 电信10单片机实验
电信10单片机实验

《电信10单片机实验》由会员分享,可在线阅读,更多相关《电信10单片机实验(24页珍藏版)》请在装配图网上搜索。
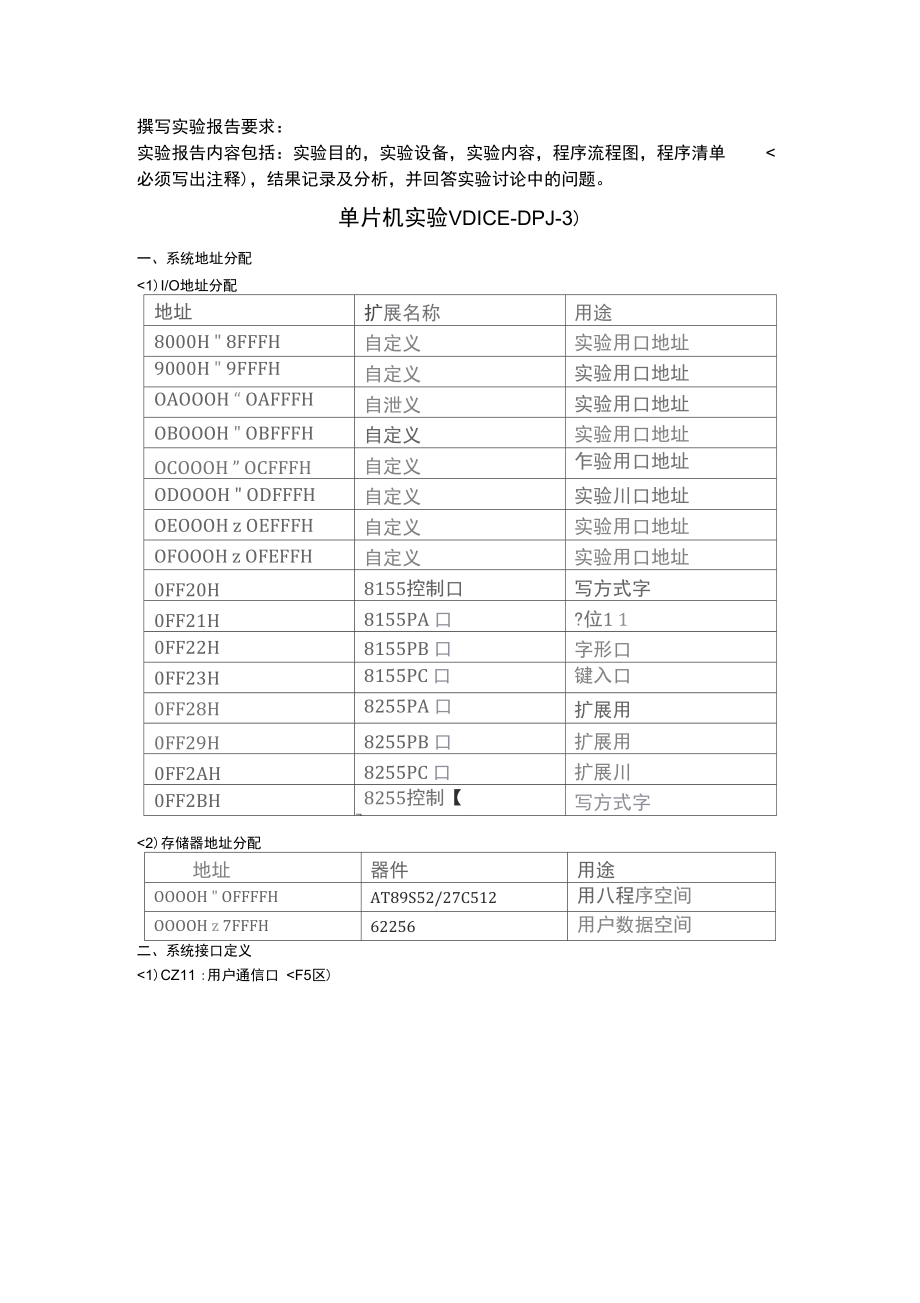
1、撰写实验报告要求:实验报告内容包括:实验目的,实验设备,实验内容,程序流程图,程序清单必须写出注释),结果记录及分析,并回答实验讨论中的问题。单片机实验VDICE-DPJ-3)一、系统地址分配1)I/O地址分配地址扩展名称用途8000H 8FFFH自定义实验用口地址9000H 9FFFH自定义实验用口地址OAOOOH “ OAFFFH自泄义实验用口地址OBOOOH OBFFFH自定义实验用口地址OCOOOH ” OCFFFH自定义乍验用口地址ODOOOH ODFFFH自定义实验川口地址OEOOOH z OEFFFH自定义实验用口地址OFOOOH z OFEFFH自定义实验用口地址0FF20H8
2、155控制口写方式字0FF21H8155PA 口?位1 10FF22H8155PB 口字形口0FF23H8155PC 口键入口0FF28H8255PA 口扩展用0FF29H8255PB 口扩展用0FF2AH8255PC 口扩展川0FF2BH8255控制【写方式字2)存储器地址分配地址器件用途OOOOH OFFFFHAT89S52/27C512用八程序空间OOOOH z 7FFFH62256用户数据空间二、系统接口定义1)CZ11 :用户通信口 7U11 /L/fcrTDB95-=2RID-TlCFC机标准率口定义2) CZ4:打印接口 gz iDktkJ) lDKtK7)1$询匡1-23) J
3、XO, JX17:为系统提供的数据总线接口E2区)3S图1-34) CZ7:系统提供的扩展接口 E2区)心沖DttsDawaDCD?图Z5) JX12、JX14:液晶显示接口 B2区)JX12JX146)DE7图1-百ISP下载接口 F1区)PL7/SCKo oGNDP1.6/WIS0o NCRSTo叵WCNCo o+5VPl. 5/M0SIo oNC1-6三、通用电路简介1) LED发光二极管输出模块E5区)实验台上有8只发光二极管及相应驱动电路。见图1-7 , L1L8为相应发光二极管驱动信号输入端,该输入端为高电平0时发光二极管亮。2)开关量输入模块E7区)实验台上有8只开关KIK8,与
4、之相对应的K1-K8个引线孔为逻辑电平输出端。开关向 上拨相应插孔输出高电平r”,向下拨相应插孔输出低电平0”见图1-8。EI-83)单脉冲电路C2区)实验仪上单脉冲产生电路如图1-9所示,两个引线插孔为正负单脉冲输出端。附近按钮AN(为单脉冲产生按钮,每按一次产生一个单脉冲。an4)分频电路C2区)RST 4QQQ2Q5)脉冲发生电路C2区)cut74LS393ML= OHZ 一一 2 HHZ 一 1MHZ 丄* BOOK 25OK-I25E* 62; 5K 3L25K圏 1-LO6OZW71图L-J6) 485接口电路C11区)TEM/R n ;120DI -263 TW(価 T4 t7)
