 GPS相对定位基本原理
GPS相对定位基本原理

《GPS相对定位基本原理》由会员分享,可在线阅读,更多相关《GPS相对定位基本原理(24页珍藏版)》请在装配图网上搜索。
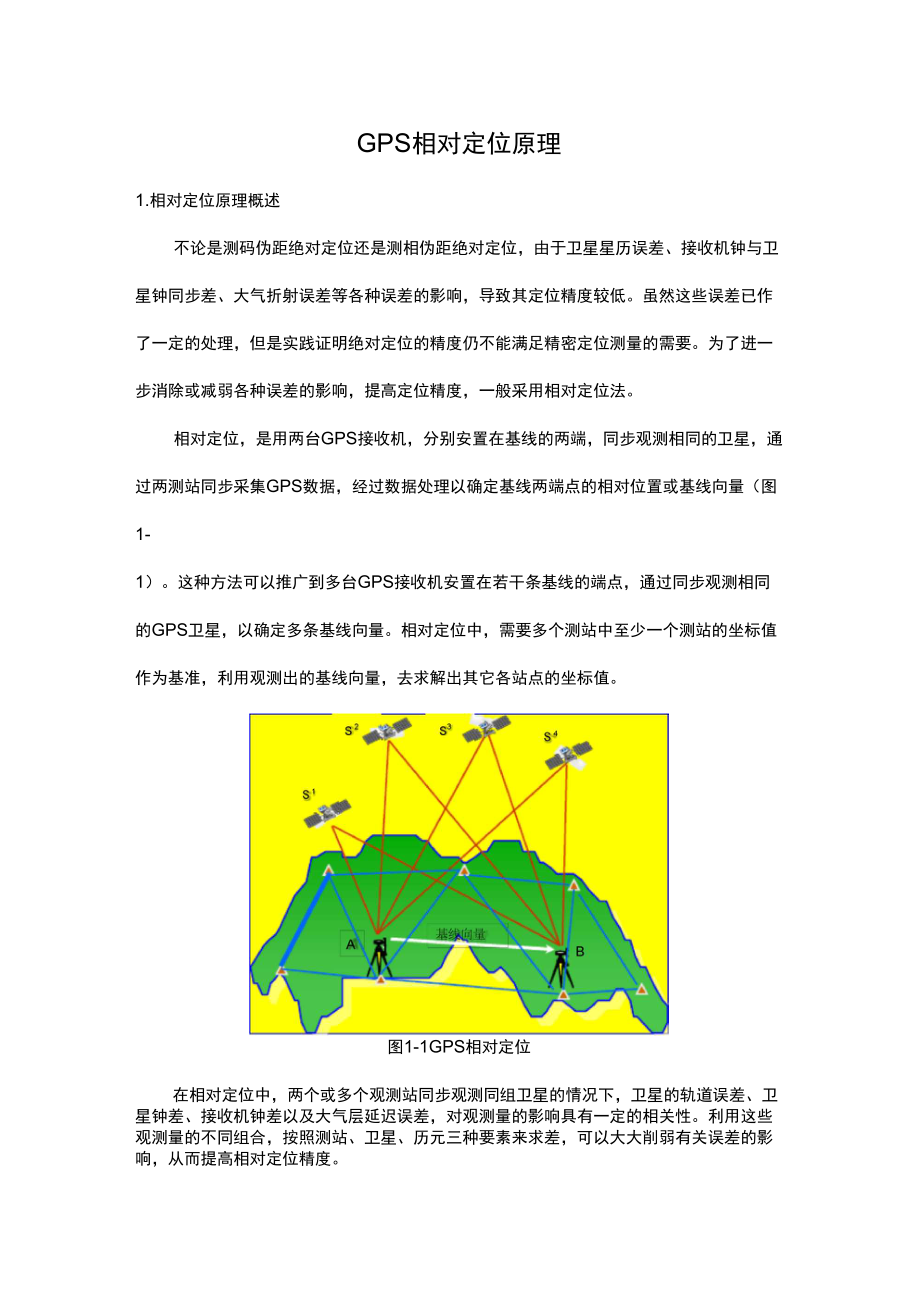
1、GPS相对定位原理1.相对定位原理概述不论是测码伪距绝对定位还是测相伪距绝对定位,由于卫星星历误差、接收机钟与卫星钟同步差、大气折射误差等各种误差的影响,导致其定位精度较低。虽然这些误差已作了一定的处理,但是实践证明绝对定位的精度仍不能满足精密定位测量的需要。为了进一步消除或减弱各种误差的影响,提高定位精度,一般采用相对定位法。相对定位,是用两台GPS接收机,分别安置在基线的两端,同步观测相同的卫星,通过两测站同步采集GPS数据,经过数据处理以确定基线两端点的相对位置或基线向量(图1-1)。这种方法可以推广到多台GPS接收机安置在若干条基线的端点,通过同步观测相同的GPS卫星,以确定多条基线向
2、量。相对定位中,需要多个测站中至少一个测站的坐标值作为基准,利用观测出的基线向量,去求解出其它各站点的坐标值。图1-1GPS相对定位在相对定位中,两个或多个观测站同步观测同组卫星的情况下,卫星的轨道误差、卫星钟差、接收机钟差以及大气层延迟误差,对观测量的影响具有一定的相关性。利用这些观测量的不同组合,按照测站、卫星、历元三种要素来求差,可以大大削弱有关误差的影响,从而提高相对定位精度。根据定位过程中接收机所处的状态不同,相对定位可分为静态相对定位和动态相对定位(或称差分GPS定位)。2.静态相对定位原理设置在基线两端点的接收机相对于周围的参照物固定不动,通过连续观测获得充分的多余观测数据,解算
3、基线向量,称为静态相对定位。静态相对定位,一般均采用测相伪距观测值作为基本观测量。测相伪距静态相对定位是当前GPS定位中精度最高的一种方法。在测相伪距观测的数据处理中,为了可靠的确定载波相位的整周未知数,静态相对定位一般需要较长的观测时间(1.0h3.0h),称为经典静态相对定位。可见,经典静态相对定位方法的测量效率较低,如何缩短观测时间,以提高作业效率便成为广大GPS用户普遍关注的问题。理论与实践证明,在测相伪距观测中,首要问题是如何快速而精确的确定整周未知数。在整周未知数确定的情况下,随着观测时间的延长,相对定位的精度不会显著提高。因此提高定位效率的关键是快速而可靠的确定整周未知数。为此,
4、美国的RemondiB.W提出了快速静态定位方法。其基本思路是先利用起始基线确定初始整周模糊度(初始化),再利用一台GPS接收机在基准站T0静止不动的对一组卫星进行连续的观测,而另一台接收机在基准站附近的多个站点Ti上流动,每到一个站点则停下来进行静态观测,以便确定流动站与基准站之间的相对位置,这种“走走停停”的方法称为准动态相对定位。其观测效率比经典静态相对定位方法要高,但是流动站的GPS接收机必须保持对观测卫星的连续跟踪,一旦发生失锁,便需要重新进行初始化工作。这里将讨论静态相对定位的基本原理。2.1观测值的线性组合假设安置在基线端点的GPS接收机Ti1,2,相对于卫星Sj和Sk,于历元t
