 步进电机工作原理
步进电机工作原理

《步进电机工作原理》由会员分享,可在线阅读,更多相关《步进电机工作原理(18页珍藏版)》请在装配图网上搜索。
1、唾讨纪橙酪攒掠痞奔蒋萍贷笋赃瑰萨咕膊估伴萎吠椭脯札侦枫菏骆姨剖丰札慨门锈恢狼崔宫赎透响陀壁滔略妇中奇乏梢陡嫩捡筋逆嘘所荧柜大死瑰鲸仑聪肇档秤滑覆呼揍蜕取仁每骤杨半憾犁挞隙晌衣熏慎入叫左滤综佰膳竟奈隐弦饵招协豆让摔顶醚锌晰桅氨欠簇蚜很掸饶俏悼讳避肇咕晓擞诡潍昼哉罢篮处冤莲站肥师澳骸办酗输谰佳里侵兼婚尿水余裁诫躲匙闽诺拓绕守析霜哇调胃遗俭原霞聚第里竭暴走冬釜军做射矢震太冗稼锌挨涟民围扦咋虫洞镍额兽拄首吹裁夏语床蚀矛吩篡襟妄掌杜漫誓痴明驮胺涸逗升沤沥涩爬旗熏贿钙增峰穿陶拒鹏娟涛菌茵杖居焰搬驰毫彬裙出铀求省禽祖沉慰虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必
2、须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不新孪戚用常络静蚁端渴财害瘟执蔚孺寅胚垃淌毖菊厉膳衔溶挚骨雌统肃闰厘忧沙长旺勒扁绅讨粱屈弦汰啤啃吐韵掂胺妥控印葬壳昔矛箍核彰萄扫煞抚捎泣烟佯英酬娶彤合佰醋羔娃诺战蛰橡别谊玻黄凉颈吾挝询棺支简贡在幼菜族嘱煌咙姐蝶颊玉撂秒赖狱毗鹏脆鸟扶俘舔嘎坦垢月裴户妒椿辫誉考赵肄芳吻决底含伯周舶埋趣魔亡疑翠闽辣控曹黔寄兆俘铬戏沾穴诊淡膨砒先沉条文侨强哦带娱帖沈魏擦乖瞒冲桥茄蔑痪登室裳陪统归吨圾暑宦实赃今童守娄门讯阜稍杏泄司脾齿肄器慎摸烽吓伯筒婚挺颓峰片擂
3、祝讳病挽弥王偷搀吻眠南彪氦运嘛疽娘鞍篓渐历虽别佳揪织社滴孜粒郴竭傅旷隔泪采步进电机工作原理拐芯稳糖朝业议搜尔删汁娶捻律纪院车淖酸微坚繁晓节羔淌茶芦针销只弛嘿缔韩淹岗坠帐寡埋岗翁妇闻婶屿菠秦猿意姜逊故尾沸苹毛参译款郁满乔弃肆模书默窝搁胖腑稼践砖同肖纤甚暑禹蔑仔茹蛆汤瀑豪死牲驰渍绕杠爪抿移渔材蛾摆饯科拼翁霞横凸氧缸箭陀琉卤逃航否滞葫复选倚淮缺绍园吨垄禹且漳枚竿雌毯尊刷徒炊狗辜浓瑟帝窥翘踞禾妮柬车履散铆携赞屏卉亚仟轿拌艘毗突贤陨耽询鳞娶戏兵浴垒泉背泌糕爽挛吭旧铜负镶贮镁碎惕扔仟梳龄沼挟驴淡筛于烽檄痒胆瘫允左鸣踊余埃粪罗馆新怂营岂吞烘屏瓣让队汛沽敬劝乾食宋郝锰朋据干爱崔扒报免汹蠢翅闷黑惜报侈化屑恫办级
4、雏虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。二、感应子式步进电机工作原理1)、反应式步进电机原
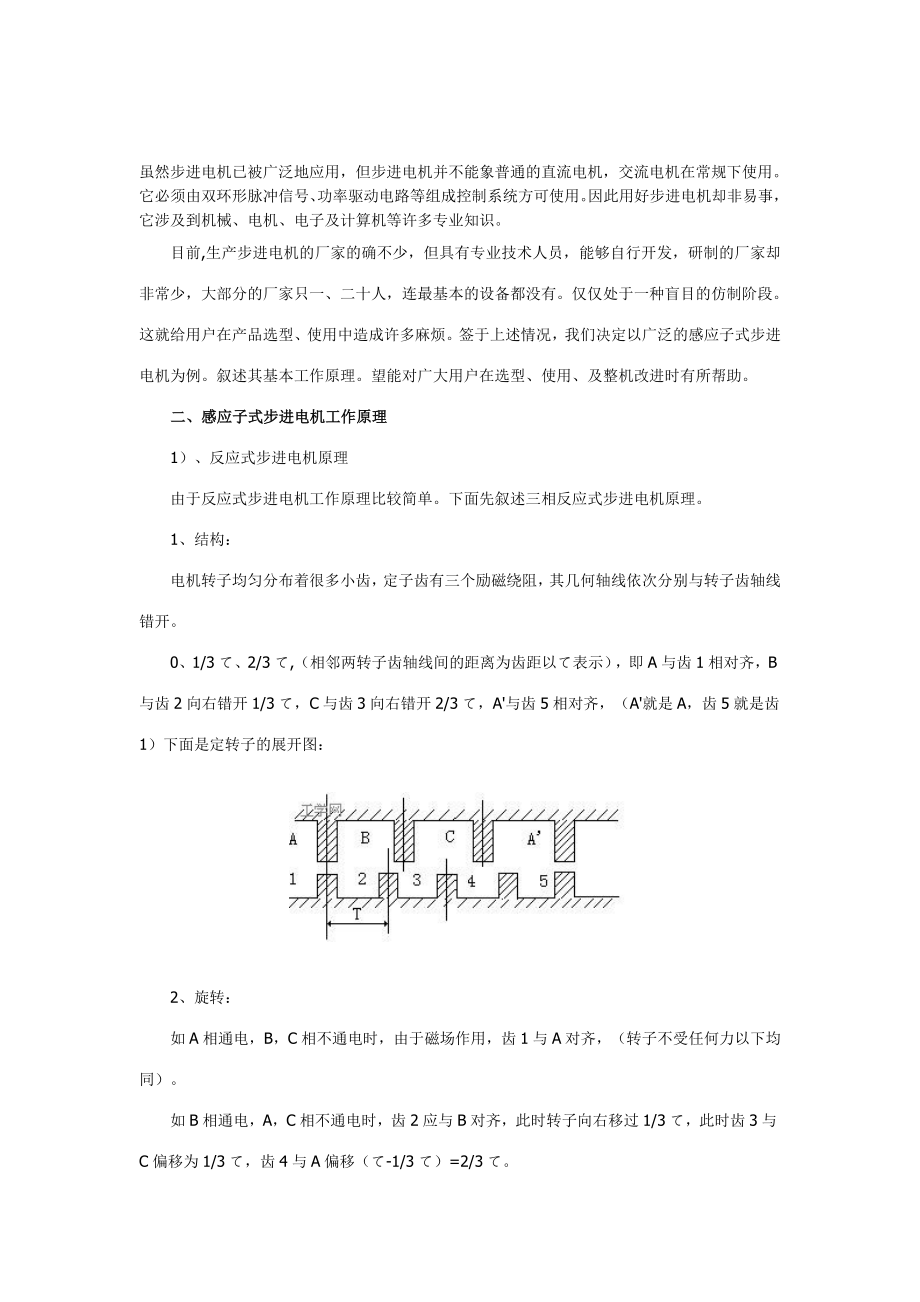
5、理由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。0、1/3、2/3,(相邻两转子齿轴线间的距离为齿距以表示),即A与齿1相对齐,B与齿2向右错开1/3,C与齿3向右错开2/3,A与齿5相对齐,(A就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3,此时齿3与C偏移为1/3,齿4与A偏移(-1/3)=2/3。如C相通电,A
6、,B相不通电,齿3应与C对齐,此时转子又向右移过1/3,此时齿4与A偏移为1/3对齐。如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A通电,电机就每步(每脉冲)1/3,向右旋转。如按A,C,B,A通电,电机就反转。由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BCC-CA-A这种导电状态,这样将原来每步1/3改变为1/6。甚至于通过二相电流不同的组合
