 机构的结构分析和综合
机构的结构分析和综合

《机构的结构分析和综合》由会员分享,可在线阅读,更多相关《机构的结构分析和综合(20页珍藏版)》请在装配图网上搜索。
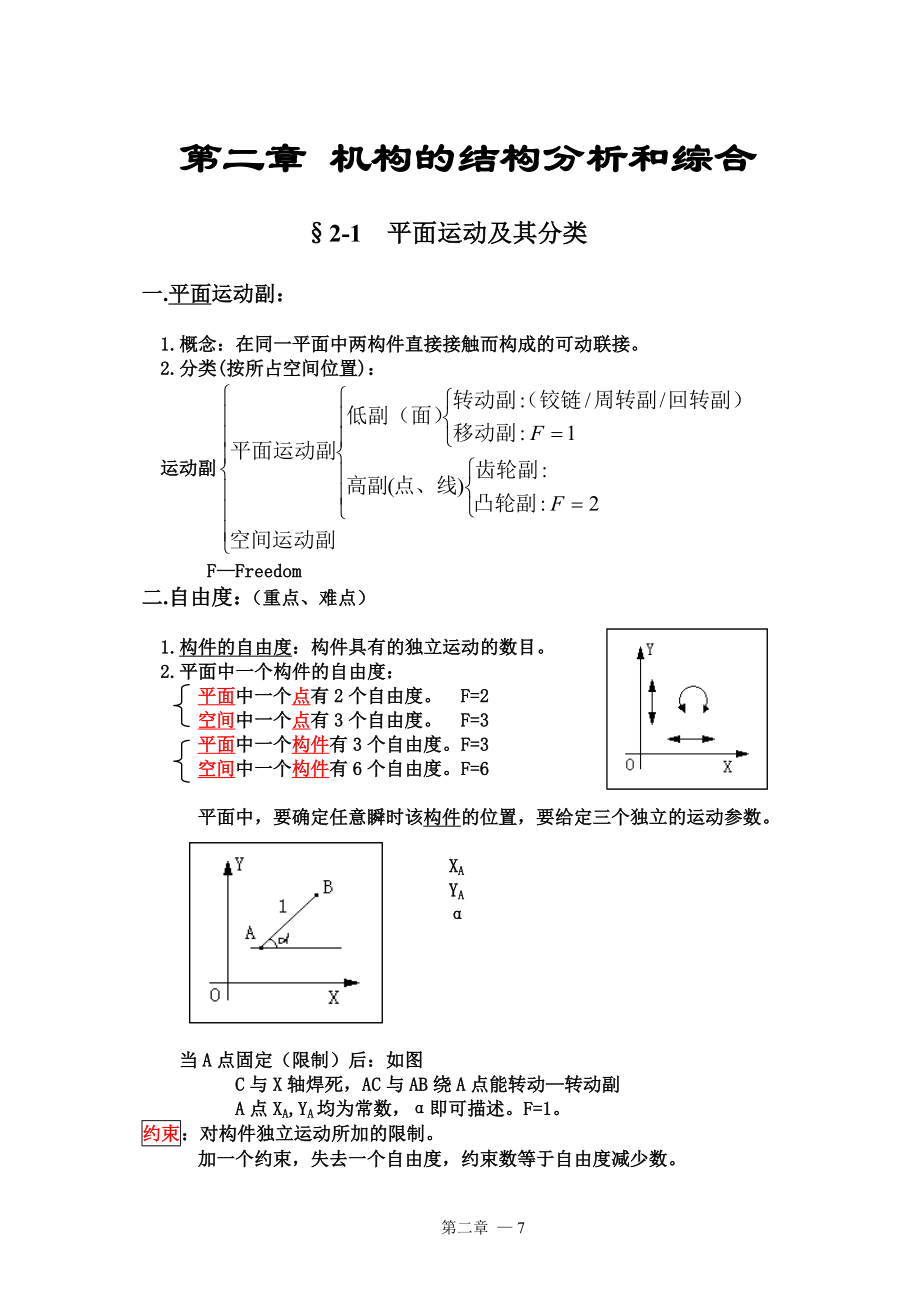
1、第二章 机构的结构分析和综合2-1 平面运动及其分类一.平面运动副:1.概念:在同一平面中两构件直接接触而构成的可动联接。2.分类(按所占空间位置):运动副 FFreedom二.自由度:(重点、难点)1.构件的自由度:构件具有的独立运动的数目。2.平面中一个构件的自由度:平面中一个点有2个自由度。 F=2空间中一个点有3个自由度。 F=3平面中一个构件有3个自由度。F=3空间中一个构件有6个自由度。F=6 平面中,要确定任意瞬时该构件的位置,要给定三个独立的运动参数。XAYA当A点固定(限制)后:如图C与X轴焊死,AC与AB绕A点能转动转动副A点XA,YA均为常数,即可描述。F=1。约束:对构
2、件独立运动所加的限制。 加一个约束,失去一个自由度,约束数等于自由度减少数。 A点:两约束 F=3-2=1。3.说明:平面运动副至少有一个自由度(即一个相对运动)所以,任何平面运动副最多只能引入两个约束。一个构件的自由度 F=3-约束数。一个低副引入两个约束,一个高副引入一个约束。(P8表2-1)按运动副所引入的约束数分:级副: 引入1个约束的运动副 级副:引入2个约束的运动副运动副 级副:引入5个约束的运动副电脑动画 2-2 平面机构运动简图 P9三一. 引入的目的:如内燃机、外形复杂,但其运动和外形无关,只与运动副及其相对位置有关。所以,用简单线条绘制出其主要特征,为研究提供方便。机构运动
3、简图与原机构具有完全相同的运动特征,可以根据运动简图进行分析。正确、简单、清晰为原则。照相、美术如:二. 常用机构运动简图符号: 机构1.在支架上的电机机构: 2.带传动机构:3.链传动机构:4.外啮合齿轮机构(P121表5-1):5.内啮合齿轮机构:(图4-2) 6.齿轮齿条传动机构:(图4-3) 7.圆锥齿轮传动机构:(图4-5)8.圆柱蜗杆传动机构:(图4-8) 9.凸轮传动机构:(p43图3-3) 10.棘轮机构:构件表示:1.杆、轴类构件:2.固定构件(机架):3.同一构件:4.两副构件:5.三副构件:三. 机构运动简图的绘制:1.绘制步骤:分析、选择、画运动副、连结、标注。 组成分
4、析:原动部分、工作部分、传动路线。 选择投影面和比例尺。 画运动副:A.转动副中心、B.移动副轨迹、C.高副廓线。 连接:用简单线条将各运动副联接起来。 标注:A、 构件用阿拉伯数字表示:原动件一般标为1,沿传动路线,依次为2,3,B、 转动副中心用大写英文字母表示:A、B、C、DC、 用箭头表示出原动件的运动方向:D、 写出比例尺或标出尺寸: 机构运动简图才完成。2.举例: 例一:(图3-1b)图示为一液压泵,该机构的原动件为偏心轴1,其几何轴线B绕固定轴线A作圆周运动,环状构件2空套在偏心轴1上,有相对运动。隔板3的下端呈圆弧状与构件2相铰接,通过隔板3将泵内液体空间分隔为、两腔。随着机械
