 《理论力学》静力学典型习题+答案
《理论力学》静力学典型习题+答案

《《理论力学》静力学典型习题+答案》由会员分享,可在线阅读,更多相关《《理论力学》静力学典型习题+答案(46页珍藏版)》请在装配图网上搜索。
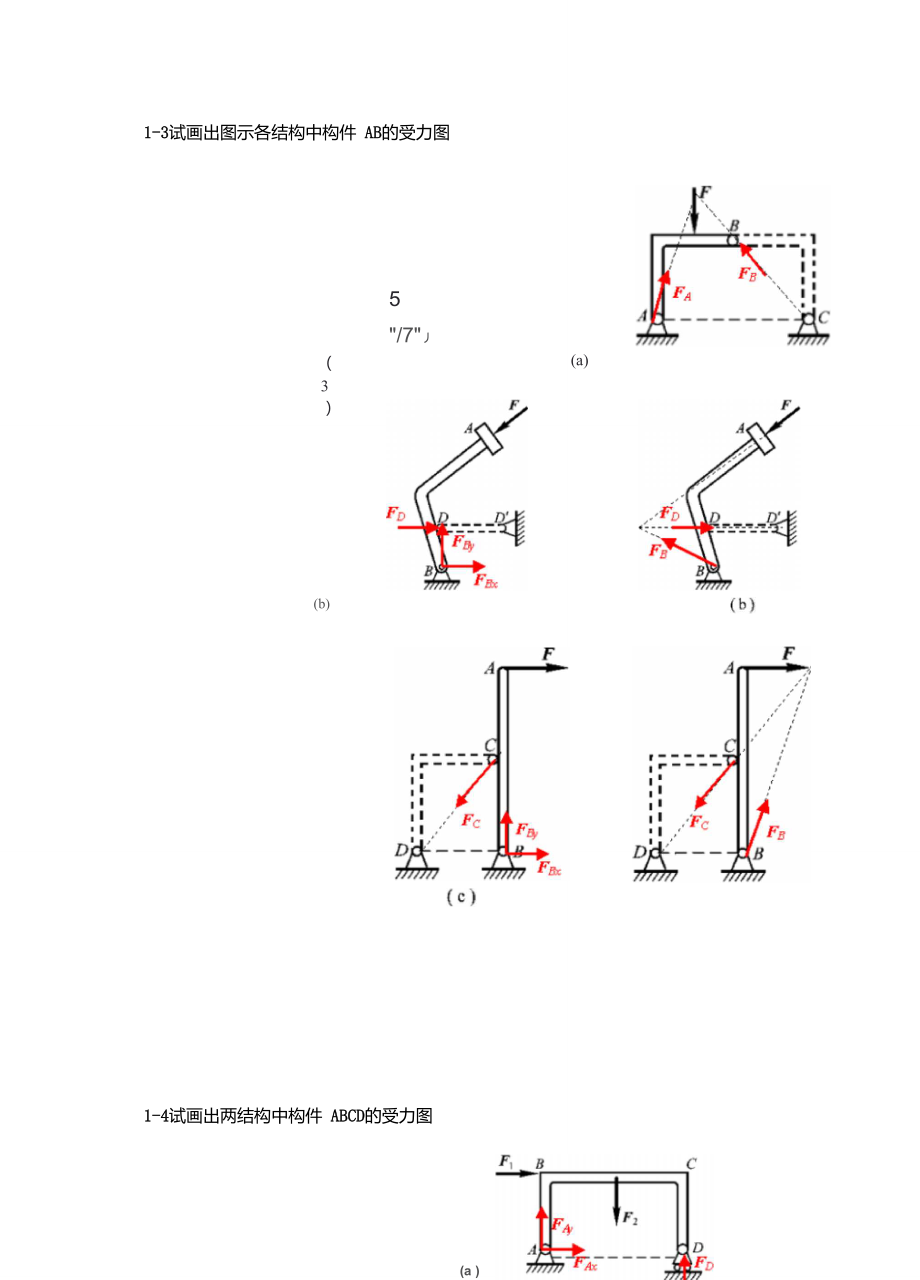
1、1-3试画出图示各结构中构件 AB的受力图5/7丿(a)(3)(b)1-4试画出两结构中构件 ABCD的受力图(a )1-5试画出图a和b所示刚体系整体各个构件的受力图5aZVA示位置平衡。试求二力Fi和F2之间的关系。Fi和F2,机构在图X1- 8在四连杆机构的ABCD的铰链B和C上分别作用有力解:杆AB,BC,CD为二力杆,受力方向分别沿着各杆端点连线的方向。解法1(解析法)假设各杆受压,分别选取销钉 B和C为研究对象,受力如图所示:由共点力系平衡方程,对B点有: Fx =0F2 - Fbc cos 45对C点有: Fx =0Fbc 一 F1 cos30解以上二个方程可得:尺=2 6 F2
2、 =1.63F23解法2(几何法)分别选取销钉B和C为研究对象,根据汇交力系平衡条件,作用在B和C点上的力构成封闭的力多边形,如图所示对B点由几何关系可知:F?二FBC cos45对C点由几何关系可知:Fbc二F1 cos300解以上两式可得:F, =1.63F22-3在图示结构中,二曲杆重不计,曲杆 点处的约束力。AB上作用有主动力偶 M试求A和C解:BC为二力杆(受力如图所示),故曲杆AB在B点处受到约束力的方向沿 BC 两点连线的方向。曲杆 AB受到主动力偶M的作用,A点和B点处的约束力必须 构成一个力偶才能使曲杆AB保持平衡。AB受力如图所示,由力偶系作用下刚体 的平衡方程有(设力偶逆
3、时针为正):送 M = 0 Fasin(B + 450) _ M = 0FA = 0.354Ma其中:tan1。对 BC杆有:FC 二 FB 二 FA 二 0.354M3aA,C两点约束力的方向如图所示。2-4Fe0ocFrRo MF3FaFbMa2-6求最后简化结果解:机构中AB杆为二力杆,点A,B出的约束力方向即可确定。由力偶系作用下 刚体的平衡条件,点 O,C处的约束力方向也可确定,各杆的受力如图所示。对对AB杆有:对OA杆有:求解以上三式可得:M, =3N E,FAB = FO = FC = 5N ,方向如图所示。II方向如左图所示。由于Fr - M a,可进一步简化为一个不过 A点的
4、力(绿色的),主矢不变,其作用线距A点的距离d = 3a,位置如左图所示42-6b同理如右图所示,可将该力系简化为一个不过 A点的力(绿色的),主矢为:BC杆有: M = 0M, - Fa OA = 0解:2-6a坐标如图所示,各力可表示为:1 3F,Fi Fj,F Fi,2 2先将力系向A点简化得(红色的):】Fi仝Fj2 2Fak20Fb BC sin30 - M 0Fr 二 Fi 3Fj,Fr 2Fi其作用线距A点的距离d =,位置如右图所示。4简化中心的选取不同,是否影响 最后的简化结果? 是2-13解:整个结构处于平衡状态。选择滑轮为研究对象,受力如图,列平衡方程(坐 标一般以水平向
5、右为x轴正向,竖直向上为y轴正向,力偶以逆时针为正): Fx=0Ps= - FBx =0 Fy=0FBy -P - Pcos: = 0选梁AB为研究对象,受力如图,列平衡方程: Fx=0Fax -Fbx = 0 Fy=0FAy -FBy 7 M A = 0 M A _ FBy I = 0求解以上五个方程,可得五个未知量 FgFAy, FBx, FBy, M A分别为:Fax二FBx =-Psin(与图示方向相反)Fa Fb P(1 cos )(与图示方向相同)M P(1 cos )I (逆时针方向)1- 18解:选AB杆为研究对象,受力如图所示,列平衡方程:ai M a = 0Nd- G co
