 《Kalman滤波原理及程序(手册)》
《Kalman滤波原理及程序(手册)》

《《Kalman滤波原理及程序(手册)》》由会员分享,可在线阅读,更多相关《《Kalman滤波原理及程序(手册)》(13页珍藏版)》请在装配图网上搜索。
1、Kalman滤波原理及程序KF/EKF/UKF原理+应用实例+MATLAB程序本手册的研究内容主要有Kalman滤波,扩展Kalman滤波,无迹Kalman滤波等,包括理论介绍和MATLAB源程序两部分。本手册所介绍的线性滤波器,主要是Kalman滤波和-滤波,交互多模型Kalman滤波,这些算法的应用领域主要有温度测量、自由落体,GPS导航、石油地震勘探、视频图像中的目标检测和跟踪。EKF和UKF主要在非线性领域有着重要的应用,目标跟踪是最主要的非线性领域应用之一,除了讲解目标跟踪外,还介绍了通用非线性系统的EKF和UKF滤波处理问题,相信读者可以通过学习本文通用的非线性系统,能快速掌握EK
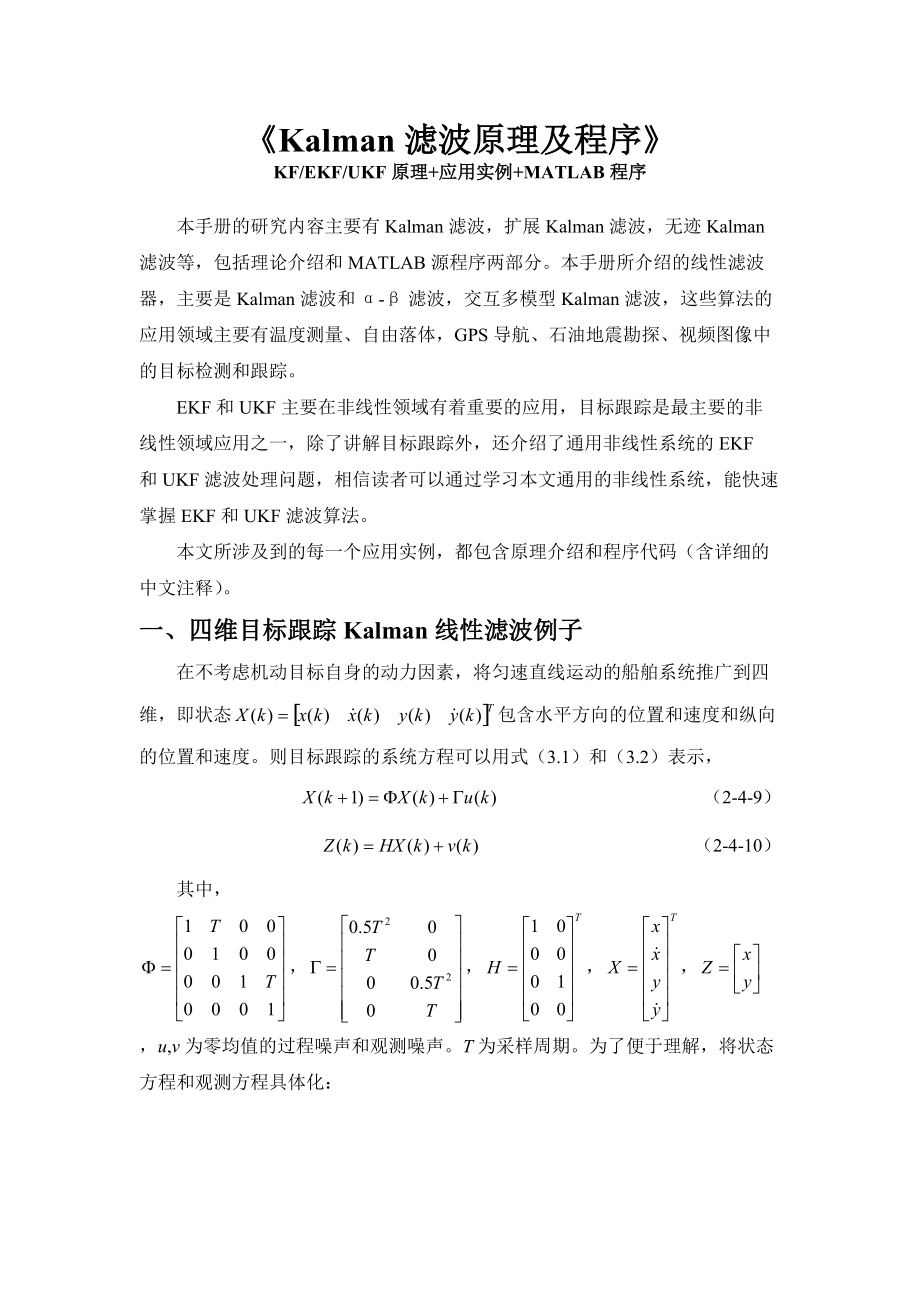
2、F和UKF滤波算法。本文所涉及到的每一个应用实例,都包含原理介绍和程序代码(含详细的中文注释)。一、四维目标跟踪Kalman线性滤波例子在不考虑机动目标自身的动力因素,将匀速直线运动的船舶系统推广到四维,即状态包含水平方向的位置和速度和纵向的位置和速度。则目标跟踪的系统方程可以用式(3.1)和(3.2)表示, (2-4-9) (2-4-10)其中,u,v为零均值的过程噪声和观测噪声。T为采样周期。为了便于理解,将状态方程和观测方程具体化:假定船舶在二维水平面上运动,初始位置为(-100m,200m),水平运动速度为2m/s,垂直方向的运动速度为20 m/s,GPS接收机的扫描周期为T=1s,观
3、测噪声的均值为0,方差为100。过程噪声越小,目标越接近匀速直线运动,反之,则为曲线运动。仿真得到以下结果:图3-1 跟踪轨迹图 图3-2 跟踪误差图仿真程序% Kalman滤波在目标跟踪中的应用实例%function Kalmanclc;clear;T=1;%雷达扫描周期,N=80/T; %总的采样次数X=zeros(4,N); % 目标真实位置、速度X(:,1)=-100,2,200,20;% 目标初始位置、速度Z=zeros(2,N); % 传感器对位置的观测Z(:,1)=X(1,1),X(3,1); % 观测初始化delta_w=1e-2; %如果增大这个参数,目标真实轨迹就是曲线了Q
4、=delta_w*diag(0.5,1,0.5,1) ; % 过程噪声均值R=100*eye(2); %观测噪声均值F=1,T,0,0;0,1,0,0;0,0,1,T;0,0,0,1; % 状态转移矩阵H=1,0,0,0;0,0,1,0; % 观测矩阵二、视频图像目标跟踪Kalman滤波算法实例如下图所示,对于自由下落的皮球,要在视频中检测目标,这里主要检测目标中心,即红心皮球的重心,在模型建立时可以将该重心抽象成为一个质点,坐标为。 图2-6-1 下落的球 图2-6-2 检测下落的球 图2-6-3 跟踪下落的球那么对该质点跟踪,它的状态为,状态方程如下观测方程为在这个过程中,前提是目标检测,