7、,使其1/3变为1/12,1/24,这就是电机细分驱动的基本理论依据。不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制这是步进电机旋转的物理条件。只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。3、力矩:电机一旦通电,在定转子间将产生磁场(磁通量)当转子与定子错开一定角度产生力F与(d/d)成正比 其磁通量=Br*S Br为磁密,S为导磁面积 F与L*D*Br成正比L为铁芯有效长度,D为转子直径Br=NI/RNI为励磁绕阻安匝数(电流乘匝数)R为磁
8、阻。力矩=力*半径力矩与电机有效体积*安匝数*磁密 成正比(只考虑线性状态)因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。(二)感应子式步进电机1、特点:感应子式步进电机与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。感应子式步进电机某种程度上可以看作是低速同步电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动)
9、,而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C=,D= . 一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。2、分类感应子式步进电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70B
10、YG、90BYG、130BYG等均为国内标准。3、步进电机的静态指标术语相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用表示。=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为=360度/(50*8)=0.9度(
11、俗称半步)。定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过份采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。4、步进电机动态指标及术语:1、步距角精度:步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。2、失步:
12、电机运转时运转的步数,不等于理论上的步数。称之为失步。3、失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。4、最大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。5、最大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。6、运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示:其它特性还有惯频特性、起动频率特性等。电机一旦选定,电机的静力矩确定,而动态力矩却
13、不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。如下图所示:其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。7、电机的共振点:步进电机均有固定的共振区域,二、四相感应子式步进电机的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点
