 超精密三坐标测量仪整机机构毕业设计(全套图纸)
超精密三坐标测量仪整机机构毕业设计(全套图纸)

《超精密三坐标测量仪整机机构毕业设计(全套图纸)》由会员分享,可在线阅读,更多相关《超精密三坐标测量仪整机机构毕业设计(全套图纸)(37页珍藏版)》请在装配图网上搜索。
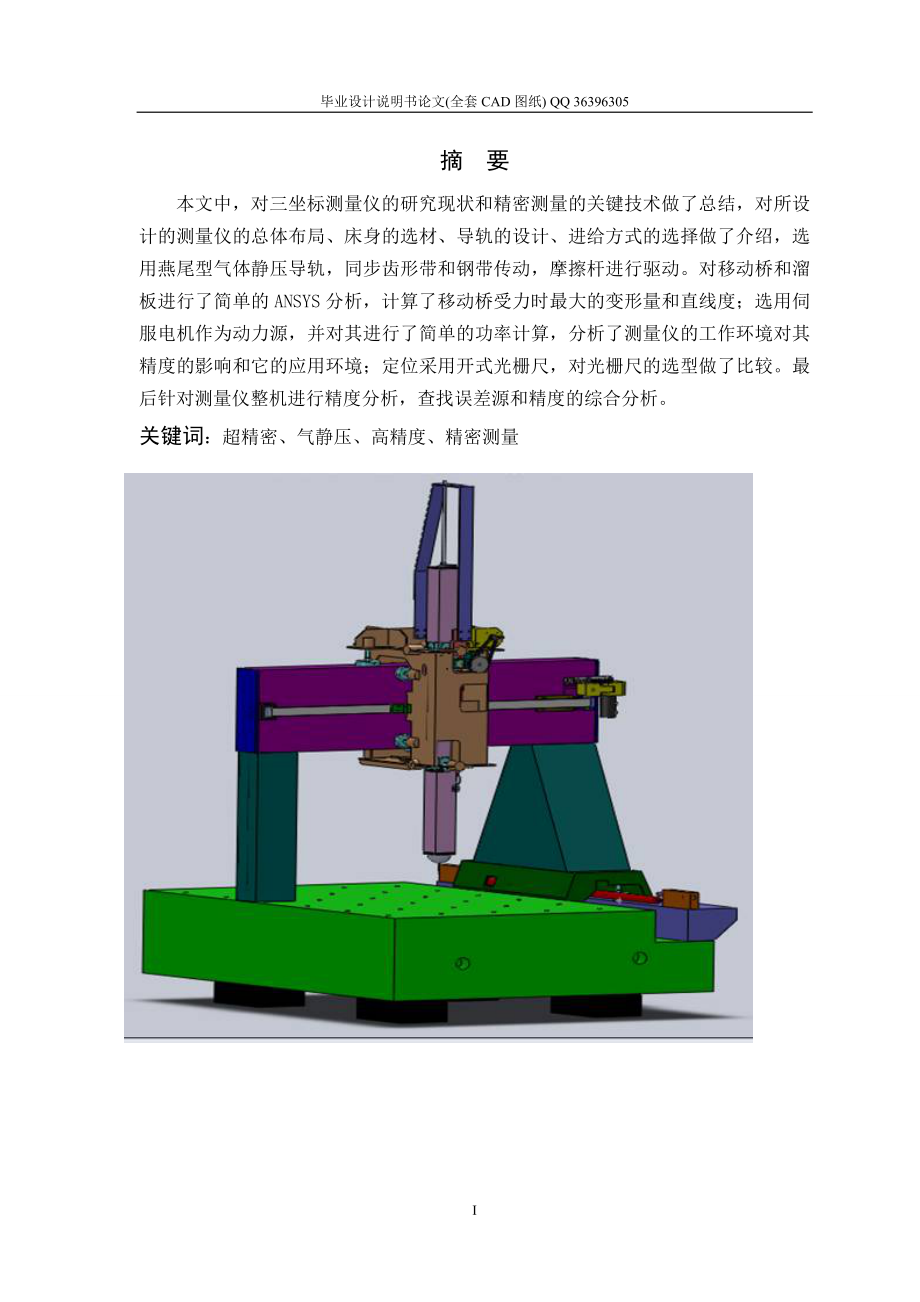
1、毕业设计说明书论文(全套CAD图纸) QQ 36396305 摘 要本文中,对三坐标测量仪的研究现状和精密测量的关键技术做了总结,对所设计的测量仪的总体布局、床身的选材、导轨的设计、进给方式的选择做了介绍,选用燕尾型气体静压导轨,同步齿形带和钢带传动,摩擦杆进行驱动。对移动桥和溜板进行了简单的ANSYS分析,计算了移动桥受力时最大的变形量和直线度;选用伺服电机作为动力源,并对其进行了简单的功率计算,分析了测量仪的工作环境对其精度的影响和它的应用环境;定位采用开式光栅尺,对光栅尺的选型做了比较。最后针对测量仪整机进行精度分析,查找误差源和精度的综合分析。关键词:超精密、气静压、高精度、精密测量
2、I ABSTRACTIn this paper, three coordinates measuring instrument for precision measurement, the research present situation and the key technology of summing up, the design of measuring instrument lathe bed of the general layout, the design of the selection of materials, guide rail, into to the choice
3、 of the ways of doing introduced, choose coattails type aerostatic guide rail, synchronous cog belt and steel belt transmission, friction lever driven. Slip board of mobile bridge and the simple ANSYS analysis method, the largest mobile bridge when stress deformation and straightness; Choose servo m
4、otor as a power source, and analyses the simple power calculation, analyzes the working environment of measuring apparatus to the precision of the influence and its application environment; The positioning of grating open grating feet, comparison of the selection of the feet. Finally, according to t
5、he measuring apparatus for precision analysis, find the error sources and precision of the comprehensive analysis. Keywords: The ultra precision, Gas static pressure, High accuracy, Precision measurement II毕业设计说明书论文(全套CAD图纸) QQ 36396305 目 录1 绪 论21.1 课题的来源21.2 课题的意义21.3 精密测量的研究现状21.4 精密测量的关键技术62 超精密三
6、坐标测量仪整机机构介绍82.1 总体布局82.2 床身材料选用92.3 导轨的设计102.4 进给传动方式的选择142.5 测量仪整体结构设计162.6 测量仪的工作原理173 测量仪的主要零部件的设计183.1 移动桥的设计183.2 溜板的设计193.3 电机选型213.4 环境控制平台253.5 光栅尺的选型264 测量仪精度分析274.1 测量仪误差源274.2 测量仪精度分析295 结束语32参考文献33致 谢341 绪 论1.1 课题的来源为了响应教育部的号召,实施大学本科教改计划,北京微纳精密机械有限公司与中原工学院联合实施“卓越工程师”的培养计划。由该公司接收中原工学院大四学生
7、来公司实习并完成毕业设计,为学生走上工作岗位提供一个锻炼自己的平台。本课题来自北京微纳精密机械有限公司,在学校和公司的商讨后,确定了我的课题:超精密三坐标测量仪整机机构设计。1.2 课题的意义本课题研制的超精密三坐标测量仪具有重要意义:一方面将促进超精密光学、机械制造技术快速发展,填补我国相应领域的技术空白;另一方面将提高我国产品质量和市场竞争力以及我国测量仪器的性价比水平。1.3 精密测量的研究现状精密测量技术和装置是先进制造主要支撑技术之一,体现国家工业与科技水平。国民经济和先进制造的不断发展对精密测量提出了新的要求,因此,提高精密测量水平,对提升我国先进制造能力,促进国民经济发展具有重要
