 机械原理课程设计插床机构说明书
机械原理课程设计插床机构说明书

《机械原理课程设计插床机构说明书》由会员分享,可在线阅读,更多相关《机械原理课程设计插床机构说明书(13页珍藏版)》请在装配图网上搜索。
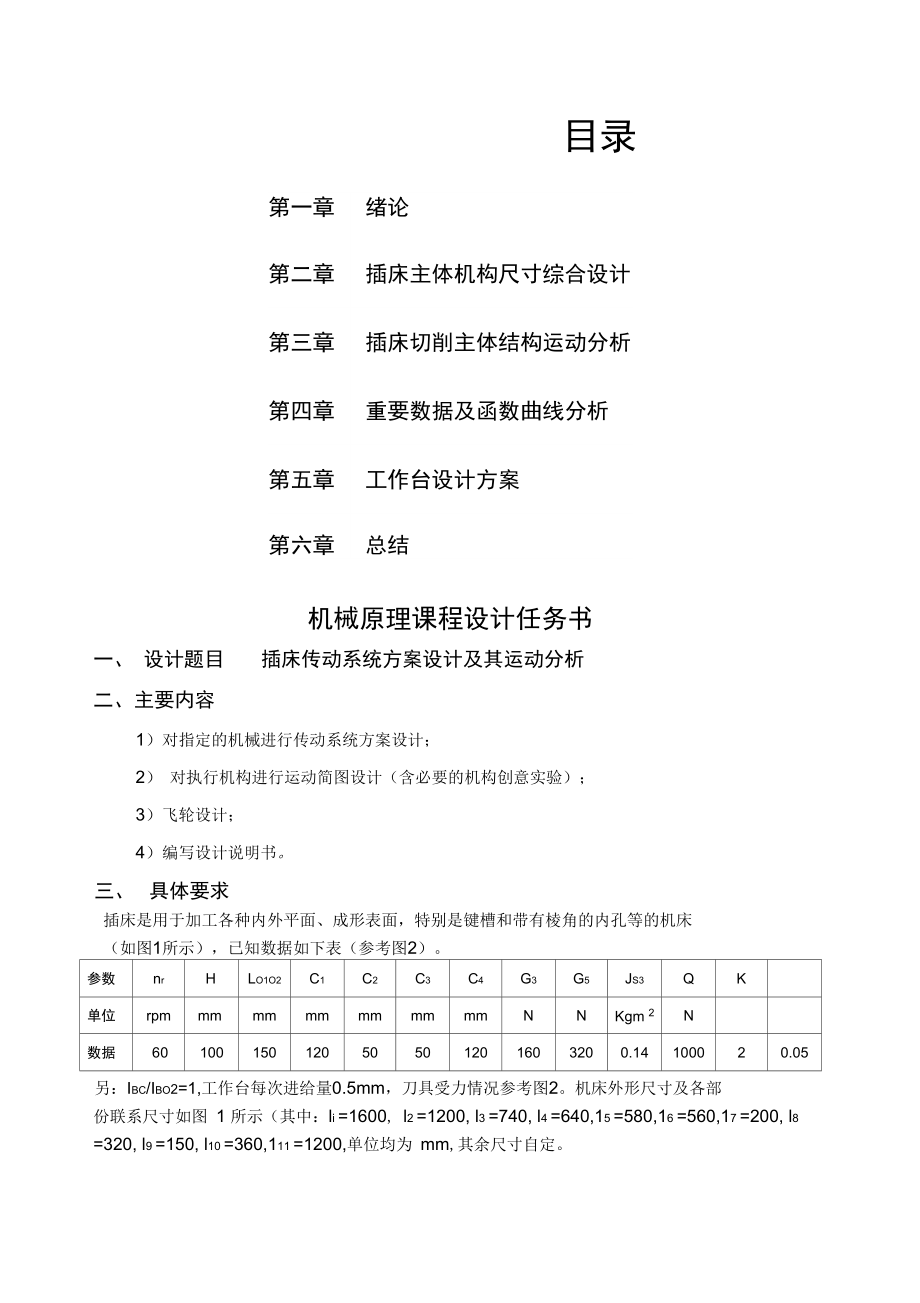
1、目录第一章绪论第二章插床主体机构尺寸综合设计第三章插床切削主体结构运动分析第四章重要数据及函数曲线分析第五章工作台设计方案第六章总结机械原理课程设计任务书一、 设计题目插床传动系统方案设计及其运动分析二、主要内容1)对指定的机械进行传动系统方案设计;2) 对执行机构进行运动简图设计(含必要的机构创意实验);3)飞轮设计;4)编写设计说明书。三、具体要求插床是用于加工各种内外平面、成形表面,特别是键槽和带有棱角的内孔等的机床 (如图1所示),已知数据如下表(参考图2)。参数nrHLO1O2C1C2C3C4G3G5JS3QK单位rpmmmmmmmmmmmmmNNKgm 2N数据6010015012
2、050501201603200.14100020.05另:Ibc/Ibo2=1,工作台每次进给量0.5mm,刀具受力情况参考图2。机床外形尺寸及各部 份联系尺寸如图 1 所示(其中:li =1600, l2 =1200, l3 =740, l4 =640,15 =580,16 =560,17 =200, l8 =320, l9 =150, l10 =360,111 =1200,单位均为 mm,其余尺寸自定。四、完成后应上交的材料1) 机械原理课程设计说明书;2) 一号图一张,内容包括:插床机构运动简图、速度及加速度多边形图、S () - 曲线、V( - 曲线和a ( ) - 曲线;3) 三号坐
3、标纸一张:Med ( )、Me r - 曲线;4) 一号图一张,内容包括:插床工作循环图、工作台传动方案图。五、推荐参考资料1) 机械原理课程设计指导书 (西华大学机械学院基础教学部编2) 机械原理(孙桓主编,高等教育出版社3) 机械原理较程 (孙桓主编,西北工业大学出版社指导教师签名日期年月日系 主 任审核日期年月日第二章插床主体机构尺寸综合设计机构简图如下:根据以上信息确定曲柄Oi代 BC,BO2长度,以及O2到丫丫轴的距离1.O1 A 长度的确定图 1 极限位置由K (1800 )/(180 ),得极为夹角:600,首先做出曲柄的运动轨迹,以 O1为圆心,O1A为半径做圆,随着曲柄的转动
