《计算机仿真技术试卷》由会员分享,可在线阅读,更多相关《计算机仿真技术试卷(5页珍藏版)》请在装配图网上搜索。
1、1、 控制系统的分析与设计方法可以分为 时域法 、 频域法 。2、 根据仿真时间与系统实际时钟的关系,控制系统仿真可以分为 实时仿真 、 亚实时仿真 、 超实时仿真 。3、 判断系统稳定性的方法主要有 利用极点判断稳定性 、 利用特征值判断系统稳定性 、 利用李雅普洛夫第二法判断系统稳定性 。4、 常用的离散化方法主要有 简单替换法 、 双线性变换法 、 零阶或一阶保持器法 。5、 根据采样周期的选择不同,采样控制系统仿真可以分为 同步采样 、 异步采样 。6、 增量式PID控制器的表达式为。7、 已知系统脉冲传递函数为,则该系统的差分方程为。8、 已知系统的状态方程为,则该系统是否稳定 是
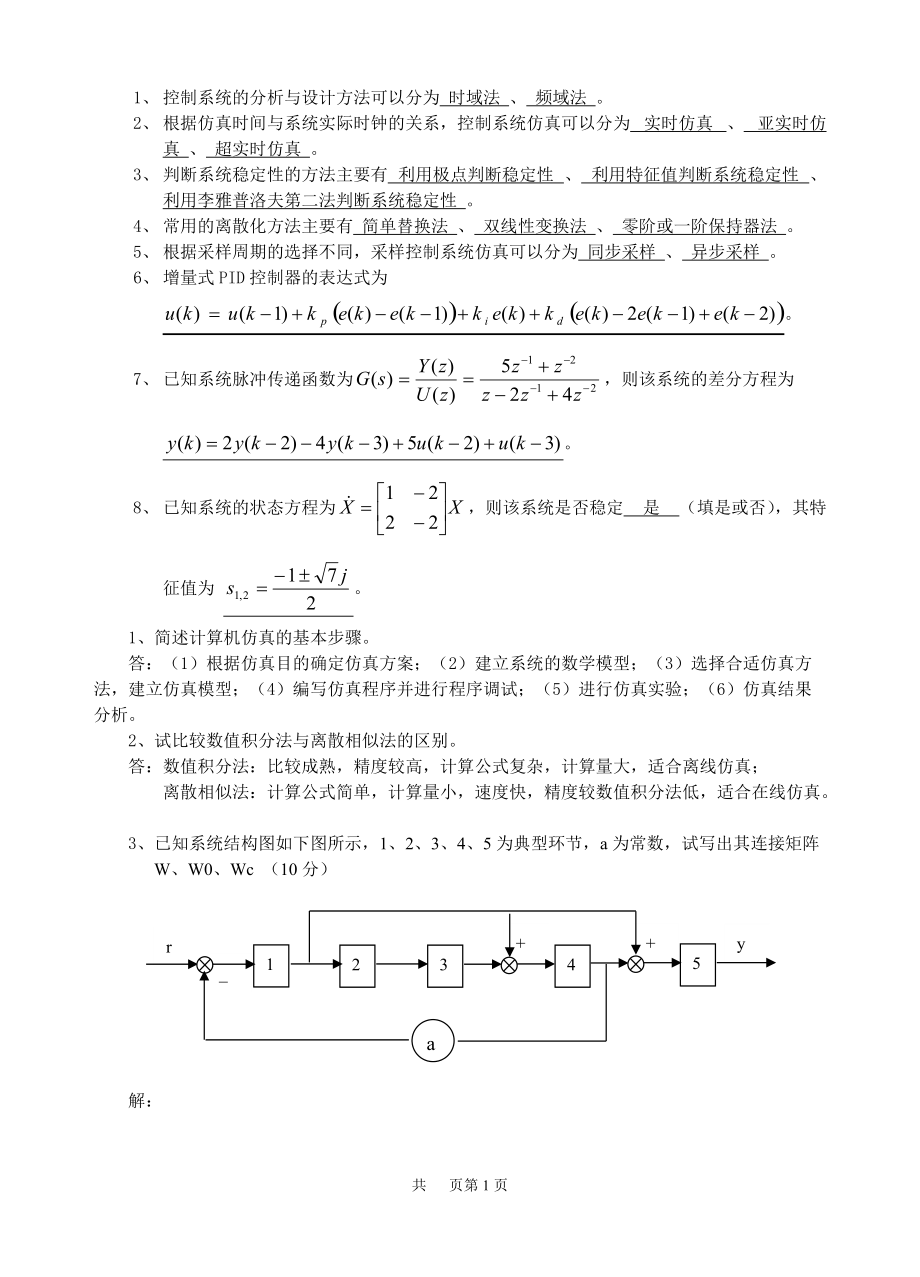
2、(填是或否),其特征值为 。1、简述计算机仿真的基本步骤。答:(1)根据仿真目的确定仿真方案;(2)建立系统的数学模型;(3)选择合适仿真方法,建立仿真模型;(4)编写仿真程序并进行程序调试;(5)进行仿真实验;(6)仿真结果分析。2、试比较数值积分法与离散相似法的区别。答:数值积分法:比较成熟,精度较高,计算公式复杂,计算量大,适合离线仿真; 离散相似法:计算公式简单,计算量小,速度快,精度较数值积分法低,适合在线仿真。3、已知系统结构图如下图所示,1、2、3、4、5为典型环节,a为常数,试写出其连接矩阵W、W0、Wc (10分)yr+_15432a解:由图可知, 从而: 所以:, , 4、
3、已知系统状态空间表达式为,计算步长,输入信号()试采用欧拉法,四阶龙格库塔法计算时对应的值。(12分)解:,欧拉法: 四阶龙格库塔法: 5、已知系统传递函数,试采用双线性变换法求解系统差分方程,计算步长h0.1s (10分)。 解:把双线性变换公式待入系统传递函数: 反z变换得系统差分方程为:三、程序编制题(共37分)1、已知线性定常系统的状态空间表达式为 初始状态为零,试分别采用欧拉法和四阶龙格库塔法编写仿真程序求解系统的单位阶跃响应 解:欧拉法程序如下: A = 0 1;-5 -6; B = 2 ; 0; C = 1 ; 2; Tf=input(仿真时间Tf=);h=input(计算步长h
4、=);X=zeros(size(A,1),1);y=0; t=0; r=1; for i=1:Tf/h X=X+h*(A*X+B*r) ; y=y,C*X ; t=t,t(i)+h ; end plot(t, y) ; 四阶龙格库塔法程序如下:A = 0 1;-5 -6; B = 2 ; 0; C = 1 ; 2; Tf=input(仿真时间Tf=);h=input(计算步长h=);X=zeros(size(A,1),1);y=0; t=0; r=1; for i=1:Tf/h K1=A*X+B*r; K2=A*(X+h*K1/2)+B*r; K3=A*(X+h*K2/2)+B*r;K4=A*