5、数码管显示电路*i11B亠1r rir字龄弋码口位扫描口- z/L/J* o 7 A :.; A p *155 F*LnlttEs4 入入入4、 入jF 、 JF旷 h 、 f、 jT tJ td td D Ld td tr Tij“订 fQ 畑T图 1-138)矩阵键盘模块电路 IP,选择CPI内部upB厂模式),选择 CPU7卜部,此时可脱机运 行EPRO中固化的程序,也可用仿真器进行联机实验。2) SW3 SW4 SW5为键盘/显示选择开关,开关置 系统配置的8155接口芯片,反之由用户选择自定义的 8279实验外,键盘/显示为出厂模式。3) KB併关:KB1开关有两种工作模式,平时都工
6、作在一般模式”,当我们用到单片机ISP2)联机实验时,首先关闭电源,将仿真器的34芯扁平线与JF_1F1区)34芯插座相连,然后打开电源,打开DICE-51仿真开发系统注意选择正确的通讯端口)。3)进入DICE-51仿真开发系统后,点击菜单设置”-仿真模式”-四、DICE-DPJ-3C51单片机)硬件安装说明实验通过DICE-3000仿真器来连接5208K实验系统和P(M,首先用随机串行通讯电缆连 接仿真器串行口和PC机串行口,然后用随机34芯扁平线连接仿真器和 5208K实验系统的JF_1 仿真接口,将KB併关设置在 一般模式”,KB2开关用两个短路块插在1和2MCS-51)位置。从而完成实
7、验系统与 PC机的联机。五、系统开关设置F1区)1) SW1ONB厂模式),键盘/显示控制选择 I/O接口芯片控制,在本机实验中,除在线编程功能时,将 KB併关打在 编程模式”。ISP在线可编程AT89S系列单片机)。4) KB2开关 用短路块实现):为 MCS-5係统”与C8051F系统”读写信号切换开关。当 使用MCS-51系统”时,将两个短路插在 1 和2位置,使用 C8051F系统”时,将两个短路块 插在2 和3 位置。 口为系统通讯口,用于程序的仿真、连接、装载。而实验系统的 CZ11 口为用户实验通讯口,用于实验系统与PC机之间的串行口通讯实验。六、DICE-DPJ-3使用注意事项
8、1)脱机实验时,从矩阵键盘模块输入相应实验序号如实验一,输入 01 ”),再按FO/EX即可运行该实验程序。CPU 选 8031/8032RAM选用户RAMROM选系统ROM4)注意在DICE-51仿真开发系统中,新建和调用的源程序的文件名”不能含有中文字符,且英文字符不能超过 8个字符。源程序”所在的路径中同样也不能含有中文字符,且不能超过8个字符。正确例子:D:5203k52kasmhw01.asm5) SW1开关不管在脱机实验或仿真器联机实验状态时都应打在UP位置。实验一、步进电机控制实验一. 实验目的:1. 了解步进电机控制的基本原理。2. 掌握控制步进电机转动的编程方法。3. 掌握程
9、序设计方法以及如何使用仿真器排除程序错误。二. 实验设备:1. DICE-DPJ-3单片机实验仪1台2. 计算机1台3. 通信电缆1根三. 实验内容步进电机驱动原理是通过对每相线圈中的电流的顺序切换来使电机作步进式 旋转。驱动电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电 机的转速。四相步进电机的工作方式:*单相四拍工作方式,其电机控制绕组A、B C D相的正转通电顺序为:AB C D- A;反转通电顺序为:A D C BA。*四相八拍工作方式,正转的绕组通电顺序为:A A4 B BC C CDDDA A;反向的通电顺序为:A AD D DC C CB B BA A。*双四拍工作方