4、,有图 知道,当O?A转到。2人,于圆相切于上面时,刀具处于下极限位置;当O?A转到O2A2,与圆相切于下面时,刀具处于上极限位置。于是可得到O2A1与O2A2得夹角即为极为夹角600。由几何关系知,A1O1O2A2O1O2 ,于是可得,A1O1O2A2O1O2 600。由几何关系可得:代入数据, O1O2=150mm,600,得即 曲柄长度为 75mm2.杆BC、BO2的长度的确定图 2 杆 BC, BO 2 长度确定由图2知道,刀具处于上极限位置C2和下极限位置O时,C1C2长度即为最大行程 H=100mm,即有 C1C2=100mm。在确 定曲柄长 度过程 中,我们 得到 A1O1O2A
5、2O1O2 600 ,那么可 得到B1O2B260,那么可知道三角形 B1B2O2等边三角形。又有几何关系知道四边形B1B2C2C1是平行四边形,那么B2B1 C2C1,又上面讨论知 B1B2O2为等边三角形,于是有B1O2 B2B1,那么可得到B2O2 100mm ,即BO2 100mm又已知 BC/BO21,于是可得即杆 BC,BO2的 100mm。3.02到丫丫轴的距离的确定対| 七I %图3 02到丫丫轴的距离有图我们看到,YY轴由y移动到河3过程中,同一点的压力角先减小,后又增大, 那么在中间某处必有一个最佳位置,使得每个位置的压力角最佳。考虑两个位置:1当丫丫轴与圆弧B2B1刚相接
6、触时,即图3中左边的那条点化线,与圆弧B2B1相切与B1点时,当B点转到B2,B!,将会出现最大压力角。2.当丫丫轴与B2B!重合时,即图中右边的那条点化线时,B点转到B1时将出现最大 压力角为了使每一点的压力角都为最佳,我们可以选取丫丫轴通过CB1中点(C点为O2BI与B2B1 得交点)。又几何关系知道:由上面的讨论容易知道 B2O2C 300 ,再代入其他数据,得:即02到丫丫轴的距离为93.3mm综上,插床主体设计所要求的尺寸已经设计完成。选取1:1的是比例尺,画出图形如图纸一上机构简图所示。第三章 插床切削主体机构及函数曲线分析主体机构图见第一张图。已知w 60r/m,逆时针旋转,由作
7、图法求解位移,速度,加速度。规定位移,速度, 加速度向下为正,插刀处于上极限位置时位移为 0.当 175O(1)位移在1:1的基础上,量的位移为79.5mm。,即曲柄转过175时位移为79.5mm。(2)速度由已知从图中可知,与0,A垂直,Va3A2与02A平行,Va3与O2A垂直,由理论力学中 不同构件重合点地方法可得其中,Va2是滑块 上与A点重合的点的速度,Va3A2是杆AOB上与A点重合的点相对于滑块的速度,Va3是杆AOB上与A点重合的速度。又由图知,Vb与O2B垂直,Vcb与BC垂直,Vc与YY轴平行,有理论力学同一构件不同 点的方法可得:其中,Vc是C点,即插刀速度,Vbc是C点
