙程度一定时,通过杠杆增大了车闸和车圈之间的压力,增大了摩擦力,故C正确。自行车的尾灯是利用光的及射原理工作的,射向自行车尾灯的光线经尾灯反射后进入司机的眼睛,避免交通事故的发生,故D错误。6. B弾簧测力计A受到向右10N的拉力,保持赫止,向左受的拉力也是10N,则弹簧测力计A的读数为1ON;同理,弹簧测力计B两端受的力都是1ON,仍然保持静止,则弹黄测力计B的读数也为l
17、ONo7. C由题图知,二2,拉力端移动距离y=2/i=2x0.4m=0.8nz.W.4=F5=6Nx0.8=4.8J.VV,n=G/?=10Nx0.4m=4JJV=lVlVr=4.8J-4J=0.8J;滑轮组的机械效率?/=-7x100%=jx100%83.3%&B总功VV=F.y=200Nx2m=400J.推力的功率P=譽=80W.故A、C错误;tDS有用功vv处的一个钩码挂在E处或F处,杠杆右侧的力臂不变,仍为OQ长,杠杆左右两侧力与力臂的乘积相等,所以木板会平衡,故C、D正确。10. BD根据题图可知,作用在动滑轮上绳子的股数为2;设一块砖的重力为G,则由F=iG+G幼)可得,=Ug+
18、GF2=ii(3G+G”);因此FX+F2F故A错误,B正确。由二加=*=斗可得,绳重及摩擦均忽略不计动滑轮的重力一定,物体重”总Fs2FG+G动力越大,滑轮组的机械效率越大,即/lZ/2/3,故C错误,D正确。U.B等臂解析当用力想住C点打开该央子时ec是围绕3点转动的,故B为支点;由于AB二BC,故动力臂等于阻力臂,为等臂杠杆。12.1.5360解析由题图可知Q为支点,地面对手的支持力的力臂L=0.6m+0.9m=1.5m;由杠杆平衡条件得FL二GS许Fxl.5m=6OONxO.9m,解得F=360N。13.1603m/s解析由题图知,“二3,不考虑涝轮重力和滑轮与绳间摩擦,水平拉力F二扣
19、x48N二16N;因为拉力端移动的距离等于物体移动距离的3倍,时间相同,所以由pg可知拉力端移动的速度等于物体移动速度的3倍,所以物体移动速度vtt=|v=x0.9m/s=0.3m/so14.400N80%100N解析wkG/?二诃匸120kgx10N/kgxlm=1200J;斜面很光泳故利用功的原理得,人做的有用功等于用斜面所做的功故泸:1200J,解得F二骅二400N。人所做的总功VV3m=F=500Nx3m=1500Jo斜面的机械效率二二=醫二80%。W尸W方卄危W讥1DUUJ所以/=POO;2OOJ二00N。15如图所示解析过O点作阻力尺的垂线,即为阻力尸2对支点o的力臂厶2。动力最小
20、*卩动力臂最长,阻力的方向已标出,所以动力的方向应该向下。连接支点O与A点,过A点作OA的垂线就得到在A点施加的最小动力FOA即为动力臂厶。16如图所示解析因为人站在鬲处,人拉重物上升,从动滑轮的挂钩开始依次绕绳子,最后有三段绳子承担物重,这就是最省力的绕法。17.(1)便于测量:力臂大小(2)3(3)先变小后变大(4)可以(5)0到B譽解析探究杠杆平衡条件时,使杠杆在水平位置平衡的目的是:力臂在杠杆上,方便测出力臂大小。设杠杆的一个小格为厶一个钩码重为G,因为Fh二FJx所以2Gx3L=nGx2L,所以”二3,所以在A处挂3个钩码。(3)由題图可知,OC为最长力臂,当弹黄测力计由位置1转至位
21、置2的过程中,动力臂先变长后变短,而杠杆在水平位置始终保持平衡,根据杠杆平衡条件可知,测力计示数将先变小后变大。在“探究杠杆平衡条件实验时,不断改变动力(臂)和阻力(臂),多次测量的目的是:避免实验次数过少,导致实验结论具有偶然性,便于从中寻找规律。已知钩码的质量加.用刻度尺测出此时钩码悬挂位置E到B的距离,即厶,欲求杠杆的质量m旳则应量出O到B的距离,即2,然后根据杠杆平衡条件FL=F2L2可得jnL=m厶2,则m刖二片如。l218. (1)B(2)1、3或2、4相等1、2或3、4正确(3)尽量让滑轮组满负荷工作(提升可以提升的最大物重)、在转轴上加润滑油、减轻动滑轮的口重等解析要研究其与B
22、因素的关系,就要控制其他量即A、C不变,改变反(2)要探究滑轮组的机械效率与滑轮组细线的绕法是否有关,需要保持滑轮数目、规格,提起物体的重力相同,所以选择的是题图1、3或图2、4;若实验测得两个滑轮组的机械效率大小相等,说明机械效率与绕线方法无关,可初步判斷猗想一是错误的;要探究滑轮组的机械效率与滑轮组提升的物体的重力是否有关,需要保持滑轮数目、规格,绕线方法相同,所以选择的是题图1、2或3、4;若实验测得两滑轮组的机械效率大小不相等,说明机械效率与物体的重力有关,可初步判断猜想是正确的。(3)要提鬲机械效率,要尽董减小额外功、増大有用功,可尽量让滑轮组满负荷工作(提升可以提升的最大物重)、在
23、转轴上加润滑油、减轻动滑轮的自重等。19. (1)180m(2)2.7xlO5J(3)1200N解析由卩斗得故障车在30s内通过的路程s*=v/=6ni/sx30s=180m(2) 由題图可知,”二3.绳子自由端移动的距离sm.=3s=3xl80m=540m拉力F在30s内所做的功W=Fsft=500Nx540m=2.7x105J(3) 由題图知,二3,水平滑轮组的机械效率所以故障车在被拖离过程中受到的阻力/=3F/=3x5OONx8O%=12OON20. (1)250N(2)300W(3)100N解析(1)由題图可知滑轮装置是一个动滑轮,绳端移动的距离L二2$二2x6m二12m有用功W订G/
24、=1200Nx2m=2400JW/(W,W.24001根据吩=普可得F=聽評50N(2) 拉力做的功=250Nx12m=3000J拉力的功率P=鬻二300Wt10s(3) 因为=所以克服摩擦力做的额外功二Wq-W方二3000J.2400J二600J根据W=fs可得,摩擦力/二=譬TN21. (1)250N(2)4x102m3200N解析由题意可知绳子股数是4,物体重力G=mg=140kgx10N/kg=1400N,物体体积V=60dm3=0.06ni3(1)物体A浸没在水中,受到了水对它施加的竖直向上的浮力,为F冷二拗g=lOx103kg/m3x0.06m3x10N/kg=600N由F=-(G.F4+CQ得G,=4F-G+F=4x250N-1400N+600N=200N滑轮组绳索能承受到最大拉力F=35ON,设物体薛出水面部分体积为心,则有fW【G-p押(VU+G胡则F+p榊(U-M參)二G+Gw代入数据得4x350N+1x103kg/m3x10N/kgx(0.06m3-V斧)二1400N+200N,解得V第=4x1OW此时排开液体的体积V#=VV=0.06m3-0.04m3=0.02m3此时物体A受到的浮力是F、p,tr=1x103kg/m3x10N/kgx0.02m3=200N
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