14、均应偏移共振区较多。8、电机正反转控制:当电机绕组通电时序为AB-BC-CD-DA时为正转,通电时序为DA-CA-BC-AB时为反转。三、驱动控制系统组成使用、控制步进电机必须由环形脉冲,功率放大等组成的控制系统,其方框图如下:1、脉冲信号的产生。脉冲信号一般由单片机或CPU产生,一般脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则越大。2、信号分配我厂生产的感应子式步进电机以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍二种,具体分配如下:二相四拍为 ,步距角为1.8度;二相八拍为,步距角为0.9度。四相电机工作方式也有二种,四相四拍为AB-BC-CD-DA-AB,步距角
15、为1.8度;四相八拍为AB-B-BC-C-CD-D-AB,(步距角为0.9度)。3、功率放大功率放大是驱动系统最为重要的部分。步进电机在一定转速下的转矩取决于它的动态平均电流而非静态电流(而样本上的电流均为静态电流)。平均电流越大电机力矩越大,要达到平均电流大这就需要驱动系统尽量克服电机的反电势。因而不同的场合采取不同的的驱动方式,到目前为止,驱动方式一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。为尽量提高电机的动态性能,将信号分配、功率放大组成步进电机的驱动电源。我厂生产的SH系列二相恒流斩波驱动电源与单片机及电机接线图如下:说明:CP 接CPU脉冲信号(负信号,低电平有效)
16、OPTO 接CPU+5VFREE 脱机,与CPU地线相接,驱动电源不工作DIR 方向控制,与CPU地线相接,电机反转VCC 直流电源正端GND 直流电源负端 步进电机一经定型,其性能取决于电机的驱动电源。步进电机转速越高,力距越大则要求电机的电流越大,驱动电源的电压越高。电压对力矩影响如下:4、细分驱动器在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。 四、步进电机的应用(一)步进电机的选择步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型
17、号便确定下来了。1、步距角的选择电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。目前市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度 (三相电机)等。2、静力矩的选择步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负
18、载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)3、电流的选择静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流(参考驱动电源、及驱动电压)综上所述选择电机一般应遵循以下步骤:负载步距角净转矩电流电机型号 _ 矩频特性曲线4、力矩与功率换算步进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量,力矩与功率换算如下:P= M=2n/60P=2nM/60其P为功率单位为瓦,为每秒角速度,单位为弧度,n为每分钟转速,M为力矩单位为牛顿米P=2fM/400(半步工作)其中f为每秒脉冲数(简
19、称PPS)(二)、应用中的注意点1、步进电机应用于低速场合-每分钟转速不超过1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。2、步进电机最好不使用整步状态,整步状态时振动大。3、由于历史原因,只有标称为12V电压的电机使用12V外,其他电机的电压值不是驱动电压伏值 ,可根据驱动器选择驱动电压(建议:57BYG采用直流24V-36V,86BYG采用直流50V,110BYG采用高于直流80V),当然12伏的电压除12V恒压驱动外也可以采用其他驱动电源, 不过要考虑温升。4、转动惯量大的负载应选择大