8、相对于B点转动速度,Vb是B点速度。又B点是杆件3上的一点,杆件3围绕02转动,且B点和杆件与A点重合的点在02的两侧,于是可得:由图量的 O2A3220 mm ,则可到由已知可得vA2 w 01A 275471mm/s,规定选取比例尺u 15mm s 1 /mm,则可的矢量图如下:最后量出代表vc的矢量长度为12mm,于是,可得Vc=0.174m/s即曲柄转过 175时,插刀的速度为 0.174m/s(3)加速度由理论力学知识可得矢量方程:其中,a2是滑块上与A点重合点的加速度,A2O1A4752957.88mm/s2,方 向 由 A4 指 向 O1A3A2是 科 氏 加 速 度A3A23
9、vA3A21080mm/s2 (其中 g ,VA3A2 大小均从速度多边形中量得),q方向垂直0?A4向下;3A2是A4相对于滑块 的加速度,大小位置,方向与0?A4平行;A3A2是C点相对于B点转动的向心加速度,*302 =vCb / BC 993.43mm/ s2,方向过由C指向B; A3O2是C点相对于B点转动的切向加速度,大小位置,方向垂 直BC。次矢量方程可解,从而得到A3 oB时杆 AOB上的一点,构 AOB围绕02转动,又A4与B点在0?的两侧,由t R, n2 R ( 是 角加速度)可得量出O2A4则可得到 a的大小和方向B又由理论力学 ,结合图可得到;其中,B在上一步中大小方
10、向都能求得;Cb是C相对于B点转动的向心加速度Cb vBc/BC 36mm/s2,方向由C点指向B点;Cb是C相对于B点转动的切向加速 度,大小未知,方向与BC垂直。次矢量方程可解,从而可得到 C点,即插刀的加速度。 取比例尺u 36mm s 2 / mm,可得加速度矢量图如下:最后由直尺量的ac长度为12mm,于是,可得ac 0.432m/s2当3550(1 )位移在1:1的基础上,滑块的位移为1.5mm。,即曲柄转过355时位移为1.5mm。(2)速度由已知从图中可知,VA2与01 A垂直,VA3A2与O2A平行,Va3与02 A垂直,由理论力学中 不同构件重合点地方法可得其中,VA2是滑
11、块 上与A点重合的点的速度,VA3A2是杆A0B上与A点重合的点相对于 滑块的速度,V*3是杆A0B上与A点重合的速度。又由图知,Vb与02B垂直,Vcb与BC垂直,Vc与丫丫轴平行,有理论力学同一构件 不同点的方法可得:其中,Vc是C点,即插刀速度,Vbc是C点相对于B点转动速度,Vb是B点速度。又B点是杆件3上的一点,杆件3围绕02转动,且B点和杆件与A点重合的点在02的两侧,于是可得:由图量的 O2A5 123.5mm ,则可到由已知可得 vA2 w O1A 2 75 471mm/ s ,规定选取比例尺 u 10m s 1 / mm ,则可 的矢量图如下:最后量出代表vC的矢量长度为2.