6、s: -Fl co = 0cos:2 Fy =0Nd cos: - G - F =0求解以上两个方程即可求得两个未知量 NdF,其中:1二 arccos2(F G)a3 (2F G)l 未知量不一定是力以下几题可看一看!2-27解:选杆AB为研究对象,受力如下图所示。列平衡方程:(运用力对轴之矩!)1 M y = 0 Pctan: - Fbc cos c 一 FBC sin ctan: - 02Fbc 二 60.6N、Mxc - FBC sinFb =100N由v Fy = 0和v Fz二0可求出FAy,FAz。平衡方程v M x二0可用来校核 思考题:对该刚体独立的平衡方程数目是几个?2-2
7、9解:杆1, 2, 3, 4, 5, 6均为二力杆,受力方向沿两端点连线方向,假设各杆 均受压。选板ABCE为研究对象,受力如图所示,该力系为空间任意力系。采用 六矩式平衡方程:、M de = F2 cos450 = 0F2 = 0M AOF6 cos450F cos450 cos450 a = 0M BH-F4 cos450F6 cos450 a = 0F4F(受压)2M ADF1 a F6 cos450 a - F sin 450 a = 0F 12F(受压)2、Mcd = 0Fi a F3 a - Fsin450 a = 0F3 = -F(受拉)20M bc = 0F3 a F5 a -
8、 F4 cos45 a = 0F5 = 0本题也可以采用空间任意力系标准式平衡方程,但求解代数方程组非常麻烦。类似本题的情况采用六矩式方程比较方便,适当的选择六根轴 保证一个方程求解一 个未知量,避免求解联立方程。2-31 力偶矩 M 二 1500N cm解:取棒料为研究对象,受力如图所示。列平衡方程 :* Fx =0匸 + pcos45 N2 = 0送 Fy =0 F2 _ psin 450 + N1 = 0M。(R F2)卫 _ m = 0 . 2补充方程:Fi _ fsNiIF? = fsN五个方程,五个未知量F!,N!,F2,N2, fs,可得方程:2M f; - 2p D fs 2M
9、 = 0解得 fS1 = 0.223, fS2 二 4.491。当 fS2 二 4.491 时有:P(1 二 fs2)2(厂fs22)即棒料左侧脱离V型槽,与提议不符,故摩擦系数 fs =0.2232-33解:当:=450时,取杆AB为研究对象,受力如图所示 列平衡方程:v Fx = 00 Ma =0Fn - T si= 0Fs +T cosB - p = 0_ABT cosr AC sin: - T siAC cos: - p sin : = 0I2附加方程:Fs二fsFN 四个方程,四个未知量Fn,Fs,T, fs,可求得fs = 0.646。2-35解:选棱柱体为研究对象,受力如图所示。
10、假设棱柱边长为a,重为P,列平衡方程: Ma =0 Mb =0.送巳=0aa小1Fnb a - P COS+ P sin。01122 3a .a小1 -Fna a P cosP sin0122、31ffF aF b-Psin:二0二 fsNA如果棱柱不滑动,则满足补充方程Fa时处于极限平衡状态。解以上Fb二 fs 2 FnB五个方程,可求解五个未知量Fa , Fna, Fb , Fnb,其中:(1)3亿fs2)s1s2当物体不翻倒时Fnb - 0,贝u:tan:乞 600即斜面倾角必须同时满足(1)式和 式,棱柱才能保持平衡2- 10解:假设杆AB , DE长为2a。取整体为研究对 象,受力如