5、一定要找到重心,与雷达目标跟踪中观测目标位置是一回事。图像目标检测跟踪程序% 目标检测函数,这个函数主要完成将目标从背景中提取出来%function detectclear,clc; %清除所有内存变量、图形窗口% 计算背景图片数目Imzero = zeros(240,320,3);for i = 1:5 % 将图像文件 i.jpg 的图像像素数据读入矩阵Im Imi = double(imread(DATA/,int2str(i),.jpg); Imzero = Imi+Imzero;endImback = Imzero/5;MR,MC,Dim = size(Imback);% 遍历所有图片
6、for i = 1 : 60% 读取所有帧运行程序得到的x,y方向的位置跟踪偏差分析Y方向的位置偏差X方向的位置偏差三、通用非线性系统的EKF实现例子:所谓的非线性方程,就是因变量与自变量的关系不是线性的,这类方程很多,例如平方关系,对数关系,指数关系,三角函数关系等等。这些方程可分为两类,一类是多项式方程,一种是非多项式方程。为了便于说明非线性卡尔曼滤波扩展Kalman滤波的原理,我们选用以下系统,系统状态为,它仅包含一维变量,即,系统状态方程为 (3-2-1)观测方程为 (3-2-2)其中,式(3-1-1)是包含分式,平方,三角函数在内的严重非线性的方程,为过程噪声,其均值为0,方差为Q,
7、观测方程中,观测信号与状态的关系也是非线性的,也是均值为0,方差为R的高斯白噪声。因此关于(3-1-1)和(3-2-2)是一个状态和观测都为非线性的一维系统。以此为通用的非线性方程的代表,接下来讲述如何用扩展Kalman滤波来处理噪声问题。第一步:初始化初始状态,协防差矩阵。第二步:状态预测 (3-2-3)第三步:观测预测 (3-2-4)第九步:协方差更新 (3-2-10)以上九步为扩展卡尔曼滤波的一个计算周期,如此循环下去就是各个时刻EKF对非线性系统的处理过程。其他参数设置请查看源程序,仿真以上系统得到状态滤波结果,如图3-2-1所示,滤波后的状态与真值之间的偏差如图图3-2-2所示。 图
8、3-2-1 EKF滤波处理后的状态与真值对比 图3-2-2 偏差分析EKF一维非线性系统仿真程序% 函数功能:一维非线性系统扩展Kalman滤波问题% 状态函数:X(k+1)=0.5X(k)+2.5X(k)/(1+X(k)2)+8cos(1.2k) +w(k)% 观测方程:Z(k)=X(k)2/20 +v(k)%function EKF_for_One_Div_UnLine_System% 初始化T=50; % 总时间Q=10;R=1;% 产生过程噪声w=sqrt(Q)*randn(1,T);% 产生观测噪声v=sqrt(R)*randn(1,T);四、EKF在纯方位寻的导弹制导中的应用例子:
9、考虑一个在三维平面x-y-z内运动的质点M,其在某一时刻k的位置、速度和加速度可用矢量可以表示为:质点M可以在三维空间内做任何运动,同时假设三个x-y-z方向上运动具有加性系统噪声,则在笛卡尔坐标系下该质点的运动状态方程为:通常情况下,上述方程为线性的,即能表示为以下方式,其中,为测量周期,也叫扫描周期,采样时间间隔等。动态噪声为而且,是高斯型白色随机向量序列。现在考虑一个带有观测器的飞行中的导弹,可以假设为质点M,对移动的目标进行观测,如下图所示,导弹与目标的相对位置依然可用x-y-z表示,那么,导弹对目标纯方位角观测,主要是俯仰角和水平方向偏向角,实际测量中雷达具有加性测量噪声,则在笛卡尔