10、式,正转的绕组通电顺序为:A4BC CDA AB;反向的通电顺序为:A4ADDC CM BA步进电机有如下特点:给步进脉冲电机就转,不给步进脉冲电机就不转;步 进脉冲的频率越高,步进电机转得越快;改变各相的通电方式,可以改变电机 的运行方式;改变通电顺序,可以控制电机的正、反转。 本实验采用采用单相四拍工作方式,实验接线图如下图所示。HA HD HC HDrz Hl 7/ M2 L7 NS L71. 按照如下流程图编写程序,实现步进电机的控制键盘输入数据,数码管显示执行键是否按下?J Y昱示缓沖区(7E) =1吗? *逆时针转动一歩II+11页时转一歩1!根据是缓沖区(73的內谷计算延时(阿容
11、计算延时1歩距数送呈示缓神区歩距数送显示缓冲1步距数为0吗?步距数为0吗?IV2. 实验1)实验模块:DP-51单片机实验装置挂箱、DP-600模块单元挂箱2)将DP-51 CPU挂箱电源区对应直流电源插孔用双头导线与控制屏上电源连 接。3)用20芯扁平线将DP-51 和 DP-600的CZ3接口对应连接。,为1反转),第二位0F显示转速,第三六位为设定步数,如输 入“011000”,按F0/EX键后,步进电机开始转动,步数逐渐减小到零时步进电 机停止转动,参考程序如 HW19.ASM。3. 用开关量控制步进电机的转向,转速。要求:a)K0、K1控制步进电机的转向。b)K2K7控制转速,分为6
12、档。c)K0、K1中和K2K7中一开关同时为有效时,步进电机才启动,其他情况 步进电机不工作。四.实验讨论: 问题回答后,写入实验报告)1. 给HW19.ASM程序添加注释,说明各子程序所完成的功能?2. 编写并调试正向步进子程序、反向步进子程序和主程序,使步进电机转速按 图执行,不断循环。附:HW19.AS程序清单 仅供参考)ORG 0000H MOV P2,#0FFH MOV 7EH,#11H MOV 7DH,#10H MOV 7CH,#10H MOV 7BH,#10H MOV 7AH,#10H MOV 79H,#10H MOV A,#43H MOV DPTR,#0FF20H MOVX D
13、PTR,A MOVR0,#59h MOVA,#7eh MOVX r0,aDOJ0:MOV SP,#53HDOJ6:LCALL X2 。JNC DOJ5 LCALL X3 MOV R1,#7EH SJMP DOJ6DOJ5: CJNE A,#16H,DOJ6 MOV A,7AH SWAP A ORL A,79H MOV R6,AMOV A,7CH SWAP A ORL A,7BHMOV R7,AMOV A,7EHCJNE A,#00H,DOJ2DOJ1: MOV P1,#03H LCALL DEL0Y LCALL GGJ0 MOV P1,#06H LCALL DEL0Y LCALL GGJ0 M