8、意义。随着近20年科学技术的迅速发展, 对仪器精度要求出现了数量级的变化。从精密测量(0.5m0.05m),发展到超精密测量(0.05m0.005m), 近年来又提出纳米精度测量(5nm 0.05nm)的要求。据专家们的推测,随着精密工程技术、尖端科技和空间技术的迅猛发展,轮廓形状允差为50nm5nm,尺度允差为100nm10nm的超精密零件将被广泛使用,所以超精密测量技术和仪器工程的研究与应用已成为科学技术发展的关键因素之一。当今世界上超精密三坐标测量仪在质量和性能方面首推德国ZEISS公司(即原西德OPTON公司)和LEITZ公司。到目前为止ZEISS已有多项专利技术,从而使ZEISS公司
9、在坐标测量技术上远远领先于其它公司。其生产的三坐标测量仪既有桥式测量仪,也有龙门式、悬臂式测量仪,既有生产型测量仪,也有计量型测量仪。在国内ZEISS三坐标测量仪在航空、航天、汽车、电子、机械等多个行业中得到广泛地使用。图1-1是ZEISS最新的DuraMax三坐标测量仪系列,代表着当今测量仪行业的尖端技术。图1-1 DuraMax三坐标测量仪德国LEITZ公司凭借其在高精度测量领域积累的世界级测量技术以及丰富的应用理论知识,通过高性能,高精确度的PMM-C三坐标测量仪与功能强大的工业级计量软件QUIND-OS的结合,不断解决来自工业各个领域的高精度和复杂几何形状的计量需求。LEITZ主要从事
10、研制、开发、制造超高精度坐标测量仪,包括在世界高精度三坐标测量仪的发展历史上具有里程碑意义的PMM机型。其动态指标分别为最大测量加速度3000mm/s或最大测量速度400mm/s,平均触测频率40点/秒。图1-2为LEITZ最新的三坐标系列reference测量仪系列,和ZEISS的DuraMax三坐标测量仪系列一样,在全球三坐标行业中,隶属最尖端技术。表1-1为reference测量仪系列的部分参数。图1-2 reference测量仪 表1-1 reference测量仪系列参数机型(x.y.z)(100mm)E(m)P(m)THP(m)Vmax(mm/s)a max(mm/s2)Refere
11、nce 10-7-6 0.9+L/3501.01.9/45s5203300Reference 15-9-7 0.9+L/3501.01.9/45s5203300Reference 20-10-70.9+L/3501.01.9/45s5203300Reference 22-12-9 1.5+L/3501.52.1/45s5203300Reference 30-12-9 1.7+L/3501.52.1/45s5203300Reference 45-12-9 1.7+L/3501.52.1/45s 5203300意大利DEA公司也是世界著名的三坐标测量仪的生产商之一。该公司生产的三坐标测量仪,主要使
12、用对象大多数是与汽车产品相关的生产厂家。国内许多大型企业都订购了该公司的三坐标测量仪,目前,世界上为汽车行业车身检测提供专业检测方案的最知名厂家当属意大利DEA公司,并在推动汽车车身研究和“白车身”的尺寸检测方面作出了突出贡献。三丰公司也是著名的测量仪生产厂家,目前,己累计向世界提供了33000台三坐标测量仪,占世界测量仪市场份额的35%,雄踞三坐标测量仪世界第一供应商的位置。经过不断改进和发展,已开发出现在的高速高精度三坐标测量仪,如Crysta-Apex系列和MACH、LEGEX等新型机种。其他世界上较有名的坐标测量仪制造厂商有Brown-sharp公司,英国的ZX公司、LK公司等。我国坐
13、标测量仪发展过程可分为三个阶段:第一阶段自上世纪70年代开始至80年代初。由于该技术密集度高,特别受我国计算机技术落后的严重影响,致使研究和生产总是处于样机试制阶段,第二阶段自上世纪80年代开始至80年代末,随着改革开放的政策实施,我国三坐标测量仪的研制工作一改过去封闭状况,走上了引进国外先进技术,结合自身特点进行开发生产,加快我国三坐标测量仪生产的步伐,初步形成了国产测量仪的生产能力。第三阶段为进入上世纪90年代至今。目前我国已具备了从生产精密型测量仪到生产型测量仪各种型号的三坐标测量仪的能力,开始占领国内市场。1982年北京机床研究所研制出第一台CLW63型万能测量仪。同年国内率先研制出带
14、气浮导轨的CLZ864型手动三坐标测量仪。北京航空精密机械研究所(原航空部第三O三研究所)从1972年开始研制三坐标测量仪,1978年三坐标测量仪商品化是国内第一家生产测量仪的企业,至今己有十种不同系列品种的测量仪。如CIOTA桥移动式测量仪、SZC一J866桥固定式高精度测量仪、XB654手动悬臂式测量仪、TS654手动式数控测量仪、LZ立柱式测量仪、LM龙门式测量仪、CENTURY世纪型测量仪、ORIENT东方型测量仪、PEARL甩珍珠型测量仪、FUTURE未来型测量仪等。近几年来,随着数据检测技术研究的深入,国内测量仪得到了进一步的发展。目前,在国内测量仪厂家中,海克斯康测量技术(青岛)
15、有限公司拥有产品系列最多,测量精度较高。海克斯康测量技术(青岛)有限公司是世界级数控三坐标测量仪专业制造厂商,是瑞典高科技制造业集团HEXAGON与中国航空工业第二集团公司下属青岛前哨精密机械公司共同投资在中国组建的国际化合资公司。海克斯康公司的前身是青岛前哨精密测量技术有限公司(Brown-shorpe前哨)。其与享誉全球的坐标测量仪制造公司Brown-shorpe前哨公司、意大利DEA公司、德国LEITZ公司、瑞典CE JOHNASSAN公司并列,同属HEXAGON集团计量产业的核心成员和五大测量仪制造基地之一。海克斯康所提供的测量仪产品在汽车工业、航空航天,机床工具、国防军工、电子和模具
