 转向几何参数外文文献翻译、中英文翻译
转向几何参数外文文献翻译、中英文翻译

《转向几何参数外文文献翻译、中英文翻译》由会员分享,可在线阅读,更多相关《转向几何参数外文文献翻译、中英文翻译(22页珍藏版)》请在装配图网上搜索。
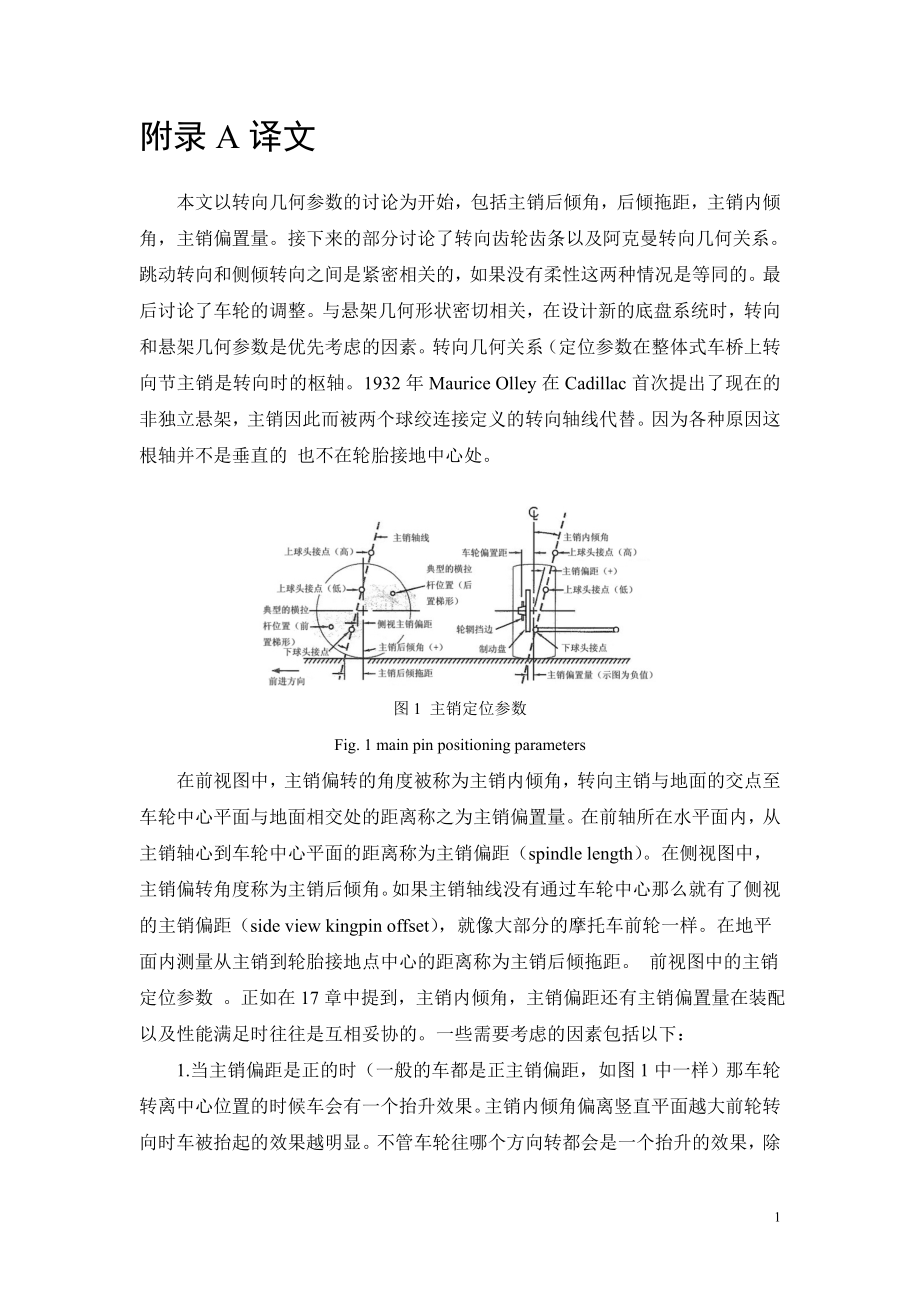
1、附录A译文本文以转向几何参数的讨论为开始,包括主销后倾角,后倾拖距,主销内倾角,主销偏置量。接下来的部分讨论了转向齿轮齿条以及阿克曼转向几何关系。跳动转向和侧倾转向之间是紧密相关的,如果没有柔性这两种情况是等同的。最后讨论了车轮的调整。与悬架几何形状密切相关,在设计新的底盘系统时,转向和悬架几何参数是优先考虑的因素。转向几何关系(定位参数在整体式车桥上转向节主销是转向时的枢轴。1932年Maurice Olley在Cadillac首次提出了现在的非独立悬架,主销因此而被两个球绞连接定义的转向轴线代替。因为各种原因这根轴并不是垂直的 也不在轮胎接地中心处。图1 主销定位参数Fig. 1 main
2、 pin positioning parameters在前视图中,主销偏转的角度被称为主销内倾角,转向主销与地面的交点至车轮中心平面与地面相交处的距离称之为主销偏置量。在前轴所在水平面内,从主销轴心到车轮中心平面的距离称为主销偏距(spindle length)。在侧视图中,主销偏转角度称为主销后倾角。如果主销轴线没有通过车轮中心那么就有了侧视的主销偏距(side view kingpin offset),就像大部分的摩托车前轮一样。在地平面内测量从主销到轮胎接地点中心的距离称为主销后倾拖距。 前视图中的主销定位参数 。正如在17章中提到,主销内倾角,主销偏距还有主销偏置量在装配以及性能满足时
3、往往是互相妥协的。一些需要考虑的因素包括以下:1.当主销偏距是正的时(一般的车都是正主销偏距,如图1中一样)那车轮转离中心位置的时候车会有一个抬升效果。主销内倾角偏离竖直平面越大前轮转向时车被抬起的效果越明显。不管车轮往哪个方向转都会是一个抬升的效果,除非主销是完全垂直的。这个效果只有在主销后倾角为零时才是两边对称的。见后面关于主销后倾角部分。对于一个给定的主销内倾角来说,主销偏距越大转向时的抬升量也越大。2.主销内倾角和主销偏距将车子前端抬起的效果对于自身来说是有助于低速转向的。在高速转向时,只要有主销后倾拖距就可能会掩盖掉转向时抬升和下落的效果。3.主销内倾角影响转向时车轮的外倾角特性。如
4、果主销向内倾斜(主销上端倾向车辆中心)当车轮转向的时候,车轮上端将会向外倾斜,趋向正的车轮外倾角。左右转向都会导致正的车轮外倾。如果跑道有比较紧的弯这个作用效果是比较小但却是有重要意义的。4.当车轮滚过颠簸不平的路面时,滚动半径是不断变化的,将会导致轮速的改变。这将会增加车轮中心的纵向力。这些力的反作用与主销偏距的大小成比例,成为反冲效果进入转向系统。如果主销偏距为零,那么将不会有由此引起的反冲。在前面提到的一辆通用“P”型车(菲罗车)中做出设计改动,与较早的一辆“P”型车模型相比,减小了主销偏距,因此而减少了不平路面上的反冲。5.如图1中所示的主销偏置量是负的,正如下面这辆前轮驱动车用的一样
5、。来自地面的驱动和制动力与主销偏置量成比例的转化成转向力矩。如果左右轮的制动或者驱动力是不等的,那么驾驶者将会感受到的到这个转向力矩(假设转向器有较高的逆效率)。只有在主销偏置量为零时才不会有这个力矩产生因为此时制动力或驱动力对主销的作用力臂为零。如果轮胎比较宽的话轮胎力通常并不是作用在轮胎中心平面内的,因为轻微的外倾角变化、路面不平、轮胎有一定圆锥度、或者其他的不对称因素存在。这些不对称因素可能导致转向反冲,即使没有前轮的各个定位参数作用。装配要求通常会与中心点转向要求冲突因而很多赛车在较平整的赛道上是采用较大的主销偏置量也是可以的。6.对于前轮驱动来说,一个负的主销偏置量有两个重要的稳定作
6、用:第一,固定方向盘,如果一个驱动轮打滑,另外一个轮将会外张一定角度,因为转向系统内有变形。即使两侧的牵引力不等,不同的牵引力使车辆产生一个偏航角,这个负的主销偏置量作用也会使车辆回复到直线行驶。第二,有良好的反馈作用情况下驾驶员从来不会真正的固定住方向盘。在这种情况下方向盘可能在不等的车轮纵向牵引力作用下而转动,因此而增加了负主销偏置量的稳定效果。制动的情况同样适用。负的主销偏置量能使车子回正,即使是在左右轮制动力不等的情况下(左右轮的制动情况或者路面情况不同时)。如图1中所示,在有后倾拖距时,侧视图中轮胎接地点是在主销之后的。或许最简单的例子就是办公室座椅上的小脚轮,不管移动多远,轮子总会
7、校正使其自身在枢轴之后。主销拖距越大意味着轮胎侧向力在主销轴上作用有更大的力臂。这会产生更明显的回正作用,并且是作用在主销上最主要的回正力矩。在选择主销后倾角和主销拖距时需要考虑的因素如下:1.主销后倾拖距越大转向力也越大。对于所有的车来说,小的后倾拖距都将会减小转向力。在某些情况下,如果后倾拖距减小接近零的话,人力转向也可能被用于重型轿车(代替助力转向)。2.像主销内倾角一样,主销后倾角伴随着转向过程也会引起车轮的抬起和回落。与内倾角不同的是,后倾角对两侧的影响是相反的。在有对称定位参数时(包括左右轮有相等的正的主销后倾角),左转的效应是使车向右侧倾,导致一个对角线的重量转移。在这种情况下,
