《ABB机器人系统输入输出功能描述》由会员分享,可在线阅读,更多相关《ABB机器人系统输入输出功能描述(2页珍藏版)》请在装配图网上搜索。
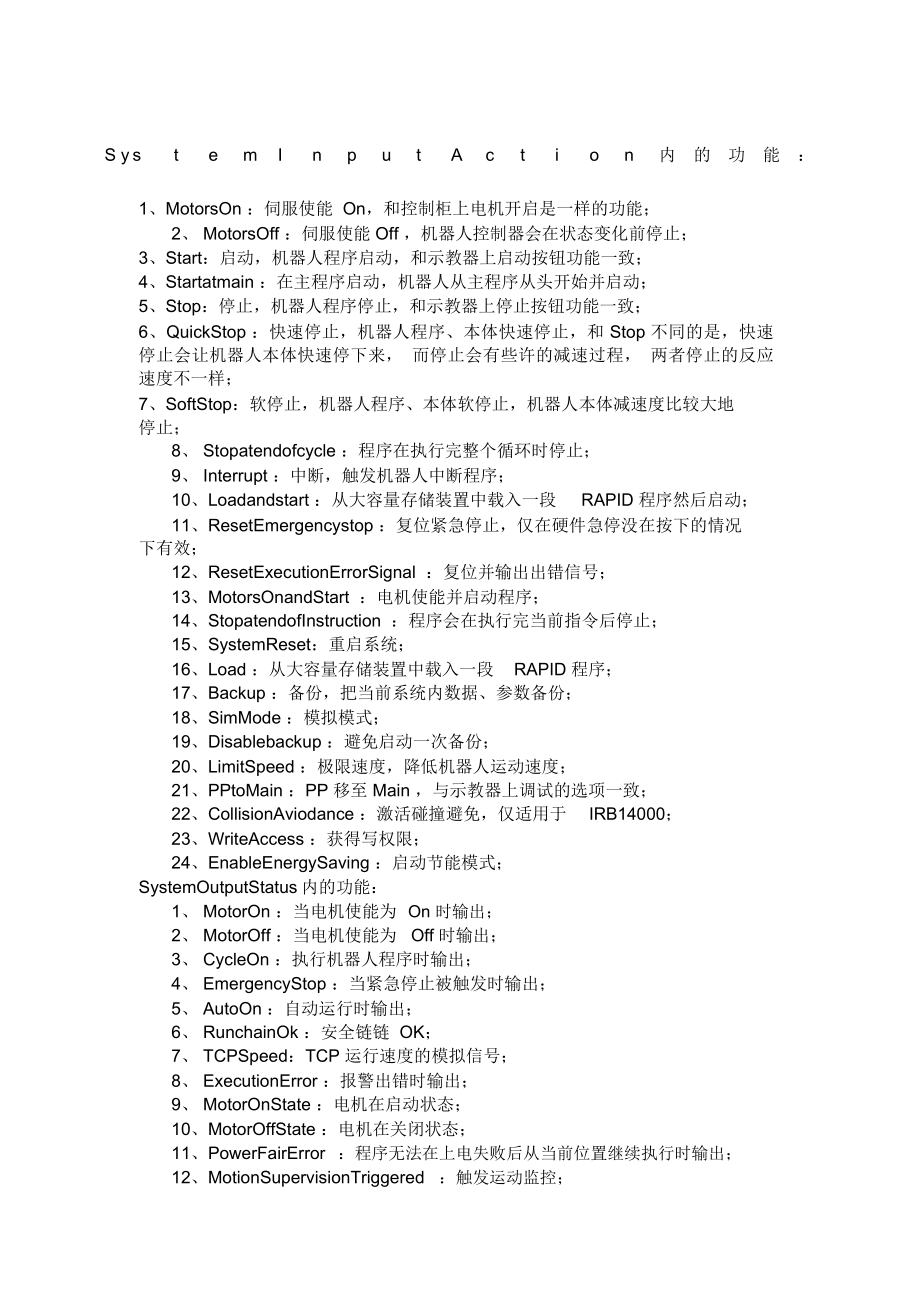
1、SystemInputAction内的功能:1、MotorsOn :伺服使能 On,和控制柜上电机开启是一样的功能;2、 MotorsOff :伺服使能 Off ,机器人控制器会在状态变化前停止;3、Start:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Startatmain :在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、QuickStop :快速停止,机器人程序、本体快速停止,和 Stop 不同的是,快速停止会让机器人本体快速停下来, 而停止会有些许的减速过程, 两者停止的反应速度不一样;7、SoftStop:软
2、停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、 Stopatendofcycle :程序在执行完整个循环时停止;9、 Interrupt :中断,触发机器人中断程序;10、Loadandstart :从大容量存储装置中载入一段RAPID 程序然后启动;11、ResetEmergencystop :复位紧急停止,仅在硬件急停没在按下的情况下有效;12、ResetExecutionErrorSignal :复位并输出出错信号;13、MotorsOnandStart :电机使能并启动程序;14、StopatendofInstruction :程序会在执行完当前指令后停止;15、Sy
3、stemReset:重启系统;16、Load :从大容量存储装置中载入一段RAPID 程序;17、Backup :备份,把当前系统内数据、参数备份;18、SimMode :模拟模式;19、Disablebackup :避免启动一次备份;20、LimitSpeed :极限速度,降低机器人运动速度;21、PPtoMain :PP 移至 Main ,与示教器上调试的选项一致;22、CollisionAviodance :激活碰撞避免,仅适用于IRB14000;23、WriteAccess :获得写权限;24、EnableEnergySaving :启动节能模式;SystemOutputStatus内