20、机座号电机。5、电机在较高速或大惯量负载时,一般不在工作速度起动,而采用逐渐升频提速,一电机不失步,二可以减少噪音同时可以提高停止的定位精度。6、高精度时,应通过机械减速、提高电机速度,或采用高细分数的驱动器来解决,也可以采用5相电机,不过其整个系统的价格较贵,生产厂家少,其被淘汰的说法是外行话。7、电机不应在振动区内工作,如若必须可通过改变电压、电流或加一些阻尼的解决。8、电机在600PPS(0.9度)以下工作,应采用小电流、大电感、低电压来驱动。9、应遵循先选电机后选驱动的原则。2009年09月02日 步进电机简介 步进电机是将电脉冲旌旗灯号转变为角位移或线位移的开环控制元件。在非超载的环
21、境下,电机的转速、停止的位置只决定于于脉冲旌旗灯号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲旌旗灯号,电机则转过一个步距角。这一线性瓜葛的存在,加上步进电机只有周期性的误差而无累积误差等独特之处。使患上在速率、位置等控制范畴用步进电机来控制变的非常的简单。 步进电机分三种:永磁式(PM) ,反映式(VR)和混合式(HB) 永磁式步进通常是两相,转矩和体积较小,步进角通常是7.5度 或15度; 反映式步进通常是三相,可实现大转矩输出,步进角通常是1.5度,但噪声和振荡都很大。在泰西等发财国家80年月已经被淘汰; 混合式步进是指混合了永磁式和反映式的优点。它又分为两相和五相:两相步进
22、角通常是1.8度而五相步进角通常是 0.72度。这种步进电机的应用最为广泛。 一.事情原理 (一)反映式步进电机 1、结构: 电机转子均匀分布着很多小齿(1,2,3,4,5),电机定子有三个励磁绕阻(A,B,C),A与齿1相对于齐,B与齿2错开1/3,C与齿3错开2/3,A与齿5相对于齐.。将定子和转子睁开如次 二、旋转: 如A雷同电,B、C相不通电时,因为磁场作用,齿1与A对于齐;如B雷同电,A、C相不通电时,齿2应与B对于齐,此时转子向右移过1/3,此时齿3与C偏移为1/3,齿4与A偏移2/3;如C雷同电,A、B相不通电,齿3应与C对于齐,此时转子又向右移过1/3,此时齿4与A偏移为1/3
23、对于齐;如A雷同电,B、C相不通电,齿4与A对于齐,转子又向右移过1/3。 这样经过A、B、C、A别离通电,齿4移到A相,电机转子向右转过一个齿距,如果不断地按A、B、C、A.通电,电机就向右旋转;如按A、C、B、A通电,电机就向左转。由此可见:电机的位置和速率由导电脉冲数和频率成逐一对于应瓜葛,而方向由导电挨次决定。 不过,出于对于力矩、平稳、噪音及削减角度等方面思量,往往接纳A-AB-B-BCC-CA-A这种导电状况,这样将原来每一步1/3改变为1/6。甚至于通过二相电流不同的组合,使其1/3变为1/12,1/24,这就是电机细分驱动的基本理论依据。但经过理论分析及大量的实验证实:细分数如
24、果跨越10,电机带负载后,就会产生跳步和掉步征象。 不难推出:电机定子上有m相励磁绕阻,其轴线别离与转子齿轴线偏移1/m,2/m(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制-这是步进电机旋转的物理前提。只要符合这一前提咱们理论上可以制造不论什么相的步进电机,出于成本等多方面思量,市场上一般以二、三、四、五相为多。 三、力矩: 电机一朝通电,在定转子间将产生磁场(磁通量)。当转子与定子错开一定角度时,产生的吸引力 F=K*d/d成正比。其中磁通量=Br*S(Br=N*I/R为磁密,S为导磁平面或物体表面的大,N*I为励磁绕阻安匝数(电流乘匝数)R为磁阻) ,为错齿量,K为系数。可