8、左前右后对角线会承受更大的载荷,有一个左转时的过度转向效应。使用的弹簧越硬对角线的重量转移效果也会越明显因为这个是几何效应。每个车轮被抬起(或者下落)的距离是恒定的但是重量抬起量和底盘侧倾角是前后侧倾刚度的作用结果。这个对角线的载荷转移可以通过把车放在秤上和定位板上来测量。记住在实际比赛中前轮并没有转过很大的角度,除非是非常紧的发夹弯。例如,在一个半径是100英尺(时速在40-50英里)的弯,一个10英尺的轴距的中性转向车辆转弯时前轮只需要转过5.7(转向传动比是16:1时方向盘的转角大概在90)。对于只往一个方向转的车来说,因为整车为了寻求最低的最小离地间隙,可以使主销后倾角交错(左右主销后
9、倾角不同)来把车拉到一边。主销后倾角的交错也会影响上面提到的对角线重量抬升效应。如果两侧主销后倾角是相反的(一侧为正一侧为负且两侧角度大小相等)那么在转向时车的前端只会抬升和下落,而不会有对角线的重量抬升。3.主销后倾角也会影响转向外倾角,但是不像内倾角一样,这个效应是有利的。当有正的后倾角时将会导致外侧车轮内倾(车轮的上部指向车的中心)同时内测轮外倾角为正,两轮都向弯内倾。在侧滑恢复的时候,反打方向(出弯),后倾角引起的外倾角变化会使前轮抓地力减小。而此时后轮抓地力也很小并不需要很大的前轮抓地力。4.轮胎本身的轮胎拖距会使实际主销后倾拖距明显增加(有大的侧偏角时会减小)。这个效应并不是随着侧
10、向力变化而线性变化的,并且会影响转向力矩和驾驶感。特别是轮胎到极限时轮胎拖距会接近零,这时回正力矩会减小,并给车手一个信号轮胎就要侧滑了。如果主销后倾拖距相对轮胎拖距很大的话,轮胎拖距给出的这个信号会被掩盖。5.有时主销后倾拖距是在垂直于主销轴心的方向上进行测量的(而不是像图1中在水平面内测量的),因为这能更准确的描述轮胎侧向力对主销作用的力臂。拉杆位置图如下:图2 阿克曼转向几何关系Fig. 2 Ackermann turning geometry relation图3 阿克曼几何,齿条在前轴后Fig. 3 Ackerman geometry, rack behind front axle注
11、意在图1中的阴影部分就是转向拉杆的合适位置。侧向力引起的外倾角是不可避免的,如果拉杆的位置如图中示,会有不足转向效应。如果悬架和齿条安装在一些柔性的副车架上,情况要比现在的更加复杂。 当汽车前轮转向时,转向传动机构的设计将会决定车轮是保持平行还是一个轮比另一轮转过更多的角度。左右轮转向的角度差不应该被车轮前束值混淆,前束值是静态调整时的值,他是在阿克曼几何效应的基础上增减的。对于横向加速度较小的车(街车)一般使用阿克曼几何关系。正如图2左图所示,这个几何关系保证了所有轮子在没有滑动的情况下自由滚动,因为所有轮子只有一个滚动中心。需注意的是在低速时所有车轮的转弯半径都不同,前内侧轮必须比前外轮转
12、过更大的角度。一个合理的近似几何关系可见图3。根据Ref.99中Rudolf所说,阿克曼在1817年获得双枢轴转向系统的专利,CharlesJeantaud又提出了上段中的概念,消除了转向时车轮的滑动。MauriceOlley又提出了阿克曼转向几何关系的推导以使车轮免于镦粗平滑的砾石车道。在高侧向加速度下要对这个几何模型做明显的修改。实际轮胎都会有一个侧偏角,内侧轮的载荷也要比外侧轮小。回顾轮胎性能曲线可以看出负载较轻的时候获得峰值侧向力所需的侧偏角较小。使用低速几何结构(阿克曼关系),前内侧轮会被迫超过对应最大侧向力时的侧偏角,这样,拖动内轮会使轮胎升温并降低车速。对于赛车来说,通常使用平行
13、转向甚至反阿克曼结构如图2中(b)(c)所示。如果知道轮胎参数通常可以计算出正确的反阿克曼量。大部分情况下计算得到的几何关系是比较极端的因为车肯定会有低速行驶的情况,如进站加油等。另外值得注意的一点是比赛时大部分弯道半径都比较大阿克曼影响是非常小的。实际上,除非悬架、转向系统结构刚度很大,转向载荷作用下产生的变形也可能使车轮转向,会超过几何关系上的阿克曼转角关系(或者反阿克曼)。能产生阿克曼几何关系的最简单模型见图3,为后置转向。这里,齿条(以及转向器系统内的横拉杆连接)是在前轴之后的,从主销轴心开始画线,延伸到横拉杆外端,并交于后轴中心。转向节的这个角度使内轮转向角度大于外轮(转向时外张)可
14、以获得一个较好的近似的100%阿克曼关系。第二种获得内外轮转角差的方法是通过前移或后移齿条(或拉杆)的位置,这时两个拉杆外端球头间的连接不再是直线连接。图中后置梯形将齿条前移时将倾向于平行转向(最后至反阿克曼),齿条后移将增加转向时的前轮外张量(内外轮转角差更大)。图4 变更的转向几何关系-齿条前移或后移Fig.4 changing steering geometry-rack forward or backward第三种获得转角差的方法是使两边转向节臂不等长。节臂(从主销轴至拉杆外端的距离)越短转向时转角越大。当然这种不对称结构仅会用于只向一个方向转向的车辆椭圆形赛道赛车。虽然上文提到的一些
15、要求间会有冲突,笔者认为平行转向或者反阿克曼是一个较合理的折中方法。虽然平行转向时进站会有一点困难因为前轮会互相干涉。在高速时,弯道较大,转向角较小,相对参考的转向角度,阿克曼效应对于车轮的侧偏角影响不大。随着汽车电子技术的迅猛发展,人们对汽车转向操纵性能的要求也日益提高。汽车转向系统已从传统机械转向、液压助力转向(Hydraulic Power Steering ,简称HPS) 、电控液压助力转向( Electric Hydraulic PowerSteering , 简称EHPS) ,发展到电动助力转向系统(Electric Power Steering ,简称EPS) ,最终还将过渡到线