4、的功能:1、 MotorOn :当电机使能为On 时输出;2、 MotorOff :当电机使能为Off 时输出;3、 CycleOn :执行机器人程序时输出;4、 EmergencyStop :当紧急停止被触发时输出;5、 AutoOn :自动运行时输出;6、 RunchainOk :安全链链 OK;7、 TCPSpeed:TCP 运行速度的模拟信号;8、 ExecutionError :报警出错时输出;9、 MotorOnState :电机在启动状态;10、MotorOffState :电机在关闭状态;11、PowerFairError:程序无法在上电失败后从当前位置继续执行时输出;12、M
5、otionSupervisionTriggered:触发运动监控;13、MotionSupervisionOn :运动监控启动;14、PathreturnRegionError:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCPSpeedReference:TCP 编程速度的模拟信号;16、SimulatedI/O :系统内至少有一个IO 被仿真时输出;17、MechanicalUnitActive :机械单元启动;18、TaskExecution :执行已配置任务时输出;19、MechanicalUnitNotMoving:机械单元不在运动
6、中;20、ProductionExecutionError:生产发生错误;21、Backupinprogress :正在进行备份;22、Backuperror :备份失败时输出;23、SimMode :仿真模式下输出;24、LimitSpeed :由系统输入信号LimitSpeed 触发;25、CollisionAvoidance :碰撞避免激活时输出,仅限于IRB14000;26、WriteAccess :获得写权限;27、EnergySavingBlocked :节能模式下时输出;28、CPUFanNotRunning :中央处理器散热风扇没有启动;29、TemperatureWarning:温度过高( 95 度);30、AbsoluteAccuracyActive :绝对精度激活时输出;31、SMBBetteryChargeLow :SMB 电池电量过低;系统输入:系统输入的意义为当输入点为1 时对应的功能动作。系统输出:系统输出的意义为当该动作执行时,输出点为1。选择完信号名称、动作后,还要选择扫描类型,有循环扫描 Continuous、有单周期扫描 Cycle。根据实际使用选择。
 ABB机器人系统输入输出功能描述
ABB机器人系统输入输出功能描述