16、等领域得以广泛应用,产品系列包括: 活动桥式测量仪、固定桥式测量仪、龙门测量仪、水平臂式测量仪、悬劈式测量仪其中以1997年推出的Z003系列活动桥式测量仪为典范。该种测量仪系中小型测量仪系列,属于高速度、高精度生产型测量仪,测量速度是固定桥式测量仪的两倍。这种测量仪在生产在线测量应用最为广泛。该种测量仪的技术水平达到国际同类中小型测量仪的水平。与国外测量仪厂家的发展相比,国内的发展就显得很慢,远远不能适应国家重点行业技术改造和市场发展的需要,无论从技术实力还是市场开拓方面均大大落后于国外测量仪厂家。1.4 精密测量的关键技术1.4.1 直线导轨总的来说,从精度角度看,空气导轨是现在最好的导轨
17、。虽然它没有液体静压导轨的刚性大,但气浮导轨优点也很明显,如无需进行油温控制,对环境没有污染。此外,纳米级精度仪器的负荷和行程没有那么大,所以应优先考虑空气导轨。目前空气导轨的直线度可达(0.10.2)m/250mm的水平,国内303所也可做到0.1m/200mm5。纳米水平的仪器导轨行程比上述要短,通过补偿技术还可进一步提高导轨的直线度,国防科技大学利用二维微进给装置补偿导轨直线度,取得了较好的效果,可补偿到0.1m/300mm的精度水平。在导轨的结构设计上还有潜力可挖,如采用多根导轨并联来加强气膜的误差匀化作用,加大气垫式导轨跨度来缩小直线度误差等。由于空气导轨的气膜厚度大概只有10m左右
18、,在使用过程中防尘显得很重要,若不保证洁净的环境,导轨有可能因为灰尘而受损伤,这种损伤常常是难以修复的。1.4.2 传动系统传统的传动方法为滚珠丝杠传动,精密仪器一般用C0级滚珠丝杠,利用闭环控制目前最高可达到0.01m的定位精度。利用滚珠丝杠的微小弹性变形原理,也可实现纳米分辨率的进给,但在进行非球面等轮廓曲线跟踪时,滚珠丝杠的精度及其在运动中的微小振动都会对系统的静态特性与动态特性产生影响。国防科技大学利用微进给系统补偿轮廓误差,在对半径为50 mm的圆进行跟踪试验时,跟踪定位精度可达0.033m。静压丝杠的丝杠和螺母不直接接触,有一层高压膜相隔,所以没有摩擦引起的爬行和反向间隙,而且可以
19、长期保持精度,进给分辨率也会更高。由于介质膜(油、空气)有匀化作用,可以提高进给精度,在较长行程上,可以达到纳米的定位分辨率。目前的空气静压丝杠分辨率可达到0.01m,进给精度比C0级丝杠高2个数量级。但它的刚度比较小,直径25mm,导程为10mm的空气静压丝杠,刚度可达到50N/m。摩擦驱动可以实现无反向间隙的传动,由于结构上比较简单,因而弹性变形因素大为减少,所以一直被认为是一种非常适合精密的传动系统。一般的摩擦驱动机构的结构和齿轮齿条相似,可以把电机的回转运动直接转换为直线运动。英国Rank Tailor Hobson公司开发的Nanoform 600精密镜面仪器的进给机构采用了这种装置
20、,300mm的行程上可获得1.25nm分辨率,0.1m的定位精度。最近,由国防科技大学设计的一种扭轮摩擦传动系统,模拟丝杠的传动原理,大大提高了系统的进给分辨率。从原理上说,利用分辨率为六万分之一转的电机驱动,系统可达0.1nm级水平的进给分辨率。1.4.3 尺寸测量技术尺寸测量技术在精密领域尺寸测量主要有2种技术:一是激光干涉技术,二是光栅技术。激光干涉仪分辨率高,最高可达0.3nm,一般为1.25nm;测量范围大,可达几十米;测量精度高,日本和美国的使用精度都可到0.210-6,但使用困难,特别是高精度测量,激光波长受温度、湿度、压力的影响比较大,因此使用过程中对环境要求很苛刻。近年来精密
21、领域越来越多地选用光栅作为测量工具。从分辨率上看,HEIDENHAIN的LIP382型开启式直线编码器可达1nm,俄罗斯的全息光栅系统达10nm,北京光电量仪研究中心的光栅系统分辨率可达0.1nm;从测量长度看,LIP382型光栅尺测量范围70mm,分辨率为5nm的LIP401型测量长度可达220mm;精度上,HEIDENHAIN的LIP401的准确度为0.2m(ML220 mm),0.1m(ML100mm),俄罗斯的全息光栅精度是0.1m,LG100光栅系统分辨率可达0.1nm,测量范围100 mm,精度0.01m,8。单从分辨率和精度上看,光栅技术可以和激光干涉技术相媲美,对环境的要求相对
22、较低,可以满足纳米精度的使用要求,特别是相位光栅,是一种非常有前途的精测量工具。352 超精密三坐标测量仪整机机构介绍2.1 总体布局三坐标测量仪是近三十年发展起来的一种高效率的新型精密测量仪器。它以精密机械为基础,综合电子技术、数控技术、计算机技术以及精密位移技术为一体的高技术、高精度、高效率的精密仪器,并广泛用于机械制造的检测、电子、汽车和航空航天等工业中。可以进行零件和部件的尺寸、形状及相互位置的检测,例如箱体、导轨、蜗轮和叶片、缸体、凸轮、齿轮、形体等空间型面的测量。此外,还可用于画线、定中心孔、光刻集成电路等,并可对连续曲面进行扫描及制备数控机床的加工程序等。由于它的通用性强、测量范
23、围大、精度高、效率高、性能好、能与柔性制造系统相连接,已成为一类大型精密仪器,有“测量中心”之称。我这次设计的超精密三坐标测量仪总体布局如图2-1所示。结构整体为移动桥式结构,这种结构简单、紧凑、刚度好,具有较开阔的空间。工件安装在固定的工作台上,承载能力较强,工件质量对测量仪的动态性能没有影响;工作台采用人造花岗岩材料,其主要优点是变形小、稳定性好、不生锈,易于作平面加工,易于达到比铸铁更高的平面度,适合制作超精密的平台;横梁和Z轴采用陶瓷材料,在保证所需要的刚度的同时,减少了本身的重量,保证测量仪的测量精度;X向、Y向、Z向均采用气体静压导轨,使测量仪在运动时有足够的精度;X向、Z向采用摩