16、控转向系统(Steer By Wire ,简称SBW)。机械转向系统是指以驾驶员的体力作为转向能源,其中所有传力件都是机械的,汽车的转向运动是由驾驶员操纵方向盘,通过转向器和一系列的杆件传递到转向车轮而实现的。机械转向系由转向操纵机构、转向器和转向传动机械3大部分组成。通常根据机械式转向器形式可以分为:齿轮齿条式、循环球式、蜗杆滚轮式、蜗杆指销式。应用最广的两种是齿轮齿条式和循环球式(用于需要较大的转向力时) 。在循环球式转向器中,输入转向圈与输出的转向摇臂摆角是成正比的;在齿轮齿条式转向器中,输入转向圈数与输出的齿条位移是成正比的。循环球式转向器由于是滚动摩擦形式,因而正传动效率很高,操作方
17、便且使用寿命长,而且承载能力强,故广泛应用于载货汽车上。齿轮齿条式转向器与循环球式相比,最大特点是刚性大,结构紧凑重量轻,且成本低。由于这种方式容易由车轮将反作用力传至转向盘,所以具有对路面状态反应灵敏的优点,但同时也容易产生打手和摆振等现象,且其承载效率相对较弱,故主要应用于小汽车及轻型货车上,目前大部分低端轿车采用的就是齿轮齿条式机械转向系统。随着车辆载重的增加以及人们对车辆操纵性能要求的提高,简单的机械式转向系统已经无法满足需要,动力转向系统应运而生,它能在驾驶员转动方向盘的同时提供助力,动力转向系统分为液压转向系统和电动转向系统2 种。其中液压转向系统是目前使用最为广泛的转向系统。液压
18、转向系统在机械系统的基础上增加了液压系统,包括液压泵、V 形带轮、油管、供油装置、助力装置和控制阀。它借助于汽车发动机的动力驱动液压泵、空气压缩机和发电机等,以液力、气力或电力增大驾驶员操纵前轮转向的力量,使驾驶员可以轻便灵活地操纵汽车转向,减轻了劳动强度,提高了行驶安全性。液压助力转向系统从发明到现在已经有了大约半个世纪的历史,可以说是一种较为完善的系统,由于其工作可靠、技术成熟至今仍被广泛应用。它由液压泵作为动力源,经油管道控制阀向动力液压缸供油,通过活塞杆带动转向机构动作,可通过改变缸径及油压的大小来改变助力的大小,由此达到转向助力的作用。传统液压式动力转向系统一般按液流的形式可以分为:
19、常流式和常压式2 种类型,也可根据控制阀形式分为转阀式和滑阀式。随着液压动力转向系统在汽车上的日益普及,人们对操作时的轻便性和路感的要求也日益提高,然而液压动力转向系统却存在许多的缺点:由于其本身的结构决定了其无法保证车辆在任何工况下转动转向盘时,都有较理想的操纵稳定性,即无法同时保证低速时的转向轻便性和高速时的操纵稳定性;汽车的转向特性受驾驶员驾驶技术的影响严重;转向传动比固定,使汽车转向响应特性随车速、侧向加速度等变化而变化,驾驶员必须提前针对汽车转向特性幅值和相位的变化进行一定的操作补偿,从而控制汽车按其意愿行驶。这样增加了驾驶员的操纵负担,也使汽车转向行驶中存在不安全隐患;而此后出现了
20、电控液压助力系统,它在传统的液压动力转向系统的基础上增加速度传感器,使汽车能够随着车速的变化自动调节操纵力的大小,在一定程度上缓和了传统的液压转向系统存在的问题.目前我国生产的商用车和轿车上采用的大多是电控液压助力转向系统,它是比较成熟和应用广泛的转向系统。尽管电控液压助力装置从一定程度上缓解了传统的液压转向中轻便性和路感之间的矛盾,然而它还是没有从根本上解决HPS 系统存在的不足,随着汽车微电子技术的发展,汽车燃油节能的要求以及全球性倡导环保,其在布置、安装、密封性、操纵灵敏度、能量消耗、磨损与噪声等方面的不足已越来越明显,转向系统向着电动助力转向系统发展。电动助力转向系统是现在汽车转向系统
21、的发展方向,其工作原理是:EPS 系统的ECU 对来自转向盘转矩传感器和车速传感器的信号进行分析处理后,控制电机产生适当的助力转矩,协助驾驶员完成转向操作。近几年来,随着电子技术的发展,大幅度降低EPS的成本已成为可能,日本的大发汽车公司、三菱汽车公司、本田汽车公司、美国的Delphi 汽车系统公司、TRW公司及德国的ZF 公司都相继研制出EPS。Mercedes2Benz 和Siemens Automotive 两大公司共同投资6500万英镑用于开发EPS ,目标是到2002 年装车,年产300 万套,成为全球EPS 制造商。到目前为止,EPS 系统在轻微型轿车、厢式车上得到广泛的应用,并且
22、每年以300 万台的速度发展。转向是一个专业术语,适用于采集部件,联系等,其中允许一艘(舰船)或汽车(轿车)按照预期的方向行驶. 一个例外的情况是铁路运输由路轨组合在一起铁路道岔提供转向功能。许多现代轿车使用齿轮齿条式转向器,在方向盘末端有转动齿轮;该齿轮带动齿条移动,它是一种线性的齿轮紧密配合,从一边到一边。这种运动把转矩通过转向横拉杆和一种叫做转向节臂的短形臂传递给转向轮的主销。以前的设计往往采用循环球式转向器,而这种转向器仍然应用在卡车和多用途车辆。这是一种老式的螺母和齿扇设计,该转向管柱转动大螺丝(蜗轮),它与一个齿扇齿轮啮合,当蜗轮转动时,齿扇也随之转动,一个安装在齿扇轴上且与转向联
23、动有关的摇臂带动转向节臂,从而使车轮转动. 循环球式转向器通过安装滚珠减少螺母和螺杆之间的摩擦;两根导管和螺母内的螺旋管状通道组合成两条各自独立的封闭的钢球“流动”。齿轮齿条式转向器设计具有很大程度的反馈和直接转向路感;它也通常不会有任何反弹,或呆滞。缺点是,它是不可调的,因此当它磨损唯一的解决办法更换。循环球式转向器的优点是机械优势,因此,它被使用在较大较重的车辆,而齿轮齿条式原本仅限于较小和较轻;由于几乎普遍采用动力转向系统,不过,这已不再是一个重要的优势,导致越来越多地在新型汽车应用齿轮齿条式转向器。循环球式转向器设计在中心也有明显的冲击,或死点。凡一分钟交替方向盘出不来并不移动转向机构