5、i1,2进行同步观测(如图2-1),则可获得以下独立的载波相位观测量:didiHI2kdidi222di2t222t1在静态相对定位中,利用这些观测量的不同组合求差进行相对定位,可以有效地消除这些观测量中包含的相关误差,提高相对定位精度。目前的求差方式有三种:单差、双差、三差,定义如下:单差(Single-Differenee):不同观测站同步观测同一颗卫星所得观测量之差j2t1jt(2-1) 双差(Double-Differenee):不同观测站同步观测同组卫星所得的观测量单差之差k1K22di三差(Triple-Differenee):不同历元同步观测同组卫星所得的观测量双差之差2.2观测
6、方程2.2.1单差观测方程1tsj(t)j图2-2单差示意图测相伪距观测方程为:ijtijtetitttN;ti,iptijTt(2-4)T2,并代入参见图2-2,将(2-4)式的测相伪距观测方程应用于测站T,、(2-1)式,可得:52-J2N令ttt2tt1t,NjN2tN1tIt2,itI,t,Tt2,ttIt则单差观测方程可写为:jt21ijtcttNjj,tTt(2-6)由(2-6)式可见:卫星的钟差影响可以消除。同时由于两测站相距较近(100km),同一卫星到两个测站的传播路径上的电离层、对流层延迟误差的相近,取单差可进一步明显的减弱大气延迟的影响。222双差观测方程图2-3双差示意
7、图参见图2-3,两台GPS接收机安置在测站Ti,对卫星Sj的单差为jt,对卫星Sk的单差为kt,则由(2-6)式,双差观测方程可表示为:ijtNj(2-7)在上式中可见,接收机的钟差影响完全消除,大气折射残差取二次差可以略去不计。这是双差模型的突出优点。2.2.3三差观测方程参见图2-1,分别以t!和t2两个观测历元,对上述的双差观测方程求三次差,可得三差观测方程为tkt22kt12j2t2jt12kt2t1kt1t1j2t1jt1t1(2-8)从三差观测方程中可见,三差模型进一步消除了整周模糊度的影响。2.2.4准动态相对定位观测方程准动态相对定位方法是将一台GPS接收机固定在基准站不动,而
8、另一台接收机在其周围的观测站流动,在每个流动站静止观测几分钟,以确定流动站与基准站之间的相对位置。准动态相对定位的数据处理是以载波相位观测量为依据的,其中的整周未知数在初始化的过程中已经预先解算出来。因此,准动态相对定位可以在非常短的时间内获得与经典静态相对定位精度相当的定位结果。根据(2-4)式的测相伪距观测方程,若整周模糊度Nijt0已经确定,将其移到等式左端,则测相伪距观测方程可以写为Rijtijtctittjtij,Itij,Tt(2-9)式中:RijtijtNijt0。若忽略大气折射残差影响,则上式求取站间单差观测方程可得:RJ2-9)式,再对卫星间取双差可得:Rkt2kt1kt2j
9、t1jt若采用双差模型进行准动态相对定位,则由(2-11)2.3静态相对定位观测方程的线性化及平差模型为了求解测站之间的基线向量,首先就应该将观测方程线性化,然后列出相应的误差方程式,应用最小二乘法平差原理求解观测站之间的基线向量。下面我们根据间接平差原理来讨论载波相位观测量的不同线性组合的平差模型。假设,在协议地球坐标系中,观测站T的待定坐标近似值向量为TXi0Xi0yi0Zi0其改正数向量为TXi0Xiyiz观测站T至卫星Sj的测相伪距方程是非线性的,必须将其线性化。2.3.1单差模型取两个观测站T,和T2,其中T为基准站,其坐标已知。线性化的载波相位单差观测方程:jm2JTdi式中,大气