24、擦杆驱动,Y向采用刚带传动。图2-1 三坐标测量仪总体布局图其主要技术指标要求如下:1)X轴,最大行程:800 mm,直线度:0.2 m/100 mm,光栅反馈分辨率:0.1m;2)Y轴,最大行程:600 mm,直线度:0.2 m/100 mm,光栅反馈分辨率:0.1m;3)Z轴,最大行程:400mm,直线度:0.2 m/100 mm,光栅反馈分辨率:0.1m;4)驱动:伺服电机驱动摩擦轮传动;5)导轨形式:超精密气体静压导轨;6)承重2000kg。2.床身材料选用床身要支撑整机的重量,它应具有良好的刚度和强度,可以采用不同材料,比如优质耐磨铸铁、花岗岩、人造花岗岩等。1)优质耐磨铸铁铸铁是制
25、造床身的传统材料,它的优点是工艺性好。选用耐磨性好,热膨胀系数低,对振动衰减能力强,并经时效处理的优质合金铸铁作精密仪器的床身,可以得到满意的结果。近年来,虽然多数精密坐标测量仪和精密机床改用花岗岩,但美国Moore公司和瑞士SIP公司仍使用铸铁床身,他们认为花岗岩有吸湿性,会导致微量变形,降低测量的精度,反不如铸铁好。2)花岗岩花岗岩现在已是制造精密测量仪和精密机床的床身的热门材料,这是因为花岗岩比铸铁长期尺寸稳定性好,热膨胀系数低,对振动的衰减能力强,硬度高、耐磨并且不会生锈等。用花岗岩作机架时,一般都用整体方块,钻孔埋入螺母以便和其它件连接。但花岗岩加工比较困难,而且吸湿后会产生微量变形
26、,影响精度。3)人造花岗岩花岗岩不能铸造成形且有吸湿性。为解决这问题国外提出了人造花岗岩。人造花岗岩是由花岗岩碎粒用树脂粘结而成。用不同粒度的花岗岩组合可提高人造花岗石的体积比,使人造花岗岩有优良的性能,不仅可铸造成形,吸湿性低,并对振动的衰减能力加强。在温度特性、动态特性以及工艺特性的方面的相关参数的基础上,考虑到测量仪当今制造业中的使用特点、使用环境、精度以及效率要求,考虑到测量仪对精度的要求是第一位的,而对速度要求一般;由于价值高,一般配备专用的工作环境,环境较好。其移动部件的选材,需要兼顾密度和刚性;而对于固定部件,则对密度/刚性比的要求比较宽松,一般通过加大截面尺寸提高刚性,故固定部
27、件的材料可选择陶瓷或花岗石,所以本次设计的测量仪采用花岗岩为床身材料。国内的泰山青是比较优秀的花岗岩。2.3 导轨的设计在精密加工与测量领域,进行直线运动的机械元部件的导轨主要有滑动导轨、滚动导轨、液体静压导轨和空气静压导轨。滑动导轨具有结构简单、紧凑、刚性高、停止时的稳定性高和热稳定性高及价格低等优点,缺点是由于其导轨与支承结构直接接触,摩擦力较大而且动摩擦系数和静摩擦系数的差值较大,有爬行,定位精度有限,低速时运行的平滑度较其他导轨差一些。滚动导轨结构简单,已实现标准化,是目前使用较多的一种导轨,但精度比滑动导轨和静压导轨要低。液体静压相对于气体静压导轨具有载荷量大、刚度高,阻尼高,对振动
28、的衰减好,应用激光干涉仪的情况下,得到定位精度可以达到0.02m/200mm,直线运动精度为0.05m/200mm。缺点是目前静压导轨的大部分设计只是依赖于简单的工程计算或者实际经验,缺乏一套成熟的理论支持。采用液体静压导轨时,还存在设备复杂和油污染的问题,成本也非常高。液体静压导轨由于油的粘性剪切阻力,发热问题不可忽视,因此对液压油必须采取彻底的冷却对策。液体静压油膜厚度要保持恒定不变比较困难,调试调整费时费力。而且在运行过程中,需要一个压力(或流量)稳定、过滤严格的静压供油系统,才能保证导轨运动的高精度。空气静压导轨主要有如下特点:1)由于空气的粘性系数为油的1/50以下,而且粘度对温度和
29、压力的变化不敏感,空气静压导轨的摩擦力非常小且近似为常数。2)采用空气静压润滑支承,在运动过程中导轨不与支承体直接接触,基准面摩损小,因此精度高而且使用寿命长。3)分布于导轨及支承面之间的5一15m的空气膜对部件缺陷具有平均效应,容易得到高精度。4)爬行少,机械摩损小,噪声低。5)发热量少,工作温度范围宽,热变形非常小。6)无环境污染。因此现在国内外大部分的精密测量设备都用空气静压导轨作为精密运动部件;在适应参数控制模式(MRAC)下采用气体静压花岗岩导轨得到好于土15nm的位置控制精度。在精密测量仪中,要求摩擦发热小,载荷不需要太高,因此主要应用空气静压导轨来构成高精度的直线运动机构。所以根
30、据以上的分析,测量仪的导轨采用空气静压导轨。凡能同时承受轴向、径向或其它方向作用力的气体支撑装置均称为气体静压组合装置。空气静压导轨是典型的气体静压组合装置。根据工作台的移动量、载荷量和精度要求等的不同,一般有如下几种形式,图2-2是气浮导轨的结构示意图。(a) 平面封闭性 (b) 圆柱封闭性 (c) 重量平衡式 (d) 真空负压平衡式图2-2 气浮导轨结构形式1)平面封闭型导轨这种形式的导轨,因工作台导轨面产生的挠度较小,可取得高精度、高刚性、大负载量,最适用于作为精密加工机床和测量仪等的长导轨。2)圆柱封闭型导轨这种结构的导轨结构简单,导杆的圆度、圆柱度和导向孔的间距等精度完全由机械加工决
31、定,全部负载由导柱承受,容易产生挠度,故除了用于立式外,常用于轻载、短导轨。3)重量平衡式导轨这种导轨结构简单,加工方便。但是轴承刚度低,适用于负载变化小的场合。4)真空负压平衡式导轨这种导轨与重量平衡式导轨是同一型式,适用于工作台重量轻或不能加重的场合,使真空负压和静压保持的同时,由维持固定的导轨间隙。根据本次测量仪的设计要求气静压导轨型式采用平面封闭式,图2-3为横梁的气浮分布。圆形气浮垫的机构见图2-4 ,部分尺寸和参数见表2-1.图2-3 横梁的气浮分布图2-4 圆形气浮垫结构图序号直径mm厚度Dmm球径Smm承载Kg f刚度Kg f/m接头螺纹1301510161M524015102