24、;这是很容易可调螺杆的端部来减少磨损,但它并不能完全消除或机制开始磨损很快。这项设计目前仍在使用中,在卡车和其他大型车辆,也应用于迅速转向,路感与稳健性,可维护性,和机械的优势相比不太重要的场合。较小程度的反馈,这样的设计也有时是一种优点;当前轮碰撞时,使用齿轮齿条转向的司机只有自己的大拇指受伤,造成方向盘揭开一边突然(因为驾驶教练告诉学生把自己的大拇指在前面的方向盘,而非放在左右的内边缘). 这种效果在像卡车一样的重型汽车更为明显;循环球式转向防止这种程度的反馈,只是因为它可以在正常情况下防止可取反馈。转向连锁连接转向器和车轮通常符合一个阿克曼转向几何的变化,它交代了一个事实:当转向是,内轮
25、转过的半径比外轮小得多,因此适合驾驶的直路,是不适合曲折。由于车辆已成为较重而改用前轮驱动,为了扭转方向盘,通常的,主要的是体力。为了解决这一问题,汽车业发展的动力转向系统。有两种类型的助力转向系统-液压和电气/电子。还有一种液压-电动混合系统。液压助力转向系统(hps)利用油压供应的一个发动机驱动泵,以协助将方向盘转转动。电动助力转向系统(EPS)方式,是较有效率的液压助力转向系统,由于电动助力转向汽车只需要提供协助时,方向盘被转动,而液压泵必须不断运行。在EPS的帮助下是很容易调节车型,最高车速,甚至驾驶的喜好。另外一个好处是,通过泄漏和处置动力转向液消除对环境构成危险。动力转向的分支是速
26、度可调转向而转向是大量辅助以低速行驶,稍微协助高速。汽车制造商认位,当要停车时驾驶人可能需要做出大量转向投入,但当时高速行驶时则不然。第一辆有这特点的汽车,是雪铁龙与其diravi,虽然改变了现代汽车转向系统资金的投入,但它改变了定心凸轮的压力,使得方向盘尽力去回到原来的位置。现代速度可调式动力转向系统,当速度增长时减少了活塞的压力,给予更直接的感受,这一特点在所有新车正逐渐成为司空见惯。附录B外文文献SteeringsystemsIntroductionThischapterbeginswithadiscussionofsteeringgeometrycasterangle,trail,ki
27、ngpininclination,andscrubradius.ThenextsectiondiscussAckermanngeometryfollowedbysteeringracksandgears.Ridesteer(bumpsteer)androllsteerarecloselyrelatedtoeachother;withoutcompliancetheywouldbethesame.Finally,wheelalignmentisdiscussed.thischapteristiedtochapter17 onsuspensiongeometrywhendesigninganewc
28、hassis,steeringandsuspensiongeometryconsiderationsarehighpriorities.1steeringgeometryThekingpininasolidfrontaxleisthesteeringpivot.Inmodernindependentsuspensions,introducedbyMauriceolleyatCadillacin1932,thekingpinisreplacedbytwo(ormore)balljointsthatdefinethesteeringaxis.Thisaxisisnotverticalorcente
29、redonthetirecontactpatchforanumberofreason.seefigure1toclarifyhowkingpinlocationismeasured.Infrontview,theangleiscalledkingpininclinationandtheoffsetofthesteeringaxisfromthecenterofthetireprintmeasuredalongthegroundiscalledscrub(orscrubradius).Thedistancefromthekingpinaxistothewheelcenterplane,measu
30、redhorizontallyataxleheight,isthespindlelength.Insideviewthekingpinangleiscalledcasterangle;ifthekingpinaxisdoesnotpassthroughthewheelcenterthensideviewkingpinoffsetispresent,asinmostmotorcyclefrontends.Thedistancemeasuredonthegroundfromthesteeringaxistothecenterofthetireprintisthetrail(calledcaster
31、offsetinref.1)Fig. 1 main pin positioning parametersKingpin front view geometry As mentioned 7, kingpin inclination ,spindle length ,and scrub are usually a compromise between packaging and performance requirements .Some factors to consider include : 1. The effect of kingpin inclination and spindle