5、(X+h*K3)+B*r; X=X+h*(K1+2*K2+2*K3+K4)/6; y=y,C*X ; t=t,t(i)+h ; end plot(t, y) ; 2、已知某系统结构图如下: r=1 y_+试编写程序求:(12分)(1) 判断系统稳定性;(2) 求解系统单位阶跃响应、最大超调量和上升时间。解:程序清单如下: n1,d1 = series(1,1,1,1,1,2); n2,d2 = series(n1,d1,2,1,3);num,den=cloop(n2,d2);P=roots(den);i=find(real(P)0);n=length(i);if n0 disp(系统不稳定);
6、else disp(系统稳定);end t=0:0.1:10;y,x,t=step(num,den,t);plot(t,y);M,lab=max(y);M=(M-1)/1*100;disp(最大超调量M= num2str(M) %);Val,lab1=min(abs(y(1:lab)-1);Tr=t(lab1);disp(上升时间tr= num2str(tr); 3、设被控对象为:,系统为单位负反馈,采用为增量式PID控制器。试编写仿真程序求解系统单位阶跃响应。(假设系统为同步采样,PID参数采用input语句输入)(12分)解:程序清单如下: clear all T=0.01; Kp=inp
7、ut(Kp=); Ti=input(Ti=); Td=input(Td=); Tf=input(仿真时间Tf=); a1=Kp; a2=Kp*T/Ti; a3=Kp*Td/T; numc,denc=cloop(40,1,30,1); A,B,C,D=tf2ss(numc,denc); G,H,C,D=c2dm(A,B,C,D, T,zoh); u_1=0; e=0; e_1=0; e_2=0; x=zeros(size(A,1), 1); y=0; t=0; for i=1:Tf/T u=u_1+a1*(e-e_1)+a2*e+a3*(e-2*e_1+e_2); x=G*x+H*u; y=y, C*x+D*u; t=t,t(i)+T; e_2=e_1; e_1=e; e=1-y(end); u_1=u; end plot(t,y);5第 页 共 5 页
 计算机仿真技术试卷
计算机仿真技术试卷