5、运动,、两强的压力发生变化,从而形成吸液和排液过程。试绘制该液压泵的机构运动简图。 解: 组成分析:偏心轮1、圆环2、隔板3、机架4。 主动123 选择投影面和比例尺 图示, 画运动副:连接标注,按注意事项,画全例二(P11例2-1)作业:P22 习题2-32-3 平面机构的自由度计算(建立预习制)P11一. 平面机构的自由度:机构的自由度:机构所具有的独立运动的数目。也称为运动链相对于机构的自由度,简称运动链的自由度。F=3n-(2PL+PH)其中: F 机构的自由度;n 机构中活动构件的数目。(弹簧、机架不算机构中的基本构件)PL 低副数目, LlowPH 高副数目 Hhigh解释公式:3
6、n 一个三级构件有3个自由度,n 个活动构件有3n个自由度。2PL 一个低副引入两个约束,PL个低副引入2PL个约束。PH 一个高副引入一个约束,PH个高副引入PH 个约束即 F = 3n (2 PL+ PH)机构的自由度=总自由度数-总约束数例如(LH)()(LH)()(LH)()图。(LH)()二. 机构具有确定运动的条件:1.机构的原动件数等于机构的自由度数。2.机构的自由度数必须大于零。解释:四杆机构:F=1;原动件(1)只有一个时,具有确定运动。原动件(1)有两个解时,不可能运动,机构会破坏。五杆机构:F=2; 原动件只有一个时,运动不确定。 原动件有两个时,运动确定。桁(heng)
7、架:(LH)(LH) () - 静定 超静定三. 计算机构F时应注意的事项:1 复合铰链: 定义:由三个或三个以上的构件组成的轴线重合的转动副,称为复合铰链。转动副数: 由m个构件组成的复合铰链应含有m-1个转动副。 举例:求图示机构的自由度。解:如图 B、C、D、E处都是复合铰链。此四处转动副数均为2。 n=7PL=10 PH=0 12 2 2 2 1F=3n-(2PL+ PH)=3*7-(2*10+0)=12.局部自由度:(1) 定义: 与整个机构运动无关的个别构件的自由度称为局部自由度。(假想将其焊死) 实际的F:有一个原动件时运动确定F =1。计算的F:但F3 3(231) 2 与事实
8、不符。原 因:滚子绕其自身轴线转动的快慢并不影响整个机构的运动(只不过减小摩擦而已)(可假想将其与推杆3焊死).如图(2)F322211在滚子推杆机构中,在滚子处存在局部自由度,可假想将其与推杆焊死,再计算F.在计算机构的自由度时,应从自由度计算公式中将局部自由度减去。 F3n(2PL+PH)3.虚约束:定义:对机构的运动不起独立限制作用的约束称为虚约束。A. F3n(2PLPH)34(260)0B. 实际,原动件数为1时,F1C. 分析、比较 ABCD 铰链四杆机构平行四边形机构.F33241 ,与事实相符。计算F时,应减去虚约束(增加了一个约束构件,引入了三个自由度,但因增加了两个转动副而