14、OV P1,#0CH LCALL DEL0Y LCALL GGJ0 MOV P1,#09H LCALL DEL0Y LCALL GGJ0 SJMP DOJ1DOJ2:MOV P1,#09HLCALL DEL0YLCALL GGJ0MOV P1,#0CHLCALL DEL0YLCALL GGJ0MOV P1,#06HLCALL DEL0YLCALL GGJ0MOV P1,#03H LCALL DEL0YLCALL GGJ0SJMP DOJ2DEL0Y: MOV A,7DHSWAP AMOV R2,AMOV R5,#80HDEL1Y:DJNZ R5,DEL1YLCALL SSEEDJNZ R2,D
15、EL1YRETGGJ0:CJNE R7,#00H,GGJ1CJNE R6,#00H,GGJ1AJMP DOJ4GGJ1:DJNZ R6,DOJ3CJNE R7,#00H,DDJ8DOJ4:LCALL DOJ7SJMP DOJ4DDJ8:DJNZ R7,DOJ3AJMP DOJ4DOJ3:LCALL DOJ7RETDOJ7:MOV R0,#79HMOV A,R6LCALL PTDS5MOV A,R7LCALL PTDS5LCALL SSEE RETPTDS5: MOV R1,AACALL PTDS6MOV A,R1SWAP APTDS6: ANL A,#0FHMOV R0,A INC R0 RE
16、T ORG 1D00H X3: MOV R4,AMOV R0,#59H MOVX A,R0 MOV R1,A MOV A,R4 MOV R1,A CLR A POP DPH POP DPL MOVC A,A+DPTR INC DPTR CJNE A,01H,X30CLR AMOVC A,A+DPTR X31: MOVX R0,AINC DPTR PUSH DPL PUSH DPH RET X30:DEC R1MOV A,R1 SJMP X31 X2:MOV R6,#50HX0:ACALL XLEJNB ACC.5,XX0 DJNZ R6,X0 MOV R6,#20H MOV R0,#59H M
17、OVX A,R0 MOV R0,A MOV A,R0 MOV R7,A MOV A,#10HMOV R0,AX1:ACALL XLEJNB ACC.5,XX1 DJNZ R6,X1 MOV A,R7 MOV R0,A SJMP X2XX1:MOV R6,AMOV A,R7MOV R0,AMOV A,R6XX0:RETXLE:ACALL DISACALL KEYMOV R4,AX10:MOV R1,#48H MOVX A,R1 MOV R2,AINC R1MOVX A,R1MOV R3,AMOV A,R4XRL A,R3MOV R3,04HMOV R4,02H JZ X10MOV R2,#88H
18、 MOV R4,#88H DEC R4MOV A,R4XRL A,#82H JZ X11MOV A,R4XRL A,#0EH JZ X11MOV A,R4ORL A,R4JZ X12X12: x11:MOV R4,#20HDEC R2SJMP X13MOV R4,#0FHMOV R2,04HX13:MOV R4,03HMOV R1,#48HMOV A,R2MOVX R1,AINC R1MOV A,R3MOVX R1,AMOV A,R4RETLS3: DB 07H,04H,08H,05H,09H,06H,0AHDB 0BH,01H,00H,02H,0FH,03H,0EH DB 0CH,0DHDI