32、length in raising the front end ,by itself ,is to aid centering of the steering at low speed .At high speed any trail will probably swamp out the effect that raise ad fall have on centering .2. Kingpin inclination affects the steer camber characteristic .when a wheel is steered ,it will lean out at
33、the top ,toward positive camber ,if the kingpin is inclined in the normal direction (toward the center of the car at the upper end ). Positive camber results for both left and right-hand steer .the amount of this effect is small ,but significant if the track includes tight turns. 3. When a wheel is
34、rolling over a bumpy road ,the rolling radius is constantly changing ,resulting in changes of wheel rotation speed . This gives rise to longitudinal forces at the wheel center .The reaction of these forces will introduce kickback into the steering in proportion to the spindle length .If the spindle
35、length is zero then there will be no kick from this source .Design changes made in the last model of the GM P car (fiero ) shortened the spindle length and this resulted in less wheel kickback on rough roads when compared to early model P cars.4. The scrub radius shown in figure1 is negative ,as use
36、d on front-wheel drive cars (see below ) . driving or braking forces (at the ground ) introduce steer torques proportional to the scrub radius . If the driving or braking force is different on left and right wheels then there will be a net steering torque felt by the driver (assuming that the steeri
37、ng gear has good enough rev erse efficiency ).The only time that this is not true is with zero scrub (centerpoint steering ) because there is no moment arm for the drive (or brake ) force to generate torque about the kingpin . With very wide tires the tire forces often are not centered in the wheel
38、center plane due to slight changes in camber ,road surface irregularities ,tire nonuniformity (conicity ),or other asymmetric effects .These asymmetries can cause steering kickback regardless of the front view geometry .Packaging requirements often conflict with centerpoint steering and many race ca
