《在连续-时间控制系统中》由会员分享,可在线阅读,更多相关《在连续-时间控制系统中(5页珍藏版)》请在装配图网上搜索。
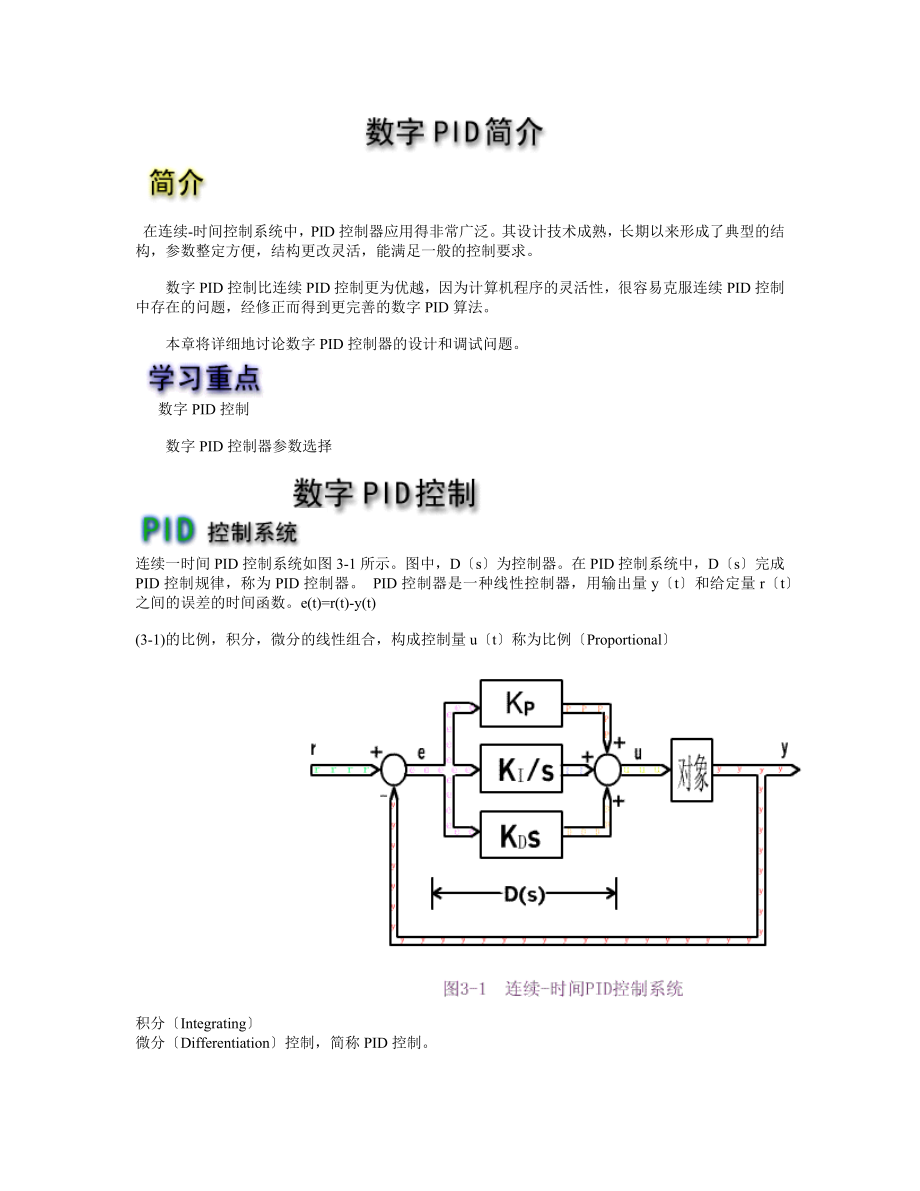
1、 在连续-时间控制系统中,PID控制器应用得非常广泛。其设计技术成熟,长期以来形成了典型的结构,参数整定方便,结构更改灵活,能满足一般的控制要求。 数字PID控制比连续PID控制更为优越,因为计算机程序的灵活性,很容易克服连续PID控制中存在的问题,经修正而得到更完善的数字PID算法。 本章将详细地讨论数字PID控制器的设计和调试问题。 数字PID控制 数字PID控制器参数选择连续一时间PID控制系统如图3-1所示。图中,Ds为控制器。在PID控制系统中,Ds完成PID控制规律,称为PID控制器。 PID控制器是一种线性控制器,用输出量yt和给定量rt之间的误差的时间函数。e(t)=r(t)-
2、y(t) (3-1)的比例,积分,微分的线性组合,构成控制量ut称为比例Proportional积分Integrating微分Differentiation控制,简称PID控制。 实际应用中,可以根据受控对象的特性和控制的性能要求,灵活地采用不同的控制组合,构成比例P控制器 (3-2)比例十积分PI控制器 (3-3)比例十积分十微分PID控制器 (3-4)式中 KP比例放大系数;TI积分时间; TD微分时间。 比例控制能迅速反响误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数的加大,会引起系统的不稳定。积分控制的作用是,只要系统有误差存在,积分控制器就不断地积累,输出控制量
3、,以消除误差。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。 应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分时间TD,使整个控制系统得到良好的性能。在电子数字计算机直接数字控制系统中,PID控制器是通过计算机PID控制算法程序实现的。计算机直接数字控制系统大多数是采样-数据控制系统。进入计算机的连续-时间信号,必须经过采样和整量化后,变成数字量,方能进入计算机的存贮器和