9、引入四个约束,即引入一个约束).F3n(2PLPH) 为虚约束的个数F34(2601)1,与事实相符. 虚约束出现的情况:1)在机构中,如果用转动副联接的两构件上运动轨迹相重合的点,则该联接将带入1个虚约束。 如图:CAD90度AB=CB=BD转动副C(或D,B)带入一个虚约束.F3n(2PLPH)34(2601)1.2)在机构运动的过程中,若两构件上某两点之间的距离始终保持不变,则如用双转动副杆将此两点相联,也将带入一个虚约束.A) (a) (b) (c)(a)F34(2601)0=1;(b)F34(260)00 ;(c)F35271.B)平行四边形ABCD,E、F点.EFAD,双转动副构件
10、2带入1虚约束. F3n(2PLPH)34(2601)01 3)在机构中,某些不影响机构运动传递的重复部分所带入的约束称为虚约束. n=5 PL =5 (1处复合铰链 3-1=2) PH =6 =2F3n(2PLPH) 3562)014)在机构运动简图中,某两构件有时形式上构成两个或两个以上的移动副,但其导路互相平行时,实际上只有一个移动副起约束作用,其余的移动副应不考虑;如果两构件在多处接触而构成移动副,且移动方向彼此平行,则只能算一个移动副. 例: 5)如果两构件多处相配合而构成转动副,且转动轴线重合时,只能算一个转动副,实际只有一个转动副起作用。而其余形式上的转动副,应视为虚约束而不考虑
11、。6)如果两构件在多处接触而构成平面高副,且在接触点处的公法线彼此重合,则只能算一个平面高副。综合举例例一:求图示内燃机配汽机构的自由度?(弹簧不算构件)解: 复合铰链: 无; 局部自由度: 1; 虚约束: 去除。n7, PL9, PH1, 0, 1 F3n(2PLPH)37(2910)11列二:试计算图示某包装机送纸机构的自由度(图中EDFLGJ),并判断该机构是否具有确定的相对运动。解:复合铰链: D处(4,10,7) ,312.局部自由度:C、H两处, =2虚约束:8, =1n=9 , PL =11, PH =3, =1, =2F3n(2PLPH)39(21131)21自由度数与机构原动
12、件数相等,故该机构具有确定的相对运动.P16例 2-4解: F3n(2PLPH)38(21010)12四 空间机构自由度简述:6n2-4平面机构的组成原理和结构分析P17一. 机构的组成原理:(多杆机构更简单的机构)1 机构:将运动链中的一个构件固定为机架,当它的一个或几个原动件作独立的运动时,其余各构件随之作确定的相对运动的运动链或构件的组合。 机构机构具有确定运动的条件:原动件数=机构的自由度数(自由度F0)去掉机架和原动件,则余下的从动件系统的F=0 F32(23+00)-002. 基本杆组(阿苏尔杆组):最简单的、不可再分的、自由度为零的构件组。 基本杆组:F3n(2PLPH) 0平面