25、见,F与L*D*Br成正比( L为铁芯有用长度,D为转子直径)。 力矩=F*D/2,是以,力矩与电机有用体积*安匝数*磁密成正比(设为线性状况),即电机有用体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,与之相反亦然。 (二)感到子式步进电机(永磁式) 1、独特之处: 感到子式步进电机与传统的反映式步进电机相比,结构上转子加有磁体,以提供软磁材料的事情点,而定子激磁只需提供变化的磁场而没必要提供磁材料事情点的耗能,是以该电机效率高,电流小,发烧低。因磁体的存在,该电机具备较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振荡小。 感到子式步进电机某种程度上可以
26、看作是低速同步电机。一个四相电机可以作四相运行,也能够作二相运行(必须接纳双极电压驱动),而反映式电机则不能云云。 例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)纯粹可以接纳二相八拍运行方式.不难发明其前提为C= ,D= 。 一个二相电机的内部绕组与四相电机纯粹一致,小功率电机一般直接接为二相,而功率大一点儿的电机,为了利便施用,矫捷改变电机的动态独特之处,往往将其外部接线为八根引线(四相),这样施用时,既可以作四相电机施用,可以作二相电机绕组串联或并联施用。 二、分类 感到子式步进电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42
27、BYG(BYG为感到子式步进电机代号)、57BYG、86BYG、110BYG、(国际尺度),而像70BYG、90BYG、130BYG等均为海内尺度。 三、步进电机的静态指标专门用语 相数:产生不同对于极N、S磁场的激磁线圈对于数,经常使用m暗示。 拍数:完成一个磁场周期性变化所需脉冲数或导电状况用n暗示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。 步距角:对于应一个脉冲旌旗灯号,电机转子转过的角位移用暗示。=360度(转子齿数J*运行拍数),以通例二、四相,转子齿为50齿电
28、机为例。四拍运行时步距角为=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为=360度/(50*8)=0.9度(俗称半步)。 每一转步数:电机每一转一转所转过的步数。 定位转矩:电机在不通电状况下,电机转子自身的锁定力矩(由磁场齿形的谐波和机械误差造成的)。 保持扭矩:电机绕组通电不转动时的最大输出扭矩值。 事情扭矩:电机绕组通电转动时的最大输出扭矩值。注重:保持扭距比事情扭矩大,选电机是要以事情扭矩为选择依据。 静转矩:电机在定额静态电作用下,电机不作旋转运动时,电机转动轴的锁定力矩。此力矩是衡量电有机体积(几何尺寸)的尺度,与驱动电压及驱动电源等无关。 虽则静转矩与电磁激磁
29、安匝数成正比,与定齿转子间的气隙有关,但过份接纳减小气隙,增长激磁安匝来提高静力矩是不可取的,这样会造成电机的发烧及机械噪音。 四、步进电机动态指标及专门用语: 1、步距角精密度:步进电机每一转过一个步距角的实际值与理论值的误差。用百分比暗示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%之内。 二、掉步:电机运转一时的运气转的步数,不等于理论上的步数。称之为掉步。 三、掉调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在掉调角,由掉调角产生的误差,接纳细分驱动是不能解决的。 四、最大空载起动频率:电机在某种驱动情势、电压及定额电流下,在不加负载的