4、存放器,而在数字计算机中的计算和处理,不管是积分还是微分,只能用数值计算去逼近。 在数字计算机中,PID控制规律的实现,也必须用数值逼近的方法。当采样周期相当短时,用求和代替积分,用差商代替微商,使PID算法离散化,将描述连续-时间PID算法的微分方程,变为描述离散-时间PID算法的差分方程。考虑式3-4,用矩形积分时,有 (3-5)用差分代替微分 (3-6)将式3一5、3一6代入式3一4,PID算法变为 (3-7)或 式中 u 0控制量的基值,即k=0时的控制; uk第k个采样时刻的控制; KP比例放大系数; KI积分放大系数;KD微分放大系数; TS采样周期。 式3-7是数字PID算法的非
5、递推形式,称全量算法。算法中,为了求和,必须将系统偏差的全部过去值ejj=1,2,3,. ,k都存储起来。这种算法得出控制量的全量输出uk,是控制量的绝对数值。在控制系统中,这种控制量确定了执行机构的位置,例如在阀门控制中,这种算法的输出对应了阀门的位置开度。所以,将这种算法称为“位置算法。当执行机构需要的不是控制量的绝对值,而是控制量的增量例如去驱动步进电动机时,需要用PID的“增量算法。 由位置算法求出再求出两式相减,得出控制量的增量算法 3-8 式(3-8)称为增量式PID算法。 对增量式PID算法3-8归并后,得 (3-9)其中3-9已看不出是PID的表达式了,也看不出P、I、D作用的直接关系,只表示了各次误差量对控制作用的影响。从式3-9看出,数字增量式PID算法,只要贮存最近的三个误差采样值ek、ek-1、ek-2就足够了。这就是我们前面涉及的系统,系统中只有一个PID控制器,如图3-13所表示。计算机串级控制系统的典型结构如下列图3-14所示。 系统中有两个PID控制器,其中一个控制器的输出,作为另一个控制器的给定。图中,控制器PID2称副控制器,内环称副回路;PID1称主控制器,包围PID2的外环称主回路。主控器的输出控制作为副回路的给定量。串级控制系统的计算顺序是先主回路PID1后副回路PID2。控制方式有两种:异步采样控制和同步采样控制。
 在连续-时间控制系统中
在连续-时间控制系统中