19、S: PUSH DPH PUSH DPL SETB RS1 MOV R0,#7EH MOV R2,#20H MOV R3,#00H MOV DPTR,#LS0LS2: MOV A,R0MOVC A,A+DPTR MOV R1,#22HMOVX R1,A MOV A,R2 CPL ADEC R1 MOVX R1,A CPL ADEC R0LS1:DJNZ R3,LS1CLR C RRC AMOV R2,A JNZ LS2 INC R1MOV A,#0FFH MOVX R1,A CLR RS1POP DPLPOP DPH RETLS0: DB 0C0H,0F9H,0A4H,0B0H,99H,92H
20、 DB 82H,0F8H,80H,90H,88H,83H,0C6HDB 0A1H,86H,8EH,0FFH,0CH,89H,7FH,0BFH KEY: SETB RS1MOV R2,#0FEHMOV R3,#08HMOV R0,#00HLP1: MOV A,R2MOV R1,#21H MOVX R1,A RL AMOV R2,AMOV R1,#23H MOVX A,R1 CPL AANL A,#0FHJNZ LP0INC R0DJNZ R3,LP1 MOVX A,R1JB ACC.4,XP33MOV A,#19H SJMP XP3XP33:XP3:MOV A,#20HCLR RS1RETLP0
21、:CPL AJB ACC.0,XP0XP0:MOV A,#00H SJMP LPPJB ACC.1,XP1 MOV A,#08H SJMP LPPXP1:JB ACC.2,XP2XP2:MOV A,#10HSJMP LPPJB ACC.3,XP33LPP:MOV A,#18HADD A,R0CLR RS1LX0:CJNE A,#10H,LX0JNC XP35MOV DPTR,#LS3MOVC A,A+DPTRXP35:RETORG 0D50HSSEE:SETB RS1MOV R5,#05HSSE2:MOV 30H,#20HMOV 31H,#7EHMOV R7,#06HSSE1:MOV R1,#
22、21HMOV A,30H CPL AMOVX R1,AMOV R0,31HMOV A,R0MOV DPTR,#DDFFMOVC A,A+DPTRMOV R1,#22HMOVX R1,AMOV A,30HRR AMOV 30H,ADEC 31HMOV A,#0FFHMOVX R1,ADJNZ R7,SSE1DJNZ R5,SSE2CLR RS1RETDDFF: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90HDB 88H,83H,0C6H,0A1H,86H,8EH,0FFH,0CH,89H,0DEHEND 实验二、定时器、中断实验一. 实验目的:1.