11、右图所示,列平衡方程:衡方程:、Mh二 0Fy a - F a = 0 Fd=FMb=0Fdx a - F 2a = 0Fdx = 2F取杆DE为研究对象,受力如图所示,列平取杆AB为研究对象,受力如图所示,列平衡方程: Fy = 0FAyFyFBy = 0 M A = 0Fdx a Fbx 2a = 0 M B = 0-Fax 2a - Fdx a = 0/Ay = -F (与假设方向相反)FBx二- F (与假设方向相反)Fax = -F (与假设方向相反)3-12bFdM c = 0Fb2a = 0Fb 0解:取整体为研究对象,受力如图所示,列平衡方程:x Me =0Fd b - F x
12、 = 0f - -Fb取杆AB为研究对象,受力如图所示,列平衡方程: M 人=0 Fb b - F x = 0fb = X Fb杆AB为二力杆,假设其受压。取杆 AB和AD构成的组合体为研究对象,受力 如图所示,列平衡方程: Me =0 (Fb Fd) - F (B-x)-Fac 02 2 2解得Fac二F,命题得证。注意:销钉A和C联接三个物体。3-14解:取整体为研究对象,由于平衡条件可知该力系对任一点之矩为零,因此有:Ma =0Ma(Fb)-M M =0即Fb必过A点,同理可得Fa必过B点。也就是fa和Fb是大小相等,方向相反 且共线的一对力,如图所示。取板AC为研究对象,受力如图所示,
13、列平衡方程: M C = 0Fa sin 450 a - FA cos450 b - M = 0 M C = 0Fa sin 450 a - FA cos450 b - M = 0解得:fA2M (方向如图所示)-b3-20解:支撑杆2, 3为二力杆,假设各杆均受压。选梁 BC为研究对象,受力如 图所示。其中均布载荷可以向梁的中点简化为一个集中力, BC杆中点。列平衡方程:1,大小为2qa,作用在Mb =0 F3sin450 a - 2qa a - M = 0f3二 2(- 2qa)(受压)A/D选支撑杆销钉为研究对象,受力如右图所示。列平衡方程:xFx=0R - F3 cos450 二 0-
14、 F2 - F3 sin45 = 0F -( 2qa)(受拉)aP7B列平衡方程:选梁AB和BC为研究对象,受力如图所示。Fax F3 COS450 二 0 FAx-(-2qa)(与假设方向相反) aFAy F2 F3 sin 450 - P - 4qa = 0 FAy = P 4qaAyM a F2 a - P 2a - 4qa 2a F3sin450 3a - M = 0Ma = 4qa2 2Pa- M (逆时针) F0 FaxFbxF =03-21解:选整体为研究对象,受力如右图所示 列平衡方程: Ma = 0 FBy 2a 一 F 2a = 0Fb F Mb = 0 - FAy 2a
15、- F 2a = 0 Fa -FG,受由题可知杆DG为二力杆,选GE为研究对象,作用于其上的力汇交于点力如图所示,画出力的三角形,由几何关系可得:Fe = 2 FE 2取CEB为研究对象,受力如图所示。列平衡方程: M c = 0Fbx a FBy a 一 Fe sin 45 a = 0FBx =-匸2代入公式(1)可得:Fax =3-24解:取杆AB为研究对象,设杆重为P,受力如图所示。列平衡方程:Ma =0N, 3r - P 3r cos60 0N厂 6.93(N)2 Fx =0Fax - NiSin60 = 0= 6(N) Fy =0FAy -叫迹600 - P = 0Fa 12.5(N
16、)取圆柱C为研究对象,受力如图所示。列平衡方程: Fx = 0 Ni cos300 - T cos300 = 0T = 6.93(N)注意:由于绳子也拴在销钉上,因此以整体为研究对象求得的A处的约束力不是杆AB对销钉的作用力。3-27解:取整体为研究对象,设杆长为 L,重为P,受力如图所示。列平衡方程:Lp Ma = 0 Fn 2Lsin 2P cos0Fn(1)22ta n 日取杆BC为研究对象,受力如图所示。列平衡方程: Mb = 0 Fn Lsin P Lcos: - Fs Lcos - 0F P (2)2补充方程:Fs乞fs Fn,将式和(2)式代入有:taM 主,即厂100。23-2