32、72M53501510443M54601516635M55702016879M5680201611313M5790251615619M58100251619625M59120252528240M510150302544070M5112005025780120M51225060501220180M51330060501766270M5表2-1 圆形气浮块部分尺寸和参数2.4 进给传动方式的选择2.4.1 进给丝杠这是目前较多采用的一种进给传动方式。常用的进给丝杠形式有梯形丝杠、滚珠丝杠、空气静压丝杠或液体静压丝杠和滚柱丝杠等。空气静压丝杠或液体静压丝杠的制造误差、弯曲变形等对工作台直线方向上的运
33、动精度影响小,因此在较长的行程上可以达到纳米级的分辨率,另外由于不存在摩擦引起的爬行和回程间隙,可以长期保持精度,但其轴向刚度和承载能力小,制造和装配难度非常大。滚珠丝杠因具有高速、节省能源、易于润滑、跟随灵敏、对周边环境适应性强等特点,应用最广泛。但滚珠丝杆存在回程影响和轴向误差。滚珠丝杠的配合直接影响了滚珠丝杠的精度,很明显,滚珠与螺母之间为点接触,其性能劣于采用面接触的传动螺杆。滚珠丝杠之间为摩擦环节,是一个二阶系统,故从控制角度来讲系统不稳定,容易产生振荡现象,导致不能够很好的定位。滚珠丝杠之间若为间隙配合,丝杠产生回程误差,但是通过双频激光检测系统对进给量的检测和反馈可以进行补偿,问
34、题并不严重;若为过盈配合,微小量的进给实现起来比较困难,容易产生爬行现象。最近一些学者的研究表明,滚珠丝杠在数微米的行程范围内呈非线性弹性现象。Shigeo fuakda根据滚珠和滚道之间的接触状况分别测试了其纳米精度定位的能力。最主要的是,在进给全行程中,丝杠和螺母配合的松紧程度有变化,滚珠螺母之间产生非线性的接触变形,影响进给运动的平稳性和精度,而且不同滚珠所承受载荷的不一致性也影响了它的使用寿命。2.4.2 钢丝和钢索传动这种传动方法可以获得稳定而平滑的运动方式。这种传动方式的优点是无反向间隙,但是由于钢丝等具有伸缩性,进给方向的刚性较弱,随着工作台行程的增大,其力矩和输出位移之间存在明
35、显的非线性迟滞现象。2.4.3 摩擦驱动摩擦驱动是获得平滑而无伸缩变形运动的一种较好驱动方式,在国内外的一些精密机床和坐标测量仪上有所应用,其中国防科技大学在国家自然科学基金的资助下,对小角度扭轮摩擦进行了系统的研究,并成功研制了扭轮摩擦传动精密定位系统。图2-4出的是摩擦驱动示意图,摩擦传动具有定位精度高和结构简单的优点,但是在高速进给中电动机轴和摩擦杆之间容易产生滑动,进给方向的刚性较低。1、伺服电机 2、减速器 3、驱动轮 4摩擦杆5、预紧力 6、线性刻度尺 7、摩擦力图2-4 摩擦驱动示意图驱动轴和从动杆是摩擦传动系统的主要元件。驱动轴亦称滚轮,断面为圆形,由轴承(滚动轴承、液压轴承、
36、空气轴承)支撑着,在伺服电机带动下,通过减速器做旋转运动。从动杆或称滑尺,断面为矩形或圆形,以直角或某一角度与驱动轴接触,在预压机构产生的压紧力P的作用下,接触部位产生摩擦力F,带动从动杆作直线运动。2.5 测量仪整体结构设计各主要部分确定以后,按照各部分的尺寸进行测量仪的总体设计,图2-5为测量仪的三维模型图,图2-6为测量仪的总装配图。图25 测量仪三维图图2-6 测量仪的总装配图2.6 测量仪的工作原理如图2-6,在X向、Z向上,伺服电机6通过同步齿形带带动摩擦轮转动,摩擦轮通过摩擦杆4、11分别带动床身1和Z轴10做直线运动,在Y向上,伺服电机通过同步齿形带带动滚珠转动,再通过钢带5带
37、动溜板2在Y向上的直线运动。测量时,工件固定在工作台上,X、Y、Z三轴均做直线运动,对工件做三维测量,通过测量仪上的光栅尺进行三轴的测量定位,然后通过软件把数据收集分析,完成测量任务。3 测量仪的主要零部件的设计3.1 移动桥的设计移动桥是测量仪设计中,保证机械部分测量精度最重要的零件。它的精度要求直接关系到测量仪的精度。由于移动桥的尺寸较大,用常规的简化计算很难满足设计要求所以采用solidworks进行零件设计校核。移动桥承受的重量主要有溜板的重量和Z轴的重量,总重量估算有800N。花岗岩的弹性模量147000MPa,抗压强度255MpPa。根据AutoCAD的二维图纸,在solidwor
38、ks画出如图3-1的龙门架三维模型。然后经过Cosmosxpress分析后,得出图3-2 龙门架受力变形量;图3-3龙门架应力分布。由图3-2可得出龙门架横梁最大变形处的直线度t:由于t0.2 m/100 mm,所以满足设计要求。由图3-3进行与花岗岩的参数比较强度符合要求。图3-1 移动桥三维模型图3-2 移动桥受力变形量图3-3 移动桥应力分布3.2 溜板的设计首先建立溜板三维模型如图3-4,经过分析后得到的图3-5和图3-6。由图3-5溜板的受力变形量,看出移动受的力为竖直方向的,同一个面内变形均匀。所以只要溜板加工时候满足设计要求,在加载后加载力对Z轴的直线度影响很小。图3-6 移动的
39、应力分布中最大应力为0.8363*106MPa,远小于许用应力45*106MPa。图3-4 溜板的三维模型图3-5 溜板的受力变形量图3-6 溜板的应力分布3.3 电机选型驱动装置是测量仪的重要运动机构,可实现机动和程序控制伺服运劝的功能。在测量仪上一般采用的驱动装置有丝杠丝母、滚动轮、钢丝、齿形带、齿轮齿条、光轴滚动轮等传动,并配以伺服马达驱动。运动控制系统是在自动控制理论的指导下,以电动机为控制对象,以人或机器的操作为控制核心,以电力电子功率变换装置为执行机构组成的电气传动控制系统。根据位置反馈形式,即有无反馈装置,运动控制系统分为开环、半闭环和全闭环三种控制方式。开环控制系统没有位置检测