10、坐标系下,观测方程为式中,为测量噪声,他也是高斯型白色随机向量序列,而且,对于,其定义为其中,显然在笛卡尔坐标系下,该模型运动观测方程为非线性的。仿真结果为: 轨迹跟踪图 位置误差 速度误差 加速度误差寻的制导matlab仿真程序% 程序说明:目标跟踪程序,实现运动弹头对运动物体的三维跟踪,主函数% 状态方程: x(t)=Ax(t-1)+Bu(t-1)+w(t)% 参考资料:寻的导弹新型导引第5.5和5.6节中仿真参数设置%function main%delta_t=0.01; % 测量周期,采样周期longa=1; % 机动时间常数的倒数,即机动频率T=3.7/delta_t;% 时间长度3
11、.7秒钟,一共采样T=370次F=eye(3),delta_t*eye(3),(exp(-1*longa*delta_t)+longa*delta_t-1)/longa2*eye(3); zeros(3),eye(3),(1-exp(-1*longa*delta_t)/longa*eye(3); zeros(3),zeros(3),exp(-1*longa*delta_t)*eye(3); % 状态转移矩阵faiG=-1*0.5*delta_t2*eye(3);-1*delta_t*eye(3);zeros(3); % 控制量驱动矩阵gama五、UKF在六维CA目标跟踪模型中的应用例子:一、仿
12、真问题描述考虑一个在二维平面x-y内运动的质点M,其在某一时刻k的位置、速度和加速度可用矢量表示。假设M在水平方向(x)作近似匀加速直线运动,垂直方向(y)上亦作近似匀加速直线运动。两方向上运动具有加性系统噪声,则在笛卡尔坐标系下该质点的运动状态方程为其中假设一坐标位置为(0,0)的雷达对M进行测距和测角,实际测量中雷达具有加性测量噪声,则在传感器极坐标系下,观测方程为显然在笛卡尔坐标系下,该模型运动观测方程为非线性的。我们根据雷达测量值使用UKF算法对目标进行跟踪,并与EKF算法结果进行比较。三、实验仿真与结果分析假设设系统噪声具有协方差阵,具有协方差阵,二者不相关。观测次数N=50,采样时
13、间为t=0.5。初始状态。则生成的运动轨迹如图1所示。轨迹跟踪图4.3.2 仿真程序% 功能说明: UKF在目标跟踪中的应用% 参数说明: 状态6维,x方向的位置、速度、加速度;y方向的位置、速度、加速度;% 观测信息为距离和角度;%function ukf_for_track_6_div_system%n=6; % 状态位数t=0.5; % 采样时间Q=1 0 0 0 0 0; 0 1 0 0 0 0; 0 0 0.01 0 0 0; 0 0 0 0.01 0 0; 0 0 0 0 0.0001 0; 0 0 0 0 0 0.0001;%过程噪声协方差阵R = 100 0; 0 0.0012