13、机构的组成原理:任何机构都可以看作是由若干基本杆组依次联接于原动件和机架上所组成的系统。 构件=原动件+机架+基本杆组当全为低副时(高副可高副低代)F3n(2PLPH) 0,Here, PH 0F3n2 PL0 .又n、PL均为整数,为的倍数,PL为3的倍数基本组合有:,PL;,PL;,PL;基本杆组.机构的级数(机构的级别):(在同一机构中可以同时包含不同级别的基本杆组),把机构中包含的基本杆组的最高级数称为该机构的级数。机构(按结构)二. 机构的结构分析:(确定机构的级别) 机架机构 原动件 组成级别 基本杆组步骤:1.求,确定原动件:原动件不同,机构级别可能不同。2.拆杆组:从远离原动件
14、处开始级(不行)级直到只剩级(每拆出一个杆组后,剩下的仍能组成机构,且 F不变)3.确定机构级别:最高 6P18例. :确定图示机构的级别;:当为原动件时机构的级别。解:.求F,确定原动件:F3n(2PLPH)()原动件。 .拆杆组: 剩剩由两个级一个级组成 F=33-24=1 F=31-21=1.确定级机构.当为原动件时。 F。原动件。 拆杆组:三. 平面机构的高副低代:(为瞬时代替)P19前面讨论的机构分析和运动分析只适合于低副机构,为使平面低副机构的结构分析和运动分析方法适合于含有高副的平面机构,可用高副低代:根据一点的约束条件将平面机构中的高副虚拟地用低副代替,称为高副低代。 原则:(
15、总原则:不改变机构特性)1)代替前后不变。2)代替前后运动状态不变(,).如:.图。 ) () F=1) 运动状态,不变。P20图2-18(瞬时) .关键:P20中找出构成高副的两轮廓曲线在接触点处的曲率中心,然后用一个构件和位于两个曲率中心的两个转动副来代替该高副。若两轮廓之一为直线,则转动副移动副(图2-19);若两轮廓之一为一点(R0),点的曲率半径等于0,如图2-20。图2-19 图2-20平面机构的结构综合一. 结构综合(设计):根据机构的输入特性和输出特性的要求设计机构运动简图的过程,称为结构综合。如:输入电动机的匀速圆周运动(转动)。输出非匀速往复直线运动(平动)。或图2-5,牛
16、头刨床、齿轮齿条、直动凸轮机构、带传动、链传动等。 同一要求,可以有多种机构形式实现优选二.型综合(结构综合):按机构特性的要求选择机构型式。单开链叠加法基本杆组叠加法:根据机构的组成原理,综合平面机构时,如果没有虚约束,则只需往原动件和机架(级构件)上联接自由度等于的基本杆组。综合机构级机构基本杆组。1当时(即当与级机构联接的构件数为时):只有一个从动件的机构。移动从动件凸轮机构:摆动从动件凸轮机构(或一对凸轮传动)2.当时(即当与级机构联接的构件数为时):仅讨论没有高副时,否则解较多。此时机构只能包含一个级基本杆组(共种表,两杆三副)。图共五种。思 考 题2.1何谓运动副?何谓高副和低副?