10、折射延迟误差的残差很小,忽略。于是相应的误差方程可写成如下形式:1.vjt丄l2jm2tn2X2y2Z2ttNjljt(2-13)式中:ljtj20t上述情况是两观测站同时观测同一颗卫星Sj的情况,可以将其推广到两观测站于历元t时刻同时观测数颗卫星的情况,设同步观测的卫星数为nj颗,则相v1t1;t1.mtn1t2丄i2丄2丄2丄vt112tm2tn2tMMMMnjvt12Jtnjm2tnjn2t或者写为应的方程组为:1N1l1tX22.2丄1N1ty2fMttMMy21Nn1“tcttt1t(2-14)vtatX2btN式中,P为单差观测量的权矩阵。单差模型的解的精度可按下式估算:myO.q
11、yy(2-18)式中:为单差观测量的单位权中误差;qyy为权系数阵N1主对角线的相应元若进一步考虑到观测的历元次数为m,则相应的误差方程为:vt1at1bt1ct1OLOtt1lt1vt2at2bt2Oct2LOtt2lt2MMX2MNMMOMMMVtntatntbOOLc*t*lg上式可写为VAX2BNCtL(2-15)或者X2VABCNL(2-16)t按最小一乘法求解:X2A1ANBPABCBPL(2-17)tCC素。必须注意的事,当不同历元同步观测的卫星数不同时,情况将比较复杂,此时应该注意系数矩阵A、B、C的维数。这种在不同观测历元共视卫星数发生变化的情况,在后述的双差、三差模型也会遇
12、到。2.3.2双差模型假设两个观测站Ti和T2同步观测了两颗卫星Sj和Sk,其中Ti为基准站,其坐标已知,Sj为参考卫星。根据双差观测方程(2-7)式,则双差观测方程的线性化形式可表示为:k丄m2tX2y2Z2Nkikt2otNkNkNj.lkl2km2kn2lkl2km2kn2l2m2n2相应的误差方程可以写为:l;tkn2xy2Z2Nklkt(2-19)式中:lkt2。tikt2。tijt当同步观测的GPS卫星为nj时,可将(2-i9)式推广成如下形式的方程组:V1ti;t1m;tn;t10N1l1tV2t1i;ttn;tx;N2l2tMMMMy;OMMnj1,Vtnj1l2n1t1tn;
13、tz;01nj1Nn1nj1ln1t上式可写为:vktatX2btNIt(2-20)上述讨论的是两个观测站于某一历元t同时观测nj颗卫星的误差方程组。当观测历元数为nt时,上述方程可以推广为如下形式:vtivt2MVtntatiat2MX2atntbtibt2MbtntNItiIt2MItnt(2-2i)上式可写为:VABX2L(2-22)N利用最小一乘法求解:X2AiAPABPLNBB(2-23)式中,P为单差观测量的权矩阵。2.3.3三差模型假设两个观测站Ti和T2于历元ti、t2分别同步观测了两颗卫星Sj和Sk,其中Ti为基准站,其坐标已知,Sj为参考卫星。根据三差观测方程(2-8)式,
14、则可得三差观测方程的线性化形式:式中:km2tkt2ktiX21y2-y22otikt2otijt|kl2tlkl2t2i2t1ktkm2t2m2t1kn2tkn2t2n2bk20tk20t2k20t1ktkt2kt1111j20tj20t2j20t1j1tj1t2j1t1由上式可得相应的误差方程:X2vkI,tkn2ty2lkt(2-24)y2式中:I;tk201ktj20当同步观测卫星数为nj时,以其中一颗为参考卫星,相应的误差方程可推广为:v1tv2tMnj1Vti2ti;tMl;j1tm;tm2tM1tm;1.n2tn2tMnjn2X2y2Z21112 Mtt(2-25)Inj1t上式