12、16mm,于是,可得:即曲柄转过355时,插刀的速度为0.0216m/s方向沿YY轴向上。(3)加速度 由理论力学知识可得矢量方程:其中,A2 为滑块上与 A 点重合点的加速度,2A2 =01 A22475 2957.88mm/ s2,方向由A5指向01;kA3A2是哥氏加速度,kA3A223vA3A22vA3vA3A2/02A5(其中 vA3 NA3A2大小均从速度多边形中量得),方向垂直0?A5向下;3A2是A3相对于滑块 的加速度,大小位置,方向与02 A5平行。B是杆A0B上的一点,杆 A0B围绕O2转动,又A5与B5点在O2的两侧,由 t R, n2R( 是 角加速度)可得量出O2A
13、5则可得到 B的大小和方向又由理论力学 ,结合图可得到;其中,B在上一步中大小方向都能求得;Cb是C相对于B点转动的向心加速度Cb vBc / B5C5 1.44mm/s2,方向由C点指向B点;Cb是C相对于B点转动的切向 加速度,大小未知,方向与 BC 垂直。次矢量方程可解,从而可得到 C 点,即插刀的加 速度。取比例尺u 50m s 2 /mm,可得加速度矢量图如下代入数据可得: ac 3.04m/s2 所有数据详见第四章表格 第四章 重要数据及函数曲线分析角度位移 S(mm)速度加速度V(m/s)a (m/s2)71.50.0032.051430.05522140.08251.96285
14、.90.1151.953580.1251.8429.90.1361.654910.50.141.55615.50.151.16319.50.1551.07023.50.160.8577250.180.7784300.1920.6391310.2010.559837.50.2070.15105410.2100.09112450.212-0.0211948.10.22-0.024126550.212-0.065133570.205-0.1214060.20.201-0.2314766.10.2-0.3215468.90.196-0.36161730.19-0.39168760.18-0.41757
15、9.50.174-0.432180830.172-0.45187850.17-0.59194900.140-0.7201920.13-0.7920892.50.126-0.9215950.093-1.04222980.073-1.522998.50.05-1.9236990.03-2.12524399-0.03-2.625098-0.07-3.1425797-0.16-3.326492.5-0.25-4.127190-0.274-5.1227883.5-0.383-5.128573-0.52-4.929266-0.574-1.7429954.2-0.62-0.4430641.5-0.613.6
16、31328.2-0.444.732017.9-0.435.232712.5-0.35.473348.1-0.235.53413-0.133.953482.6-0.0293.733553601.50-0.021603.042.251、 S( ) 图的分析:随着曲柄OiA,逆时针转动角度的增大,滑块 C位移由0开始增大,大约在240度时 达到最大,然后开始减少,易知滑块 C进程与回程时,曲柄OiA,转动的角度并不相等, 这说明了曲柄 O1A, 转动时存在急回运动。2、V( ) 图的分析 :随着曲柄OiA,逆时针转动角度的增大,即的增加,速度V正向增大,大约在120度时达到最大,然后呈现下降趋势,在
17、 240度时下降为 0,表明位移以增大到最大,即滑 块C达到最下端,由曲线看出,滑块 C的正向平均速度比负向平均速度小,进一步表明 了急回运动的存在。进程时,速度比较小,更有利于进刀;回程时,速度较快,有利于 提高工作效率,充分证明了此机构设计的合理性。下面对特殊点作一下分析:转角为 0度时,V=0;曲柄转动至120度,正向速度到达 最大值0.22m/s,此时滑块C具有最大速度,当曲柄继续转动至240度时正向速度减少至 0,此时由速度是位移的变化率可知,其位移达到最大值。当曲柄继续转动时,滑块C速度反向,变为负向速度,随着转角增大而增大,曲柄转至 240 度,速度达到负向最大值 0.63m/s
18、之后,当滑块继续由摇杆带动时,却曲柄由 300度转至360度时,其速度由负向 最大值变为 0.3、a( ) 图的分析:随着曲柄OiA,逆时针转动角度的增大,滑块C先向下作加速运动,但加速度越来越小, 但是加速度越来越小,然后反向增大知道位移达到最大,接着滑块进入空回程,由于存 在急回运动,加速度迅速正向增大,达到最大后又开始减小,直到滑块C进入工作行程。下面对一些特殊点进行分析:进程时,滑块 C 具有正向加速度,由 2.2开始减少,在 102度时达到 0,当角度继续增大时,加速度反向增大,大约在 240度时滑块位移达到最 大值,但是加速度还是在反向增大,而且增长率明显比前段更大,当角度达到 2