40、反馈装置,这类系统结构简单,控制方便,但位置精度不高。半闭环控制系统位置反馈装置采用直接安装在伺服电机端部的角度检测元件,这类控制系统虽有位置反馈比较,但大部分机械传动环节未包括在系统闭环环路内,故只可获得较大的定位精度。全闭环控制系统利用安装在最后一级机械运动部件上的光栅等检测元件作为位置反馈装置,这类系统可以消除从电机到被控单元之间整个机械传动链中的传动误差,获得很高的定位精度,但系统的设计和调整较复杂。随着电力电子技术、传感器技术、自动控制技术及计算机技术的发展,全闭环运动控制系统在高精度定位系统的机电一体化产品中得到越来越广泛的应用。由于交流伺服系统与直流伺服电机相比,不仅具有动态响应
41、好、坚固耐用,经济可靠等优点,而且克服了直流伺服电机造价高、寿命短、应用环境受限制等缺点,近年来交流伺服系统多用作全闭环运动控制系统。交流伺服系统包括交流伺服驱动器和伺服电动机,与直流伺服电机相比,交流伺服系统具有以下优点:1)电机散热性好;2)功率相同时,交流伺服电机具有较小的体积和重量;3)由于转子转动惯量小;4)可靠性高,对维护保养要求不高。根据X向、Y向和Z向机械运动平台的构成和各伺服电机主轴承载的径向载荷(相对于电机轴施加的垂直方向的载荷)、轴向载荷(相对于电机轴施加的水平方向的载荷)的大小,近似计算各机械系统的惯性矩即负载惯性矩JL以及驱动机械所需的转矩即负载转矩TL,最后决定选购
42、日本富士FALDIC-W系列型号为GYS401DC2-T2A的交流伺服电机以及与伺服电机配套使用的型号为RYC401D3-VVT2的交流伺服放大器共两套,如图3-7所示,并选购了伺服放大器和伺服电机等连接所用的不同规格的连接器和电缆线。该伺服电机具有防水、防尘等特点,内部装有分辨率为17位的专用编码器,内装编码器与伺服电机的位置关系是调好的,不可拆卸。与伺服电机相配使用的伺服放大器采用微处理器的电子部件构成,将控制电路、驱动电路、多路保护电路等集成在一个模块内,提高了系统的性能,其功能在于完成伺服系统的闭环控制,通过简易调试功能可实现机械和电机最理想的匹配。表3-1为所选购的伺服电机和伺服放大
43、器的部分具体参数。图3-7 富士FALDIC-W系列型号为GYS401DC2-T2A的交流伺服电机和配套伺服放器表3-1 伺服电机GYS401DC2-T2A和伺服放大器RYC401D3-VVT2的部分参数参数GYS401DC2-T2A电机参数RYC401D3-VVT2伺服放大器额定输出(kW)0.4适用电机的输出(kW)0.4额定转矩(Nm)1.27电源相数单相最大转矩(Nm)3.82电源电压AC200-230V额定旋转速度min-1(r/min)3000电源频率50/60Hz最大旋转速度min-1(r/min)5000载频10KHz惯性矩(kgm2)0.24610-4反馈17位串行编码器(增
44、量)额定电流(A)2.7位置控制方式脉冲串最大电流(A)8.1速度控制方式模拟电压耐振动(m/s)49转矩控制方式模拟电压指令电机计算3.4 环境控制平台在没有测量环境保障的前提下,谈实现精密测量是毫无意义的。要实现精密测量,对环境条件的要求十分严格,要求恒温、恒湿和洁净,而且还要隔绝振动。3.4.1 温度控制导致测量热变形误差效应的主要热源有:1)不同温度空气之间的对流,如空调的温度调节系统;2)测量仪内部发热源,如主轴电机以及运动机构的摩擦发热等;3)周围环境的热辐射,如在测量仪周围有其它加工测量仪械,并且正在运行;4)测量仪周围人体的热效应,如人体本身的发热、人员走动以及呼吸作用等;5)
45、测量仪构件和被测工件的温度惯性作用。当这些热源的作用使测量仪温度偏离标准环境温度20时或引起温度分布不均时,由于轮廓仪的主要构件,如长度计、气浮导轨、光栅尺等的热特性差异,它们的热膨胀系数、形状将发生变化,从而导致各构件内部应力状态互不相同,连接构件之间应力关系复杂,最终作用将导致轮廓仪在测量空间、时间域内形成复杂的非线性测量误差。因此环境温度的保障是实现精密测量关键要素之一。对于金属零件温度每变化1,就会造成尺寸误差1-1.6m左右。所以要保证0.1m以上的尺寸测量精度,必须有能检测、控制的测量环境的措施,尽可能地减小温度变化。3.4.2 隔振在精密测量中,测量仪本身振动已通过合理的设计解决
46、,而外界振动对测量精度影响极大。隔振设计主要分为两类:一类为积极隔振,另一类为消极隔振。所谓积极隔振,是为了减少动力设备产生的扰力对测量、设备的支撑结构和生产科研人员的有害影响而对动力设备所采用的隔振措施,即减小振动的输入。而消极隔振,就是为了减小支撑结构的振动对精密测量的影响而对设备采取的隔振措施。无论是积极隔振还是消极隔振,其主要的方法是在振源、精密测量设备与支撑结构之间设置屏障、减振器或减振材料。设计的测量仪总的重量达2吨多,所以要在表格3-2中选择四个ZD-12,形状如图3-8。图3-8 阻尼弹簧减震器表3-2 减震器的型号表产品型号载荷范围(Kg)竖向刚度(N/mm)外型尺寸(mm)
47、HDL1M1M2ZD-9360-42089901612071213ZD-10420-4801021101612071213ZD-11488-5001291101612071213ZD-12500-6301801101612071213ZD-13630-70019611016120712133.5 光栅尺的选型要选择合适的光栅尺要满足:分辨率小于0.1m;量程X轴要大于1000mm,Z轴要大于400mm。直线光栅尺在测量仪械运动位移时安装在最后一级运动平台上,不存在任何附加的机械传动元件,减小了机械的传动误差,故它已成为高精度定位测控制系统不可或缺的检测设备。根据形状测量仪在X向、Y向、Z向的测