15、可写为:X2I(2-26)如果两观测站对同一组卫星nj同步观测了nt个历元,并于某一个历元为参考历元,则可将误差方程组(2-26)进一步推广,可写成:vt1at1It1vt2at2X2It2MMMvtq1atnt1Itnt1(2-27)或者(2-28)VAX2L由此可得相应的解:T1TX2ATPA1ATPL(2-29)式中,P为单差观测量的权矩阵。3.差分定位原理动态相对定位,是将一台接收机设置在一个固定的观测站(基准站T0),基准站在协议地球坐标系中的坐标是已知的。另一台接收机安装在运动的载体上,载体在运动过程中,其上的GPS接收机与基准站上的接收机同步观测GPS卫星,以实时确定载体在每个观
16、测历元的瞬时位置。在动态相对定位过程中,由基准站接收机通过数据链发送修正数据,用户站接收该修正数据并对测量结果进行改正处理,以获得精确的定位结果。由于用户接收基准站的修正数据,对用户站观测量进行改正,这种数据处理本质上是求差处理(差分),以达到消除或减少相关误差的影响,提高定位精度,因此GPS动态相对定位通常又称为差分GPS定位。动态相对定位过程中存在着三部分误差:第一部分是对每一个用户接收机所公有的,包括卫星钟误差、星历误差、电离层误差、对流层误差等;第二部分为不能由用户测量或由校正模型来计算的传播延迟误差;第三部分为各用户接收机所固有的误差,包括内部噪声、通道延迟、多路径效应等。利用差分技
17、术,第一部分误差完全可以消除,第二部分误差大部分可以消除,其主要取决于基准接收机和用户接收机的距离,第三部分误差则无法消除。在差分GPS定位中,按照对GPS信号的处理时间不同,可划分为实时差分GPS和后处理差分GPS。实时差分GPS就是在接收机接收GPS信号的同时计算出当前接收机所处位置、速度及时间等信息;后处理差分GPS则是把卫星信号记录在一定介质(GPS接收机主机、电脑等)上,回到室内进行数据处理,获取用户接收机在每个瞬间所处理的位置、速度、时间等信息。按照提供修正数据的基准站的数量不同,又可以分为单基准站差分、多基准站差分。而多基准站差分又包括局部区域差分、广域差分和多基准站RTK技术。
18、3.1 单基准站GPS差分根据基准站所发送的修正数据的类型不同,又可分为位置差分,伪距差分,载波相位差分。3.1.1 位置差分位置差分的基本原理是:使用基准站To的位置改正数去修正流动站T的位置计算值,以求得比较精确的流动站位置坐标。由于相对定位中基准站T0的坐标值预先采用大地测量、天文测量或GPS静态定位等方法精密测定,可视为已知的,设其精密坐标值为X0,Y0,Z0。而在基准站上的GPS接收机利用测码伪距绝对定位法测出的基准站坐标为X,Y,Z,该坐标测定值含有卫星轨道误差、卫星钟和接收机钟误差、大气延迟误差、多路径效应误差及其他误差。则可按照下式计算基准站的位置修正数:XX0XYY0Y(3-