14、;%量测噪声协方差阵% 状态方程目 录第一章 Kalman滤波概述11.1 kalman滤波的背景11.2 kalman滤波的发展过程31.3 kalman滤波应用领域5第二章 线性卡尔曼滤波62.1 Kalman滤波原理62.1.1 射影定理62.1.2 Kalman滤波原理推导82.1.3 Kalman滤波过程描述102.2 Kalman滤波在温度测量中的应用122.2.1 原理介绍122.2.1 matlab仿真程序132.3 Kalman滤波在自由落体中的应用142.3.1 原理介绍142.3.2 Matlab仿真程序192.3.3 C语言程序202.4 Kalman滤波在船舶GPS导
15、航定位系统中的应用222.4.1 原理介绍222.4.2 matlab仿真程序252.5 Kalman滤波在石油地震勘探中的应用262.5.1 石油地震勘探白噪声反卷积滤波原理262.5.2 石油地震勘探白噪声反卷积滤波仿真程序282.6 Kalman滤波在视频图像目标跟踪中的应用312.6.1 视频图像处理的基本方法及程序312.6.2 Kalman滤波对自由下落的皮球跟踪应用332.6.3 目标检测程序332.6.4 Kalman滤波视频跟踪程序35第三章 扩展卡尔曼滤波EKF373.1 扩展Kalman滤波原理373.2 扩展卡尔曼在一维非线性系统中的应用383.2.1 状态方程和观测方
16、程都为非线性的通用系统383.2.2 EKF一维非线性系统仿真程序403.3 扩展卡尔曼在二维非线性系统中的应用413.3.1 状态方程和观测方程都为非线性的通用二维系统413.3.2 EKF二维非线性系统仿真程序433.4 扩展卡尔曼在二维目标跟踪中的应用443.4.1 基于观测距离的EKF目标跟踪算法443.4.2跟踪算法matlab程序443.4.3 基于纯方位的EKF目标跟踪算法463.4.4纯方位目标跟踪算法matlab程序473.5 EKF在纯方位寻的导弹制导中的应用483.5.1 三维寻的制导系统483.5.2 寻的制导matlab仿真程序52第四章 无迹卡尔曼滤波UKF554.
17、1 无迹Kalman滤波原理554.1.1 UT变换554.1.2 无迹卡尔曼原理564.2 UKF在单站二维目标跟踪中的应用574.2.1 原理介绍574.2.2 仿真程序574.3 UKF在六维CA目标跟踪模型中的应用604.3.1 原理介绍604.3.2 仿真程序62第五章 交互多模型卡尔曼滤波655.1交互多模型Kalman滤波(IMM)655.1.1 交互多模原理655.1.2 仿真方法665.2交互多模型Kalman滤波在目标跟踪中应用705.2.1 仿真分析705.2.2 IMM仿真程序71第六章 自校正-跟踪滤波器766.1 自校正-跟踪滤波器766.2 自校正-跟踪滤波器在雷达跟踪系统中的应用786.2.1 跟踪系统介绍786.2.2 自校正-跟踪滤波器仿真程序806.2.3 Gevers-Wouters算法仿真程序816.2.4 递推增广最小二乘自校正算法程序826.3 含未知模型参数的自校正-跟踪滤波器836.3.1 原理介绍836.3.2 仿真程序85本书的网址链接:
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