48、量范围,本测量仪选购了德国海德汉HEIDENHAIN公司生产的LIP581超精密敞开式直线光栅尺为X轴、Y轴和Z轴光栅尺,分别用于X向、Y向、Z向的位移检测设备。外形如图3-12所示。图3-9 LIP581敞开式直线光栅尺该系列光栅尺是增量式直线光栅尺,由光栅读数头和标尺光栅构成,标尺光栅的基体为钢带,安装方式为将钢带光栅尺的背面粘贴在安装面上。本测量仪所选的光栅尺的技术参数如表3-2所示。标尺光栅和光栅读数头的相互位置由机床导轨确定,他们之间没有机械接触。表3-3 LIP 581系列光栅尺的技术参数技术参数LIP 581测量基准在玻璃上的DRADUR相位光栅8m测量长度(mm)701440m
49、m参考标记在中间有一个参考标记增量信号正弦波准确度等级1m最大移动速度信号周期48m/min内置10倍频细分:0.4m电源功耗5V5%220mA(无负载)信号接口D型接口,3m电缆工作温度0到504 测量仪精度分析4.1 测量仪误差源测量仪作为多轴的复杂系统,常为伺服控制系统,用于高精度规格的复杂测量任务。基于其部件的功能特点,主要有以下影响精度的重要误差源:机构系统、驱动系统、测量系统、计算机系统等。测量仪的机构系统主要包括:支撑测量工件的工作台,导轨,以及装有轴承的桥架等。因为部件制造、调整以及其它属性例如硬度,热膨胀等的非精确性,就会导致误差的产生。这些误差可能是静态的,准静态的或者动态
50、的。对于测量仪,每个轴上都装配有驱动马达、传动部件、伺服控制单元。与驱动系统相关影响测量精确性的因素有:不适当的、非常数的测量速度,因为桥架运动运动所产生的机构载荷所导入的机构振动。因为实际测量点的坐标来自于测量位置(通过标尺读数),而非驱动系统中的指令位置,所以通常定位误差并不十分显著。测量点的实际坐标值来自于测量仪线形标尺的示数。由标尺导致的误差主要源于其较低的制造精度,读数装置的对准、调整误差,内部插值误差和数字性误差。在对于表面点进行探测时,通常使用探针系统。许多的误差源均与探针系统相关联,例如测杆支撑的滞后,测杆弯曲等。同样探测系统由于时间延迟产生的的电(触发)信号也是重要的误差源之
51、一。计算机系统包括控制器单元,硬件、软件。硬件误差一般很少存在。软件主要任务是进行数据计算,并将测量点的位置坐标与工件进行匹配,以获得工件的尺寸和形状。软件在数据计算拟合时就会产生误差,继而严重影响测量结果及其准确性。除了上述误差源而外,测量仪的测量精度还受到外部操作者和工作环境的影响。操作者所产生的误差主要源于测量中产品的处理、测量的策略、以及实际操作者对测量仪的实际操作。产品的处理指测量前的准备工作,如产品的清洁,工件的装夹,均一温度等。如果测量前没有充分的做好准备工作,例如:工件脏污,温度梯度等,这时就会产生误差。测量策略主要是指测端的选用。不合理的测端选用会严重影响测量结果。测量仪的操
52、作主要是指在探测时,尽量在垂直工件表面上以常数的测量速度进行探测,以建立确定的接触。测量仪在手动操作时,由于探测力的大小很难控制,所以探测更倾向于产生误差。测量仪放置位置对于测量精度也十分重要。放置位置环境的温度通常会严重影响机械结构的几何形状、测量精度。同样,由于测量仪附近其他机械体的振动也会严重影响其测量精度。通常,这些振动通过地面传至测量仪的支撑部件,并造成工件和探针产生相对的运动,从而差生误差。另一种环境误差源于空气湿度,它会造成部件的变形,尤其花岗岩工作台受湿度影响最大。根据以往研究,机构对误差的影响最大。这些误差可以是准静态的,也可能是动态的。准静态误差是指:与机构环相关、随时间变
53、化比较缓慢的误差。衡量的尺度取决于相关制程(例如测量)时间尺度的大小。机构环由测量仪中所有用于确定探针和工件位置、方位的机械部件组成。测量任务的精确性首先取决于机构环精度,其次是误差的影响。许多研究对于准静态误差都有精确的阐述,对于测量仪而言,准静态误差主要分为以下几类:1)几何误差。几何误差源于机构部件的有限精度。导轨和测量系统部件的精度取决于制造厂商部件的制造精度,装配和维护的调节精度。导轨的几何误差是指直线度误差和旋转误差,其相对方位受垂直度误差影响。标尺在测量位置所产生的误差与轴线平行(线性误差)。2)机构载荷引起的误差。机构载荷引起的误差源于静态或者测量仪部件上缓慢变化的力。机构载荷
54、的变化源于移动部件的重量,它使得与之配合的部件产生变形、导致几何误差。机构载荷引起的误差取决于部件的刚度和重量、测量仪的结构类型。3)热变形误差。热变形误差源于测量仪与工件的温度场。热误差有两种类型的最为显著。测量标准(例如测量仪的测量标尺)和工件之间的温度差异。机械内部部件的温度梯度(温度梯度会导致部件部件变形,例如导轨弯曲变形产生几何误差)。以上误差取决于测量仪的结构、材料属性、温度分布。温度分布与外部环境温度、内部热源例如驱动电机有关。除了以上众所周知的准静态误差,动态误差也会影响测量仪的测量精度。动态误差相对随时间变化较快,例如,由加速度所决定的测量仪部件的变形,这些变形源于部件移动以
55、及振动,振动可以是自激振动或者强迫振动。与准静态误差相似,动态误差同样会影响到测量仪的结构几何形状,并将导致随时间变化的测量误差。动态误差和测量仪的结构属性紧密相关,例如质量分布、部件刚度、阻尼特性、控制力和干扰力。4.2 测量仪精度分析影响仪器精度的原因有根多种,有些精度是由仪器硬件本身决定的,无法改变,如测量表的测量精度;有些引起误差的原因可以经过后续数据处理得到改善,从而达到提高测量仪的测量精度,如仪器装配引起的误差。对于设计的测量仪测量精度要求小于1m。现对仪器的精度进行分析。4.2.1 测量表的精度光栅尺采用海德汉的LIP581光栅尺测量分辨率为O.05m;符合课题要求:分辨率:0.