19、70 度时 加速度增大到5.2m/s2时到达峰值,开始减少,在300度左右是达到0,然后正向增长, 表明了滑块将要向上减速运动,最后回到 0 位移,然后往复运动。我们可以看出,在 0 至 240 度区间内,加速度都很平缓,而在 240 至 360 度内,加速度变化很快,都说明了 急回运动的存在。第五章 工作台传动方案设计此章的主要问题有三个 : 运动怎样从电动机引下来; 工作台的运动情况及相对位置; 怎样确定凸轮的安装角,怎样让整个机构协调工作。第一个问题:由于插床机身高度较高,所选择的机构传动方案必须能够实现长距离 传动,且保证定传动比,长距离传动方案多种多样,如:齿轮系传动;带传动;链传动
20、; 平行四边形机构传动等。 齿轮系传动会使整个机器结构变得复杂;带传动本身具有个缺点:会产生弹性滑动,且 其精度不高;链传动则会产生冲击,并伴随着很大的噪声;平行四边形机构传动效率高, 结构简单,完全复制了原动件的运动,且其刚度较高,故选取平行四边形机构这个方案 来进行长距离传动。第二个问题:工作台最终可实现前后、左右作间歇直线送进运动和作间歇回转送进 运动。送进运动必须与主切削运动协调配合,即进给运动必须在刀具非切削期时间即上 超阶段以内完成,以防止刀具的切削运动与工作台的送进运动发生干涉。 要实现工作台的三个间歇运动,即将原动件的连续往复摆动转化为从动件的单向间歇运 动,根据机构的这个运动
21、特性,知可选取棘轮机构,实现预期运动。同时,机构中添加 复合锥齿轮,可实现改变锥齿轮的旋转方向,从而改变工作台的运动方向;同时加上离 合器机构,以实现动力的传递或断开。这样,当机械运动传递到棘轮时,棘轮作有规律 的单向间歇运动,同时将摆动转化为沿轴的自转运动,再通过复合锥齿轮传递给工作台。 除了靠各机械构件带动工作台运动外,还可用手柄操作,此时与棘轮连接的离合器处于 断开状态,棘轮的运动及动力不继续传递,不影响手柄对工作台的操纵。 要保证送进运动与主切削运动协调配合,即进入上超工作台开始运动,结束上超工作台 停止运动,直到下一个上超阶段才重新运动,则必须保证推程运动角小于等于上超区间 的角度。
22、第三个问题:由于工作台的进给运动只能发生在上超阶段,故我们所选择的机构传 动方案中机构的运动只有在上超阶段才能传递给工作台,其它时间工作台都是处于静止 状态,故选择凸轮式间歇运动机构,同时为了保证机构协调工作,凸轮的安装角必须在 上超区间的角度范围内。图 工作台传动方案工作循环图:1. 工作台的循环: 工作台在刀具上下来回一周期间内只有上超阶段有进给运动, 其它时间 都处于静止。2. 刀具在一个周期内的工作方式: 刀具首先从上极限位置进入工作行程上超阶段, 通过上 超后刀具对工件进行切削,在刀具通过切削后进入工作行程下超,然后又经过回程下超、 空回行程及回程上超,经过一周。3. 工作循环图:工
23、作循环图第六章 总结通过这段时间的设计,我受益匪浅,不仅在学问方面有所提高,而且在为人处事方 面有了更多的认识。当我们遇到一个问题时,首先不能畏惧,而是要对自己有信心,相信通过自己的努 力一定能解决的。就象人们常说的在战略上藐视它。但是在战术上的重视它。通过慎重 的考虑认真的分析,脚踏实地去完成它,克服重重困难,当你成功实现目标时,那种成 就感一定会成为你成长的动力。这次设计的题目是插床。主要是确定机械传动的方案,通过凸轮机构到回杆机构, 回杆平行机构带动棘轮传动,再传到工作台,从而使工作台进行间歇进给运动,使刀具 能安全的进行切削。这次设计课程不仅让我加深了对机械原理理论课程的理解和认识,更培养了我用 理论知识去解决实际问题的能力。也许我的这种方案不是很好的方案,但它解决了工作 台间隙进给运动的问题。作为初次接触设计的我,对未来的设计充满了信心。我希望学校多开设这类的设计课程,不仅帮助我们理解理论知识,更重要的是让 我们学会用理论知识解决实际问题,帮助我们把理论知识转化成一种能力,让我们更容 易解决问题。1. 巩固理论知识,并应用于解决实际工程问题;2. 建立机械传动系统方案设计、机构设计与分析概念;3. 进行计算、绘图、正确应用设计资料、 手册、标准和规范以及使用经验数据的能力训练
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