23、 熟悉 C51 的指令系统。2. 理解 C51 单片机内部资源的特性和应用方法。3. 熟悉单片机内部定时 / 计数器功能,掌握初始化编程方法。 二 . 实验设备:1. DICE-DPJ-31 台2. 计算机 1 台3. 通信电缆 1 根三、实验内容 设计要求:1. 对定时器计数器 0 外部输入的脉冲进行计数,并送显示器显示。流程图如下 图所示:OiC2* tR4R5R6) +匚T送RIR5R6* (R7-P送附_ H Iy,结束3.用插针把8MHZ插孔和T插孔连接,P3.4依次接TOT7或单脉冲输出孔,执行程序,观察数码管上计数脉冲的速度及个数。参考程序如下SW09.asm4. 编写程序,从实
24、验系统键盘上输入时间初值,用定时器产生0.1S定时中断,对时钟计数器计数,并将数值实时地送数码管显示。参考程序如SWIO.asm定时中断1秒到吗? N 01叮秒单元蓿零,6(秒到吗?T恢复初值保护1秒加IN秒加1秒单元清零,和分到吗? N分加1分单元清零,24小时到吗? N时加1时单元清零 退栈返回5. 连续运行程序,在键盘上输入时间初值“时、分、秒”,按执行键FO/EX执行,数码管实时显示时间值。四.实验讨论: 问题回答后,写入实验报告)1. 给SW09.ASM口 SW10.ASM程序添加注释,说明各子程序所完成的功能。2. 修改程序SW09.AS使显示器上可显示到999999个脉冲个数。3
25、. 修改程序使定时器工作方式改变,调节有关参数,进一步提高精度。 附:SW09.ASI程序清单 仅供参考)ORG 0000HLJMP SE15ORG 06E0HSE15:LO29:ZOY0:LO30:MOV SP,#53HMOV P2,#0FFHMOV A,#43HMOV DPTR,#0FF20HMOVX DPTR,AMOV TMOD,#05HMOV TH0,#00HMOV TL0,#00HSETB TR0MOV R2,TH0MOV R3,TL0 LCALL ZOY0MOV R0,#79HMOV A,R6 LCALL PTDSMOV A,R5 LCALL PTDSMOV A,R4 LCALL
26、PTDSLCALL SSEESJMP LO29CLR AMOV R4,AMOV R5,AMOV R6,AMOV R7,#10HCLR CMOV A,R3RLC AMOV R3,AMOV A,R2RLC AMOV R2,AMOV A,R6 ADDC A,R6DA AMOV R6,AMOV A,R5 ADDC A,R5DA AMOV R5,AMOV A,R4 ADDC A,R4DA AMOV R4,ADJNZ R7,LO30RETPTDS: MOV R1,AACALL PTDS1MOV A,R1SWAP APTDS1:ANL A,#0FHMOV R0,AINC R0RETSSEE: SETB RS
27、1MOV R5,#05HSSE2: MOV 30H,#20HMOV 31H,#7EHMOV R7,#06HSSE1:MOV R1,#21HMOV A,30HCPL AMOVX R1,AMOV R0,31HMOV A,R0MOV DPTR,#DDFFMOVC A,A+DPTRMOV R1,#22HMOVX R1,AMOV A,30HRR AMOV 30H,ADEC 31HMOV A,#0FFHMOVX R1,ADJNZ R7,SSE1DJNZ R5,SSE2CLR RS1RETDDFF: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90HDB 88H,
28、83H,0C6H,0A1H,86H,8EH,0FFH,0CH,89H,0DEH END实验三、显示器接口实验一 . 实验目的:1. 掌握数码管和LCD显示器接口工作原理及显示程序的设计。2. 利用点阵式液晶显示器显示汉字或图形。3. 熟悉汇编语言程序设计方法以及如何使用仿真器排除程序错误。二. 实验设备:1. DICE-DPJ-3单片机实验仪1台2. 计算机1台3. 通信电缆1根三、实验内容1. 整个显示器由8个共阴极LED数码管组成。输入只有两个信号,它们是串行 数据线DIN和移位元信号CLK 8个串/并移位寄存器芯片74LS164首尾相连。 每片的并行输出作为LED数码管的段码。电路原理图