56、1m。4.2.2 数学模型的误差由图4-1可知,测量头读数计读出的数据实际上是测量头球心相对于非球面包络线,图中测头所测的值为圆心所在的值,与测头和被测表面的接触点不是同一个点,测量误差为: (4-1)式(4-1)中,为实际切线角。图4-1 数学模型误差该测量仪的数学模型引起的测量误差由两个因素决定:1)测量头的大小。当测量头的半径越小,测量精度越高;2)被测非球面的面形质量。当被测面形越接近理论面形,测量精度也就越高。本设计采用的测量头半径为2mm,测量头半径r相对于R(被测非球面近轴曲率半径)极小;而被测件将是一个连续光滑的表面,即使工件面形偏离了理论面形,也不会在加工工件表面有突然的凸起
57、或凹坑,因此实际切线角将非常接近理论切线角a,因此测量仪的数学模型引起的测量误差对被测非球面矢高误差曲线的测量精度几乎没有影响,在测量精度范围内。4.2.3 测杆受力引起的误差这个误差是因为测头与工件表面接触时有接触力产生,所以产生了变形。主要对Z轴方向的测量精度有影响。误差值为L (4-2)因为海德汉的测头材料的弹性模量E1=70GPa,被测件材料的弹性模量E2=55GPa。接触力F=0.6N,。这个误差远小于测量仪的精度,所以不予考虑。5 结束语大学最后的时光在在毕业设计中度过的,通过这学期从开始的毕业设计的前期准备,到最后的毕业设计的整理,我感觉到了一种变化,一种从无到有,从陌生到熟悉再
58、到熟练的的变化。刚开始拿到课题的时候是那么的陌生,可是说是从未接触过的。于是出于对陌生事物的好奇,刚开始的时候有种浑身是劲,但不知如何下手的感觉。可能每个人都有从理论到自行设计的过渡时期,但是我个人认为它实在是太长了,没有了现行的思路,没有了设计的目的,很多想法也只是有灵感一现的感觉。在老师的指导下我渐渐找到设计方向。但是毕竟这是毕业设计是需要真知识的,很多学过的知识已被岁月无情的冲刷地只留下了浅浅的痕迹了。所以在设计中我不断地复习以前的知识,在公司还得到许多师兄们的帮助。就这样我的设计方案就渐渐地浮出了水面,但是还是出现了不少问题,所以在最后的阶段,我还是在不断地修改中度过了。当最后完成设计
59、的时候,我觉得是梦想已成现实。对机械的兴趣,让我了解机械,让我开始设计机械。毕业设计结束了,毕业设计中我们学到的东西是宝贵的,在教会我们理论知识的同时也教会我们以后学习的方法,让我们在今后的学习和工作中有一个清晰的思维,完善的思路,不管在何种工作岗位,不论遇到什么情况,我们都会以一种平静敬业的心态,踏实认真的作风认真投入到工作中去。这次任务的完成给了我信心,给了我斗志,我相信在今后的工作生活中,我都会一步步改正自己的不足,一点点提高自己的能力,完善自我提高自己。参考文献1 李庆祥.现代精密仪器设计M.北京:清华大学出版社.20052 李圣怡,戴一帆.精密和超精密机床设计理论与方法G.国防科技大
60、学出版社.20093 大连理工大学工程画教研室编.机械制图M.高等教育出版社.20034 机械设计手册编委会.机械设计手册第2卷G.机械工业出版社.20085 王先奎.精密加工技术实用手册G.机械工业出版社.20016 陈智锋.精密柱径测量理论_方法与技术的研究D.国防科技大学.20027 黄大宇,梅瑛.机械设计课程设计M.吉林大学出版社.20068 裘祖荣. 精密机械设计基础M. 北京: 机械工业出版社.20079 哈尔滨工业大学编.长度计量手册S.北京:科技出版社.197910 王惠敏主编.仪器仪表结构设计手册S.北京:国防工业出版社.198911 竺培国.精密仪器结构设计基础M.哈尔滨:哈尔滨工业大学出版社.198812 阳平华. Solidworks2006机械设计时尚百例.北京:机械工业出版社.200613 赵则祥.公差配合与质量控制M.河南:河南大学出版社.199914 邓星钟主编.机械传动控制M.武汉:华中科技大学出版社.200115 王平安,王杰贤等.精密仪器工作台的隔振设计J.西安建筑科技大学学报.1999 .31(3)16 王欣.三坐标测量仪动态误差分析D.西安理工大学.2007
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