17、答:运动副:两构件直接接触而构成的可动联接称为运动副。高副:两构件通过点或线接触构成的运动副称为高副。低副:两构件通过面接触,只能沿一个方向移动的运动副称为低副。2.2 何谓自由度?约束?约束数和自由度的关系如何?平面低副和高副各有几个约束?约束一个转动而保留两个移动的运动副是否存在?为什么?答:自由度:构件具有的独立运动的数目。约束:对构件独立运动所加的限制。构件上每增加一个约束,便失去一个自由度,约束数就是自由度的减少数。低副两个约束高副一个约束F3n(2PLPH)转动副移动副高副不存在,找不到。2.3 何谓机构运动简图?有何实际意义?答:用简单的线条和符号按一定的比例表示构件相对运动关系
18、的简单图形,称为机构运动简图。简单,方便。与真实机构具有完全相同的运动特征,它不仅能充分表示出机构的传动原理,而且还能解出机构上个点位移、速度、加速度。2.4 由实际机械绘制运动简图的步骤如何?应注意一些什么问题?答:.组成分析;.选择投影面和比例尺;.画运动副;.联接。.构件用阿拉伯数字表示;.转动副中心用大写英文字母表示;.用箭头标出原动件的运动方向;.标出比例尺或标出尺寸。2.5 何谓构件的运动特征尺寸?答:与外形无关,只与运动副的类型及运动副的相对位置有关的尺寸。2.6 何谓运动链?他与机构的关系如何?答:若干构件与运动副联接而构成的系统称为运动链。具有确定相对运动的运动链称为机构。2
19、.7 何谓机构的自由度?何谓原动件?答:自由度:机构具有独立运动的数目。原动件:机构中运动规律已知的构件,它一般与机架相连。2.8 运动链具有确定的相对运动的条件是什么?答:原动件数等于自由度数。自由度数大于零2.9何谓复合铰链、局部自由度和虚约束?在计算平面机构的自由度时,应如何处理这些问题?答:复合铰链:由三个或三个以上的构件组成的轴线重合的转动副。局部自由度:与整个机构的运动无关的个别机构的自由度。虚约束:对机构的运动不起独立限制作用的约束。1-10 在一般情况下一构件能否同时与另一构件构成两个或两个以上的运动副?如果两构件同时构成两个或两个以上的移动副或转动副而又能产生相对运动时,则应
20、具备什么条件?答:不能。习 题2.1 如图所示的颚式破碎机,当偏心轴(原动件)绕固定轴线O1连续回转时,动颚板绕固定轴线O往复摆动。试绘制其机构运动简图。求? 解:,F3n(2PLPH) ().2.2 如图所示的回转式柱塞泵,当原动件绕固定轴线转动时,轴心随同原动件作圆周运动,活塞绕机架上的某一固定轴线转动。试绘制机构的运动简图,并计算自由度。 解:,F3n(2PLPH) ().2.3 计算下列运动链的自由度,并判定他们是否具有确定的相对运动(图中画箭头的构件为原动件)。 F3n(2PLPH) F3n(2PLPH) 35(2700)0 37(210+00)0 1 1 F36(281)1 310
21、(21320)112.4 试计算图示小型压力机的自由度。 F38(21020)11As of Microsoft Internet Explorer 4.0, you can applmultimedia-style effects to your Web pages using visual filters and transitions. You can apply visual filters and transitions to standard HTML controls, such as text containers, images, and other windowless o
22、bjects. Transitions are time-varying filters that create a transition from one visual state to another. By combining filters and transitions with basic scripting, you can create visually engaging and interactive documents.Internet Explorer 5.5 and later supports a rich variety of optimized filters.
23、Click the following button to see a demonstration of many of these filters and how to usetheProcedural surfaces are colored surfaces that display between the content of an object and the objects background. Procedural surfaces define each pixels RGB color and alpha values dynamically. Only the proce
24、dure used to compute the surface is stored in memory. The content of an object with a procedural surface applied is not affected by the procedural surface.警告:此类已序列化的对象将不再与以后的 Swing 版本兼容。当前的序列化支持适合在运行相同 Swing 版本的应用程序之间短期存储或 RMI。从 1.4 版开始,已在 java.beans 包中加入对所有 JavaBeansTM 的长期存储支持。请参见 XMLEncoder。引用类型和原
25、始类型的行为完全不同,并且它们具有不同的语义。引用类型和原始类型具有不同的特征和用法,它们包括:大小和速度问题,这种类型以哪种类型的数据结构存储,当引用类型和原始类型用作某个类的实例数据时所指定的缺省值。对象引用实例变量的缺省值为 null,而原始类型实例变量的缺省值与它们的类型有关。当JAVA程序违反了JAVA的语义规则时,JAVA虚拟机就会将发生的错误表示为一个异常。违反语义规则包括2种情况。一种是JAVA类库内置的语义检查。例如数组下标越界,会引发IndexOutOfBoundsException;访问null的对象时会引发NullPointerException。另一种情况就是JAVA允许程序员扩展这种语义检查,程序员可以创建自己的异常,并自由选择在何时用throw关推动了Web的迅速发展,常用的浏览器现在均支持第二章 26
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