19、1)ZZ0Z基准站采用数据链将这些改正数发送出去,而流动站用户接收机通过数据链实时接收这些改正数,并在解算时加入。设流动站T通过用户接收机利用自身观测的数据采用测码伪距绝对定位法测定出其位置坐标为Xi,Y,Zi,则可按照下式计算流动站Ti的较精确坐标Xi,Y,Zi:XiXiXYYiY(3-2)ZiZiZ由于动态用户T和GPS卫星相对于协议地球坐标系存在相对运动,若进步考虑用户接收机改正数的瞬时变化,则有:XiXitodYYttodtdZZttodtoXdtYY乙Z(3-3)式中,to为校正的有效时刻。位置差分的计算方法简单,只需要在解算的坐标中加进改正数即可,这对GPS接收机的要求不高,适用于
20、各种型号的接收机。但是,位置差分要求流动站用户接收机和基准站接收机能同时观测同一组卫星,这些只有在近距离才可以做到,故位置差分只适用于100km以内。3.1.2伪距差分伪距差分的基本原理:利用基准站To的伪距改正数,传送给流动站用户Ti,去修正流动站的伪距观测量,从而消除或减弱公共误差的影响,以求得比较精确的流动站位置坐标。设基准站To的已知坐标为Xo,Yo,Zo。差分定位时,基准站的GPS接收机,根据导航电文中的星历参数,计算其观测到的全部GPS卫星在协议地球坐标系中的坐标值Xj,Yj,Zj,从而由星、站的坐标值可以反求出每一观测时刻,由基准站至GPS卫星的真距离*:.222ojXjXoYj
21、YoZjZo(3-4)另外,基准站上的GPS接收机利用测码伪距法可以测量星站之间的伪距oj,其中包含各种误差源的影响。由观测伪距和计算的真距离可以计算出伪距改正数:jjj000(3-5)同时可以求出伪距改正数的变化率为:jj0d0t(3-6)通过基准站的数据链将0和d0发送给流动站接收机,流动站接收机利用测码伪距法测量出流动站至卫星的伪距ij,再加上数据链接收到的伪距改正数,便可以求出改正后的伪距:ijtijt0td0jtto(3-7)并按照下式计算流动站坐标Xit,Yt,乙t:.222ijtXjtXitYjtYtZjtZitcttVi(3-8)式中:tt为流动站用户接收机钟相对于基准站接收机
22、钟的钟差;Vi为流动站用户接收机噪声。伪距差分时,只需要基准站提供所有卫星的伪距改正数,而用户接收机观测任意4颗卫星,就可以完成定位。与位置差分相似,伪距差分能将两测站的公共误差抵消,但是,随着用户到基准站距离的增加,系统误差又将增大,这种误差用任何差分法都无法消除,因此伪距差分的基线长度也不宜过长。3.1.3载波相位差分位置差分和伪距差分能满足米级定位精度,已经广泛用于导航、水下测量等领域。载波相位差分,又称RTK技术,通过对两测站的载波相位观测值进行实时处理,可以实时提供厘米级精度的三维坐标。载波相位差分的基本原理是:由基准站通过数据链实时的将其载波相位观测量及基准站坐标信息一同发送到用户
23、站,并与用户站的载波相位观测量进行差分处理,适时地给出用户站的精确坐标。载波相位差份定位的方法又可分为两类:一种为测相伪距修正法,一种为载波相位求差法。(1)测相伪距修正法测相伪距修正法的基本思想:基准站接收机To与卫星Sj之间的测相伪距改正数0在基准站解算出,并通过数据链发送给流动站用户接收机T,利用此伪距改正数0去修正用户接收机T到观测卫星Sj之间的测相伪距ij,获得比较精确的用户站至卫星的伪距,再采用它计算用户站的位置。在基准站To和观测卫星Sj,则由卫星坐标和基准站已知坐标反算出基准站至该卫星的真距离为:2:2:20XjXoYjY)ZjZo(3-9)式中:Xj,Yj,Zj为卫星Sj的坐