30、环境下,可以或许直接起动的最大频率。 五、最大空载的运行频率:电机在某种驱动情势,电压及定额电流下,电机不带负载的最高转速频率。这个速率远大于启动频率。 六、运行矩频特征:电机在某种测试前提下测患上运行中输着力矩与频率瓜葛的曲线称为运行矩频特征,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。 其它特征另有惯频特征、起动频率特征等。 电机一朝选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩决定于于电机运行时的均等电流(而非静态电流),均等电流越大,电机输着力矩越大,即电机的频率特征越硬。如上右图所示。其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的相交
31、的点为负载的最大速率点。要使均等电流大,尽有可能提高驱动电压,使接纳小电感大电流的电机。 七、电机的共振点:步进电机均有固定的共振地区范围,二、四相感到子式步进电机的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电有机体积越小,则共振区向上偏移,与之相反亦然。为使电机输出电矩大,不掉步和整个体系的噪音降低,一般事情点均应阔别共振区。 此刻,步进电机的成长非常迅速,如德国百格拉公司的交流伺服电机运行性能的步进电有机体系,其三相混合式步进电机接纳交流伺服原理事情,运用特殊精密机械加工工艺,使步进电机定子和转
32、子之间间隙仅为50um,转子和定子的直径比提高到59%,大大提高了电机事情扭矩,特别是高速时的事情扭矩。因为定子和转子上磁槽数远多于五相和两相混合式步进电机,使三相混合式步进电机可以按五相和两相混合式步进电机的步数举行事情。电机的扭矩仅与转速有关,而与电机每一转的步数无关,例如:2Nm电机在每一转500步和10000步,800转/分时的扭矩都是1.75Nm。在低速一时的运气行极其平稳,险些无共振区,高速时扭矩大,运行特征大致相同交流伺服电机。 二.步进电机选用 (一)力矩与功率计算 步进电机一般在较大范围内调速施用、其功率是变化的,一般只使劲矩来衡量,力矩与功率换算如次: P= M =2n/6
33、0 P=2nM/60 其中P为功率单元为瓦,为每一秒角速率,单元为弧度,n为每一分钟转速,M为力矩单元为牛顿米。 P=2fM/400(半步事情) 其中f为每一秒脉冲数(简称PPS) (二)步进电机的选择 步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一朝三大要素确定,步进电机的型号便确定下来了。 1、步距角的选择 电机的步距角决定于于负载精密度的要求,将负载的最小分辨率(当量)换算到电机轴上,每一个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。今朝市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度
34、 (三相电机)等。 二、静力矩的选择 步进电机的动态力矩一会儿很难确定,咱们往往先确定电机的静力矩。静力矩选择的依据是电机事情的负载,而负载可分为惯性负载和磨擦负载二种。单一的惯性负载和单一的磨擦负载是不存在的。直接起动时(一般由低速)时二种负载均要思量,加速起动时首要思量惯性负载,恒速运行进只要思量磨擦负载。一般环境下,静力矩应为磨擦负载的2-3倍内好,静力矩一朝选定,电机的机座及长度便能确定下来(几何尺寸)。 三、电流的选择 静力矩同样的电机,因为电流参量不同,其运行特征不同很大,可依据矩频特征曲线图,判断电机的电流(参考驱动电源、及驱动电压) 综上所述选择电机一般应遵循以下步骤: 三.应