39、rs operate more or less okay on smooth tracks with large amounts of scrub . 6. For front drive ,a negative scrub radius has two strong stabilizing effects :first ,fixed steering wheel if one drive wheel loses traction ,the opposing wheelwilltoeoutanamountdeterminedbythesteercomplianceinthesystem.Thi
40、swilltendtosteerthecarinastraightline,eventhoughthetractiveforceisnotequalside-tosideandtheunequaltractiveforceisapplyingayawmomenttothevehicle.Second,withgoodreverseefficiencythedrivershandsnevertrulyfixthesteeringwheel.Inthiscasethesteeringwheelmaybeturnedbytheeffectofunevenlongitudinaltractivefor
41、ces,increasingthestabilizingeffectofthenegativescrubradius.Underbrakingthesameistrue.Negativescrubradiustendstokeepthecartravelingstraightevenwhenthebrakingforceisnotequalontheleftandrightsidefronttiresome(duetodifferencesintheroadwayorthebrakes).CasterangleandtrailWithmechanicaltrail,showninfigure1
42、,thetireprintfollowsbehindthesteeringaxisinsideview.Perhapsthesimplestexampleisonanofficechaircasterwithanydistanceoftravel,thewheelalignsitselfbehindthepoint.Moretrailmeansthatthetiresideforcehasalargemomentarmtoactonthekingpinaxis.Thisproducesmoreself-centeringeffectandistheprimarysourceofself-cen
43、teringmomentaboutthekingpinaxisatspeed.Someconsiderationsforchoosingthecasterangleandtrailare:1.Moretrailwillgivehighersteeringforce.withallcars,lesstrailwilllowerthesteeringforce.Insomecases,manualsteeringcanbeusedonheavysedans(insteadofpowersteering)ifthetrailisreducedtoalmostzero.2.Casterangle,li
44、kekingpininclination,causethewheeltoriseandfallwithsteer.unlikekingpininclination,theeffectisoppositefromsidetoside.Withsymmetricgeometry(includingequalpositivecasteronleftandrightwheels),theeffectofleftsteeristorollthecartotheright,causingadiagonalweightshift.Inthiscase,moreloadwillbecarriedontheLF
45、RRdiagonal,anoversteereffectinaleft-handturn.Thediagonalweightshiftwillbelargerifstifferspringingisusedbecausethisisageometriceffect.Thedistanceeachwheelrises(orfalls)isconstantbuttheweightjackingandchassisrollanglearefunctionsofthefrontandrearrollstiffness.Thisdiagonalloadchangecanbemeasuredwiththe
46、caronscalesandalignment(weaver)plates.Keepinmindthatthefrontwheelsarenotsteeredverymuchinactualracing,exceptontheverytightesthairpinturns.Forexample,ona100-ft.radius(a40-50mphturn),a10-ft.wheelbaseneutralsteercarneedsonlyabout0.1rad.(5.7)ofsteeratthefrontwheels(witha16:1steeringratiothisisabout90deg