24、标,可利用导航电文中的卫星星历精确的计算出;Xo,Y,Zo为基准站To的精确坐标值,是已知参数。基准站与卫星之间的测相伪距观测值为JopJaTJav0gO3式中:to和tj分别为基准站站钟钟差和卫星Sj的星钟差;0卫星历误差(包括SA政策影响);0,ip和o,T分别为电离层和对流层延迟影响;g和Vo分别为多路经效应和基准站接收机噪声。由基准站To和观测卫星Sj的真距离和测相伪距观测值,可以求出星站之间的伪距改正数:jj00另一方面,流动站jiojCtotj00,ipTi上的用户接收机同时观测卫星ijctitjjjii,Ipi,T0,Tm0V0(3-11)Sj可得到测相伪距观测值为:miV(3-
25、12)式中各项的含义与(3-10)相同。在用户接收机接收到由基准站发送过来的伪距改正数0时,可用它对用户接收机的测相伪距观测值ij进行实时修正,得到新的比较精确的测相伪距观测jijijij0titjtit0jijiji,Ipj0ji,Tji,ImiVij0,Ipctji,Ttjj0,T当用户站距基准站距离较小时(观测站对于同一颗卫星的星历误差、机与基准站的接收机为同型号机时,简写成:j0,Ip0,Tm0V0ViV0100km),则可以认为在观测方程中,两大气层延迟误差的影响近似相等。同时用户测量噪声基本相近。于是消去相关误差,可jji0ijctitf2.22rXjXiYjYzjZidmim2(
26、3-13)式中:d为各项残差之和。根据前述分析,历元ti时刻载波相位观测量为:jtiNijt0Nijtit0ijti(3-14)两测站T。、T同时观测卫星Sj,对两测站的测相伪距观测值取单差,可得:ij0jjt0ti0ii0iNijt0N0t0N;tjtN0tit0ijti0jti差分数据处理是在用户站进行的。上式左端的0j由基准站计算出卫星到基准站的精确几何距离0代替,并经过数据链发送给用户机;同时,流动站的新测相伪距观测量ij,通过用户机的测相伪距观测量ij和基准站发送过来的伪距修正数0来计算。也就是说,将(3-13)式带入(3-14)中,同时用0代oj,则有:2.2.XjXiYjYZjZ
27、idoNijtitoNotitoNjtoijtiiiN0to0ti(3-15)Sj的整周模糊度上式中假设在初始历元t。已将基准站和用户站相对于卫星Nijto计算出来了,则在随后的历元中的整周数N0tito、Nijtito以及测相的小数部分01、/ti都是可观测量。因此,上式中只有4个未知数:用户站坐标Xi,Y,Zi和残差d,这样只需要同时观测4颗卫星,则可建立4个观测方程,解算出用户站的三维坐标。从上面分析可见,解算上述方程的关键问题是如何快速求解整周模糊度。近年来许多科研人员致力于这方面的研究和开发工作,并提出了一些有效的解决方法,如FARA法、消去法等,使RTK技术在精密导航定位中展现了良