17、9 ()证明:(1)不计圆柱重量法1:取圆柱为研究对象,圆柱在 C点和D点分别受到法向约束力和摩擦力的作用,分别以全约束力FrC,Frd来表示,如图所示。如圆柱不被挤出而处于平衡状态,则Frc,Frd等值,反向,共线。由几何关系可知,Frc,Frd与接触点C,D处法oBBoABBAaJ00FAyFaxF NDF SCF ND Fxsin : FF NC M。= 0sin : FF ND1 cos:1 cos:线方向的夹角都是,因此只要接触面的摩擦角大于 1,不论F多大,圆柱不2 2会挤出,而处于自锁状态法2 (解析法):首先取整体为研究对象,受力如图所示。列平衡方程:再取杆AB为研究对象,受力
18、如图所示。列平衡方程:FDa取圆柱为研究对象,受力如图所示。假设圆柱半径为R,列平衡方程:FscR- Fsd R = 0Fnc sin : - Fsc cos: MA = 0Fnd a - F I = 0 MA = 0Fnc a - F I = 0Fca由补充方程:Fsc空fsc Fnc,Fsd空fsD Fnd,可得如果:Si naaafsc -,fsD1 + cosa22则不论F多大,圆柱都不被挤出,而处于自锁状态。证明:(2)圆柱重量P时Frc , Frd。如果圆柱保持平衡,取圆柱为研究对象,此时作用在圆柱上的力有重力 P,C点和D点处的全约束力则三力必汇交于D点(如图所示)。全约束力Fr
19、c与C点处法线方向的夹角仍为I,因此如果圆柱自锁在C点必须满足:21 + COP该结果与不计圆柱重量时相同。a=ta n 2只满足(1)式时C点无相对滑动,但在D点有可能滑动(圆柱作纯滚动)。再选杆AB为研究对象,对A点取矩可得由几何关系可得:a lFtan2 aFF RCFlaa cos2法1 (几何法):BRDPRDFrc0 0 :-sin180 - 一(180 -?)圆柱保持平衡,则作用在其上的三个力构成封闭得力三角形,如图所示。由几何关系可知:PFrcsin将(2)式代入可得:Fl sina tan(Pa + Fl )(1 + cost)因此如果圆柱自锁在D点必须满足:fsD _ ta
20、n -Flsin:SD(Pa + Fl )(1 + cost)即当同时满足式和(3)式时,圆柱自锁,命题得证。法2 (解析法):取圆柱为研究对象,受力如图所示,列平衡方程: Fx = 0Fnc sin : - Fsc cos: - F$d = 0 Fy = 0Fnd - P - Fsc Sin: - Fnc COS:二 0lFl解得:Fsc 二 Fsd 二 tan F, Fnd 二 P (cos: sin: tan )2 aa2代入补充方程:Fsd乞fSD Fnd,可得如果圆柱自锁在D点必须满足:f _tan =Fl sin: (3)SD(Pa+ Fl)(1 + co沪)即当同时满足式和(3)
21、式时,圆柱自锁,命题得证。3-30解:取整体为研究对象,受力如图所示,列平衡方程:工 Fx = 0 Fsd Fse = 0Z F= 0 .Fnd + Fne - F - 2P = 0Ly由题可知,杆AC为二力杆。作用在杆BC上的力有主动力F,以及B和C处的约束力FB和FAC,由三力平衡汇交,可确定约束力 FB和FAC的方向如图所示,o7R90BEMEL T其中:tanr = 1,杆AC受压3取轮A为研究对象,受力如图所示,设Fac的作用线与水平面交于F点,列平衡方程:方程:解以上六个方程,可得:Md - Fnd,Me 一 Fne,Fsd 空 fsFND,Fs fsFNEMa=0FsdR _ M