47、reeatthesteeringwheel).Forcarsthatturninonedirectiononly,casterstagger(differencesinleftandrightcaster)isusedtocausethecartopulltoonesideduetothecarseekingthelowestrideheight.casterstaggerwillalsoaffectthediagonalweightjackingeffectmentionedabove.Ifthecasterisopposite(positiveononesideandnegativethe
48、samenumberofdegreesontheotherside)thenthefrontofthecarwillonlyriseandfallwithsteer,no diagonal weight jacking will occur . 3. Caster angle affects steer-camber but ,unlike kingpin inclination ,the effect is favorable . With positive caster angle the outside wheel will camber in a negative direction
49、(top of the wheel toward the center of the car ) while the inside wheel cambers in a positive direction , again learning the turn . In skid recovery , opposite lock (steer out of the turn ) is used and in this case the steercamber resulting from caster angle is in the wrongdirection for increased fr
50、ont tire grip . conveniently ,this condition results from very low lateral force at the rear so large amounts of front grip are not needed . 4. As discussed , tires have pneumatic trail which effectively adds to (and at high slip Angles subtracts from ) the mechanical trail . This tire effect is non
51、linear with lateral force and affects steering torque and driver feel .In particular , the fact that pneumatic trail approaches zero as the tire reaches the limit will result in lowering the self-centering torque and can be s signal to the driver that the tire is near breakaway . The pneumatic trail
52、 breakaway signal will be swamped out by mechanical trail if the mechanical trail is compared to the pneumatic trail .5.Sometimes the trail is measured in direction perpendicular to the steering axis (rather than horizontal as shown ) because this more accurately describes the lever (moment ) arm th
53、at connects the tire lateral forces to the kingpin . Fig. 2 Ackermann turning geometry relationFig. 3 Ackerman geometry, rack behind front axleTierodlocationNotethatinfigure1ashadedareaisshownforthesteeringtierodlocation.Cambercomplianceunderlateralforceisunavoidableandifthetierodislocatedasnoted,th
54、eeffectonthesteeringwillbeintheundersteer(steeroutoftheturn)directionbecomesmuchmorecomplexthancanbecoveredhere.2AckermansteeringgeometryAsthefrontwheelsofavehiclearesteeredawayfromthestraight-aheadposition,thedesignofthesteeringlinkagewilldetermineifthewheelsstayparallelorifonewheelsteersmorethanth