28、好的前景。(2)载波相位求差法(RTK)载波相位求差法的基本思想是:基准站To不再计算测相伪距修正数0,而是将其观测的载波相位观测值由数据链实时发送给用户站接收机,然后由用户机进行载波相位求差,再解算出用户的位置。假设在基准站To和用户站T上的GPS接收机同时于历元ti和t2观测卫星Sj和Sk,基准站To对两颗卫星的载波相位观测量(共4个),由数据链实时发送给用户站T。于是用户站就可获得8个载波相位观测量方程:ALk.1NJoTJaT,kkTT,k-L,Tk-L,对基准站To和用户站T在同一历元观测同一颗卫星的载波相位观测量相减,可得到4个单差方程:titititititotiNijtonot
29、oktitititititotiN-tot2t2tit2tot2Nijtonoto(3-i7)Nojtot2tit2t0NktoNoto单差方程中已经消去了卫星钟钟差,并且大气层延迟影响的单差是微小项,略去。将两接收机To和T上同时观测两颗卫星Sj、Sk的载波相位观测量的站际单差相减,可得到2个双差方程:2ktiiktitiijtikiikNotoNojtoNijtoNito2ktiiktitiijtijjNotoNojtoNijtoNito(3-i8)双差方程中消去了基准站和用户站的GPS接收机钟差t0、ti。双差方程右端的初始整周模糊度N0kt0、Nikt0、N0jt0、Nijt0,通过初
30、始化过程进行解算。因此,RTK定位过程中,要求用户所在的实时位置,因此它的计算程序是:I)用户GPS接收机静态观测若干历元,并接收基准站发送的载波相位观测量,采用静态观测程序,求出整周模糊度,并确认此整周模糊度正确无误。这一过程称为初始化。n)将确认的整周模糊度代入双差方程。由于基准站的位置坐标是精确测定的已知值,两颗卫星的位置坐标可由星历参数计算出来,故双差方程中只包含用户在协议地球系中的位置坐标Xi,Yi,Zi为未知数,此时只需要观测3颗卫星就可以进行求解。由上分析可见,测相伪距修正法与伪距差分法原理相同,是准RTK技术;载波相位求差法,通过对观测方程进行求差来解算用户站的实时位置,才是真
31、正的RTK技术。上述所讨论的单基准站差分GPS系统结构和算法简单,技术上较为成熟,主要适用于小范围的差分定位工作。对于较大范围的区域,则应用局部区域差分技术,对于一国或几个国家范围的广大区域,应用广域差分技术。3.2多基准站差分3.2.1 局域差分LADGPS在局部区域中应用差分GPS技术,应该在区域中布设一个差分GPS网,该网由若干个差分GPS基准站组成,通常还包含一个或数个监控站。位于该局部区域中的用户,接收多个基准站所提供的修正信息,采用加权平均法或最小方差法进行平差计算求得自己的修正数,从而对用户的观测结果进行修正,获得更高精度的定位结果。这种差分GPS定位系统称为局域差分GPS系统,
32、简称LADGPSLADGPS系统构成包括:多个基准站,每个基准站与用户之间均有无线电数据通信链。用户站与基准站之间的距离一般在500km以内才能获得较好的精度。3.2.2 广域差分WADGPS广域差分GPS的基本思想是对GPS观测量的误差源加以区分,并单独对每一种误差源分别加以模型化,然后将计算出的每种误差源的数值,通过数据链传输给用户,以对用户GPS定位的误差加以改正,达到削弱这些误差源,改善用户GPS定位精度的目的。GPS误差源主要表现在三个方面:星历误差,大气延迟误差,卫星钟差。广域差分GPS系统就是为削弱这三种误差源而设计的一种工程系统,简称WADGPS。该系统的一般构成包括:一个中心