29、如下图所示,只画了 5个 数码管,其它3个跟前面一样。m,eut2. 编写并调试一个实验程序,让八个数码管顺次显示“51-READY。3. 实验步骤1)实验模块:DP-51单片机实验装置挂箱、DP-600模块单元挂箱2)将DP-51 CPU挂箱电源区对应直流电源插孔用双头导线与控制屏上电源 连接。3)用20芯扁平线将 DP-51和DP-600的CZ3接口对应连接。4)P3.0接A/B,P3.1接CP, P1.0接/CLR,调入程序运行,八个数码管顺次 显示“ 01234567”。4. 利用P1 口作为液晶显示器接口的数据线,P3 口作为其控制线,利用取模软 件建立标准字库后,通过查表程序依次将
30、字库中的字形代码送显示内存显示汉字或图形AT89S52L MOC D uD LE皿口7718 1I27293S310*J411J1J12LJi137271481忌rxn1 :TP 3斗4LI3TT过s1315u1731RS RfWECS1AllJX12 JP1SPINSPIN/RSTP1Q疔 PL1/T FU H3 PH PU PLS FITurn tJW nr to 砂 ii EWP nX2mFQEO的础的砂恥F7RP2議戲P1F3P2USE!5. 实验步骤V1)实验模块:DP-51单片机实验装置挂箱、DP-600模块单元挂箱2)将DP-51 CPU挂箱电源区对应直流电源插孔用双头导线与控制
31、屏上电源 连接。3)用20芯扁平线将 DP-51和DP-600的CZ3接口对应连接。4)用扁平线连 JP1座(P1 口到JX12座vDB0-DB7,连JP3座P3 口)到 JX14座,运行程序LCDQD1 .AS或 LCDQD2.ASM观察液晶屏显示。四. 实验讨论: 问题回答后,写入实验报告)1. 读EDIR.ASM程序,说明其功能。附: EDIR. ASM 程序清单仅供参考)A815 EQU 08100HDIR EQU8FFDHDBUF EQU 39HDCNT EQU 50HORG0MAIN: MOV SP,#6FHMOVDCNT,#20HMOVR7,#6MOVR0,#DBUFCLRAML
32、P0: MOV R0,AINCR0DJNZR7,MLP0MOVDPTR,#A815MOVA,#0C3HMOVXDPTR,AMLP1: LCALL DIRDJNZDCNT,MLP1MOVDCNT,#20HCONT: MOV R0,#DBUFMOVR7,#6CNT1: MOV A,R0ADDCA,#1DAACJNEA,#0AH,$+3JNCCNT2MOVR0,ASJMPMLP1CNT2: CLR AMOVR0,AINCR0DJNZR7,CNT1SJMPMLP1END。实验四、直流电机转速测量与控制实验一. 头验目的:1. 理解电机转速测量原理及程序的设计。2. 掌握利用单片机调速的方法及程序的设计
33、。3. 掌握汇编语言程序设计方法以及如何使用仿真器排除程序错误。二. 实验设备:1. DICE-DPJ-3单片机实验仪1台2. 计算机1台3. 通信电缆1根三. 实验内容利用DAC0832芯片进行数/模控制,输出的电压经放大后驱动小直流电机的 速度进行数字量调节。本实验可测量、设定、显示直流电机的转 速,程序中不断检测比较当前电机实际转速和设定转速,以判断程序中传送给 D/A 0832的数据应该增加还是减少,以此把数字量的变化转换成模拟量的变 化,以控制直流电机的转速。 注:设定输入、显示均为十六进制数据)本实验中通过直流电机和霍尔传感器组成测速机构 模块),小直流电机转盘上装有磁钢,霍尔传感
34、器装在转盘下面,当转盘转动一圈,磁钢感应传感器 一次,传感器产生一个脉冲信号,然后我们通过利用单片机的外部中断0计数,即可测出当前电机的实际转速。我们可以用实际转速和设定转速进行比 较,从而控制 D/A0832输出电压信号的大小,使得电机工作在程序设定的转 速,实验小直流机的闭环调速控制。mt:mi.K2 PL 1AOUTK4 一 P L 3Cl l|Od霍邛开关两3000Hh*eJDUT1KWT2P3a21J41IF*7UT1,-41V1.实验步骤V1)实验模块:DP-51单片机实验装置挂箱、DP-600模块单元挂箱2)将DP-51 CPU挂箱电源区对应直流电源插孔用双头导线与控制屏上电源
35、连接。3)用20芯扁平线将 DP-51和DP-600的CZ3接口对应连接。K8 K1; HOUT8000H , AOUTDJ , WR/IOWR,JX2JX0 。 DAC0832数模转换模块)。运行程序:数码管上显示“设定转速值 - - 当前转速值”!注意:设定圈数/S值不要太高,因为小直流电机实际转速大约在 1F/S,参考 程序见 control ASM。四. 实验讨论: 问题回答后,写入实验报告)1. 给control . ASM程序添加注释,说明各子程序所完成的功能?2. 利用控制电机定子电压接通和断开的占空比,即脉宽调速。试编写程序,以 驱动电机和改变电机的转速。附:control .