55、eother.ThisdifferenceinsteerAnglesontheleftandrightwheelsshouldnotbeconfusedwithtoe-inortoe-outwhichareadjustmentsandaddto(orsubtractfrom)Ackermangeometriceffects.Forlowlateralaccelerationusage(streetcars)itiscommontouseAckermangeometry.asseenontheleftoffigure2,thisgeometryensuresthatallthewheelsrol
56、lfreelywithnoslipAnglesbecausethewheelsaresteeredtotrackacommonturncenter.Notethatatlowspeedallwheelsareonasignificantlydifferentradius,theinsidefrontwheelmuststeermorethantheouterfrontwheel.Areasonableapproximationtothisgeometrymaybeasshowninfigure3.ccording to ref .99, Rudolf Ackerman patented the
57、 double pivot steering system in 1817 andCharles Jeantaud added the concept mentioned above to eliminate wheel scrubbing when cornering . Another reason for Ackermann geometry ,mentioned by Maurice olley , was to keep carriage wheels from upsetting smooth gravel driveways . High lateral acceleration
58、s change the picture considerably . NowthetiresalloperateatsignificantslipAnglesandtheloadsontheinsidetrackarelessthanontheoutsidetrack. Lookingbacktothetireperformancecurves,itisseenthatlessslipangleisrequiredatlighterloadstoreachthepeakofthecorneringforcetoahigherslipanglethanrequiredformaximumsid
59、eforce.DraggingtheinsidetirealongathighslipAngles(aboveforpeaklateralforce)raisethetiretemperatureandslowsthecardownduetoslipangle(induced)drag.Forracing,itiscommontouseparallelsteeringorevenreverseAckermannasshownonthecenterandrightsideoffigure2.ItispossibletocalculatethecorrectamountofreverseAcker
60、mannifthetirepropertiesandloadsareknown.Inmostcasestheresultinggeometryisfoundtobetooextremebecausethecarmustalsobedriven(orpushed)atlowspeeds,forexampleinthepits.AnotherpointtorememberisthatmostturnsinracinghaveafairlylargeradiusandtheAckermanneffectisverysmall.Infact,unlessthesteeringsystemandsusp
61、ensionareverystiff,compliance(deflection)undercorneringloadsmaysteerthewheelsmorethananyAckermann(orreverseAckermann)builtintothegeometry.ThesimplestconstructionthatgeneratesAckermannngeometryisshowninfigure3forrearsteer.Here,therack(crosslinkorrelayrodinsteeringboxsystems)islocatedbehindthefrontaxleandlinesstaringatthekingpinaxis,extendedthroughtheoutertierodends,intersectinthecenteroftherearaxle.Theangularit
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