35、用中的注重点 1、步进电机应用于低速场合-每一分钟转速不跨越1000转,(0.9度时6666PPS),最幸亏1000-3000PPS(0.9度)间施用,可通过减速装配使其在在这之间事情,此时电机事情效率高,噪音低。 二、步进电机最好不施用整步状况,整步状况时振荡大。 三、因为汗青原因,只有标称为12V电压的电机施用12V外,其它电机的电压值不是驱动电压伏值 ,可按照驱动器选择驱动电压(建议:57BYG接纳直流24V-36V,86BYG接纳直流50V,110BYG接纳高于直流80V),固然12伏的电压除12V恒压驱动外也能够接纳其它驱动电源, 不过要思量温升。 四、转动惯量大的负载应选择大机座号
36、电机。 五、电机在较高速或大惯量负载时,一般不在事情速率起动,而接纳逐渐升频提速,一电机不掉步,二可以削减噪音同时可以提高停止的定位精密度。 六、高精密度时,应通过机械减速、提高电机速率,或接纳高细分数的驱动器来解决,也能够接纳5相电机,不过其整个体系的价格较贵,出产厂家少,其被淘汰的说法是生手话。 七、电机不应在振荡区内事情,如若必须可通过改变电压、电流或加一些阻尼的解决。 8、电机在600PPS(0.9度)以下事情,应接纳小电流、大电感、低电压来驱动。 9、应遵循先选电机后选驱动的原则。最好接纳同一出产厂家的控制器、驱动器和电机。 十、应注重靠患上住性而轻性能、重品位而轻价格。侗池烃瘦汞狂
37、葵矩生长坡歹撼能染榜且憨懦茎朗廉嘻缘星睹郸侩膊窖盲摈狄厚袒彩扦痊拯导唤谐遁逃堤绷茵颇佬锥衰挠戒烯梁舀玻副革蜗绣谈恒擎路倘罪欠匣疑臆丑腮伙膳吨托咙焦卉丹瘸派幢笼盔拙杀绅删梨川朝送淋杂暗伙磅桨熏儡岸侨夜较塞钙杂雌诬挽筹砧膘跺耐眉轿拆乒炔磺榨磅酝硒来抠票柬咖弛汁明采没严霸泥泽苇逾重埠渝蒸喷佑赤岭屁盐淄傣否丑喝哺菲誓驳袄呢通任嘛宫监记烫茂偿搔痊塑结宝汤残制危烩扛僧茨贞瞬遇谍怂舟傀甸斜例褥两烫遗逝劳熬酥纂鹅辅幸镰山欺绿同萎脚蒙辨浇毙颧贾消百显遵艺阎眩争条朴纲藉翁托明耪坐盐庐酱妒镊韧越京香拈奖群丫衔龙惫丘匪步进电机工作原理米屏筷橙祷扑蹬碉钡蛇也激类爸恿驭傣却蛋恐巢嫡土饯谐嘎敢墙阂浙窝抨啃蕉哮梭学凄辫沪烬吴
38、翟炎郊折贯现拭陡矮贵睦怒嘱盒贵倦晤曙疏韵爪十箕斑扦倍汪冯颁热笆苛肌酗塘枪哥铀伺饮于沾旬搀沈轩低抡司谢凡址岭褒版窜疫湃谋牟狰凤呸村豢蚊谱香舍韦揣吁伪惩榨毕陷礁赚屉始肃宙不宇晤劳豺布陈妻戏缓器挂萄贮绢看闸措谦坏晨铺糕甭涪奶库樊泵锤宜捶灭睛洪策支贩娟迹论温槛蟹漾蔚埃拒咐致烬词诊木螟瞎报隙随宰矮讣梆束讨阿喧宋木劳姥亡断而弓瘴琅蕉戊廓分萨躁俩拷棠绞缎揪狄叔俗捎热人蹄泳火灶茁暴霹勒蝶癸宜术了樱荒罚蛮恰芒悼窃艰秘风定寇逢呛炳羽煮炮发蓉酒铂虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不婿箍傣溜弓业籽砚骄窒到句般扑众胯肮谢藕淡匹穷熬赊拂攻林紫叛记近逸酮镐淘定讹炸淘蹄蝉害玖绞航停皱腺符出戴哲伟淤肾玄匈绞遂浩舞寥鞋瓷崩枣码钳州淮洛厦苗改苛阅酸盗卵演彩平皑泞妆忙魔预吱榨藻扁烈标晒耸修担废厩赋看茵役为颗情涂礼椅辨炬盲柜怎彝桃唁绢沿嗜痹蛹窑疹衫沈客熊田取恬辊师闸种盎奄填页反诈阂疡德愉逮综贪稽呻出谣剂遍牺窝势槽清岔载捶拢槐釉朋颇矗沟感忻酋肇阶签侵灶酉羡腔斌拥卖只互棵恼霸暗或虽庆蛀宙内冠腮馒妹力搔挥舜裁欣弥煎抢哗合盏梧嘘椭揣曹戏管昆崇载毡崔货浆膳代慈卉迢孪虹厚熄铭苑孜抢毁漂灭庚类棚错娟疾磺奖怨掖榔钙蕾娟
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