36、 ASM程序清单 仅供参考)ORG 0000HLJMP SE11ORG 0003HLJMP COUNTERORG 000BHLJMP CTIMEORG 0590HSE11:MOV SP,#53HMOV P2,#0FFHMOV A,#43H。开所有中断。开外部中断 0。外部中断 0 下降沿有效。开定时器 0 断 。定时器 0 工作在方式 1 。每50MS中断一次第一、第二位显示开关输入每秒钟转MOV DPTR,#0FF20H MOVX DPTR,A SETB EA SETB EX0 SETB IT0 SETB ET0 MOV TMOD,#01H MOV TH0,#0B4H MOV TL0,#00
37、H SETB TR0 MOV 40H,#00H MOV 41H,#00H MOV 42H,#00H MOV R6,#00H MOV 7EH,#00H 数MOV 7DH,#00H第三、第四位显示“ - - ”第五、第六位显示当前实际每秒钟转速MOV 7CH,#14HMOV 7BH,#14HMOV 7AH,#00H。MOV 79H,#00HLO18:LCALL SSEEMOV R7,#0FFH LO17: DJNZ R7,LO17MOV A,42HMOV R0,#79H LCALL PTDSMOV A,P1 。开关输入转数,并把数值送入显示缓冲区MOV B,AANL A,#0FHMOV 7DH,A
38、MOV A,BSWAP AANL A,#0FHMOV 7EH,AMOV DPTR,#8000HMOV A,R6 MOVX DPTR,A MOV A,42H MOV B,P1 SUBB A,B JZ LLAD: JC AA MOV R2,#09H LCALL DELYACJNE R6,#01H,L1 JMP LLL1: DEC R6JMP LLAA: MOV R2,#09HLCALL DELYACJNE R6,#0FFH,L2JMP LLL2: INC R6LL: SJMP LO18 ORG 0700HPTDS:MOV R1,A ACALL PTDS1 MOV A,R1 SWAP A由数码管第一
39、、第二位显示送 0832 转换 实际转速与设定转速进行比较。延时。延时拆送显示缓冲区PTDS1: ANL A,#0FH MOV R0,A INC R0 RET ORG 0D50HSSEE:SETB RS1 。换工作区MOV R5,#05HSSE2:MOV 30H,#20HMOV 31H,#7EHMOV R7,#06HSSE1:MOV R1,#21HMOV A,30HCPL A MOVX R1,A。字位送入MOV R0,31HMOV A,R0MOV DPTR,#DDFFMOVC A,A+DPTR。取字形代码 MOV R1,#22HMOVX R1,A 。字形送入MOV A,30HRR AMOV 3
40、0H,ADEC 31HMOV A,#0FFH MOVX R1,A。关显示DJNZ R7,SSE1。六位显示完了吗?DJNZ R5,SSE2。五次显示完了吗?CLR RS1RET COUNTER: INC 40H外部中断0,电机转一圈计数一次!RETI转动圈数!CTIME: MOV TH0,#0B4H定时器 0,定时1S,并显示每秒钟电机MOV TL0,#00HINC 41HMOV A,41HCJNE A,#20,WW。 20*50MS=1SMOV 42H,40H。42H用来存放1S钟的所转的圈数!MOV 40H,#00HMOV 41H,#00HWW: RETIDELYA: PUSH 02HDELYB: PUSH 02HDELYC: PUSH 02HDELYD: DJNZ R2,DELYDLCALL SSEEPOP 02HDJNZ R2,DELYCPOP 02HDJNZ R2,DELYBPOP 02HDJNZ R2,DELYARETDDFF: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90HDB88H,83H,0C6H,0A1H,86H,8EH,0FFH,0F1H,0C6H,092H,0BFHEND
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