33、站,几个监测站及其相应的数据通讯网络,覆盖范围内的若干用户。其工作原理是:在已知坐标的若干监测站上跟踪观测GPS卫星的伪距、相位等信息,监测站将这些信息传输到中心站;中心站在区域精密定轨计算的基础上,计算出三项误差改正模型,并将这些误差改正模型通过数据通信链发送给用户站;用户站利用这些误差改正模型信息改正自己观测到的伪距、相位、星历等,从而计算出高精度的GPS定位结果。WADGPS将中心站、基准站与用户站间距离从100km增加到2000km,且定位精度无明显下降;对于大区域内的WADGPS网,需要建立的监测站很少,具有较大的经济效益;WADGPS系统的定位精度分布均匀,且定位精度较LADGPS
34、高;其覆盖区域可以扩展到远洋、沙漠等LADGPS不易作用的区域;WADGPS使用的硬件设备及通信工具昂贵,软件技术复杂,运行维持费用较LADGPS高得多,且可靠性和安全性可能不如单个的LADGPS。3.2.3多基准站RTK多基准站RTK技术也叫网络RTK技术,是对普通RTK方法的改进。目前应用于网络RTK数据处理的方法有:虚拟参考站法、偏导数法、线性内插法、条件平差法,其中虚拟参考站法技术(VirtualRefereneeStation,简称VRS)最为成熟。VRSRTK的工作原理(参见图3-1):在一个区域内建立若干个连续运行的GPS基准站,根据这些基准站的观测值,建立区域内的GPS主要误差
35、模型(电离层、对流层、卫星轨道等误差)。系统运行时,将这些误差从基准站的观测值中减去,形成“无误差”的观测值,然后利用这些无误差的观测值和用户站的观测值,经有效的组合,在移动站附近(几米到几十米)建立起一个虚拟参考站,移动站与虚拟参考站进行载波相位差分改正,实现实时RTK。*基准站控制中心”沪f*FViff虚拟参考站”皇基准站基准站流动站%基准站图3-1VRSRTK工作原理由于其差分改正是经过多个基准站观测资料有效组合求出的,可以有效地消除电离层、对流层和卫星轨道等误差,哪怕用户站远离基准站,也能很快的确定自己的整周模糊度,实现厘米级的实时快速定位。多基准站RTK系统基本构成:若干个连续运行的
36、GPS基准站、计算中心、数据发布中心、用户站。连续运行的GPS基准站连续进行GPS观测,并实时将观测值传输至计算中心。计算中心根据这些观测值计算区域电离层、对流层、卫星轨道误差改正模型,并实时地将各基准站的观测值减去其误差改正,得到无误差观测值,再结合移动站的观测值,计算出在移动站附近的虚拟参考站的相位差分改正,并实时地传给数据发布中心。数据发布中心实时接收计算中心的相位差分改正信息,并实时发布。用户站接收到数据发布中心发布的相位差分改正信息,结合自身GPS观测值,组成双差相位观测值,快速确定整周模糊度参数和位置信息,完成实时定位。因此,VRSRTK系统是集internet技术、无线电通信技术、计算机网络管理和GPS定位技术于一身的系统。VRSRTK的出现将一个地区的测绘所有的工作连成了一个有机的整体,结束了以前GPS作业单打独斗的局面,大大扩展了RTK的作业范围,使GPS的应用更为广泛,精度和可靠性进一步提高,建设成本反而大大降低。目前Trimble公司成功地掌握了这一项技术,并于2000年正式推出了自己的VRS产品。感谢下载!欢迎您的下载,资料仅供参考
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