22、 d = 0 MF =0(Fnd - P) R - M D = 0取轮B为研究对象,受力如图所示,设Fb的作用线与水平面交于G点,列平衡 MB =0Me _Fse 只=0Mg =0Fn p - F,4Fn P 3f,4若结构保持平衡,则必须同时满足:(P - Fne) Rta二 01Fse=4F,1Md 二 Me 二一FR4即:F mmin 4R -6p, 4 p,4fsP,4fsPR -3、1 - fs 1 - 3fs4、.R 一、因此平衡时F的最大值Fmax = 0.36,此时:Fsd = Fse = 0.091(N), Md = Me =0.91(N cm)3-35解:由图可见杆桁架结构
23、中杆 CF, FG, EH为零力杆。用剖面SS将该结构分为 两部分,取上面部分为研究对象,受力如图所示,列平衡方程:F厂-14.58(kN)(受拉) M C = 0 F-! cost 6 Fh 4 - Fg 3 = 0Fx= 0- F1 si- F3 - FH = 0F-31.3(受拉)Fy= 0F2 - F1 co - Fg = 0F2 二18.3(受压)3-38解:假设各杆均受压。取三角形BCG为研究对象,受力如图所示。列平衡方程: Fx = 0 F - Fcd = 0Fcd = F (受压)Fg取节点C为研究对象,受力如图所示。列平衡方程:F Fx = 0: Fbc COS450 - F
24、cd - Fcg co矽=0l送 Fy = 0Fbc sin450 + FCG sin日=0其中:tan= 12,解以上两个方程可得:FBC = 0.586 F (受压)2 + V23-40解:取整体为研究对象,受力如图所示。列平衡方程:二 M a = 0Fb 2a - F 2a - F 3a = 0 FB 二 2.5F1 cF用截面S-S将桁架结构分为两部分,假设各杆件受拉,取右边部分为研究对象, 受力如图所示。列平衡方程:E M C = 0 FB a + F a - F2 3a = 0f2 = 7 F (受拉)2 6 Fx = 0 2F - F2 = 0F1 = 5 F (受拉)64-1f
25、 Fm解:1. 选定由杆OA OC, DE组成的系统为研究对象,该系统具有理想约束。作用在 系统上的主动力为F , Fm。2. 该系统的位置可通过杆OA与水平方向的夹角B完全确定,有一个自由度。选 参数9为广义坐标。3. 在图示位置,不破坏约束的前提下,假定杆 OA有一个微小的转角S 9,相应 的各点的虚位移如下:rA = O A ,b = O Bv,r =O1CG = O1Dr,* 二 L,G 二I代入可得::.rA = 30 : rE4. 由虚位移原理v.W(Fi)二0有:F Fm e=(30F-Fm) J。对任意rE = 0有:Fm = 30F,物体所受的挤压力的方向竖直向下。4-4解:
26、4a1. 选杆AB为研究对象,该系统具有理想约束。设杆重为 P,作用在杆上的主动力 为重力。2. 该系统的位置可通过杆AB与z轴的夹角9完全确定,有一个自由度。选参数9为广义坐标。由几何关系可知:h二 3tan日杆的质心坐标可表示为:z”a - l cos,tan 23. 在平衡位置,不破坏约束的前提下,假定杆 AB逆时针旋转一个微小的角度 S 9,则质心C的虚位移:4.由虚位移原理、W (FJ =0有:(-冷WO6对任意u 0 有:2sin 即杆AB平衡时:(a)1)30PB解:4b1. 选杆AB为研究对象,该系统具有理想约束。 为重力2. 该系统的位置可通过杆 AB与z轴的夹角设杆重为P,
27、作用在杆上的主动力B完全确定,有一个自由度。选参数B为广义坐标。由几何关系可知:Za66杆的质心坐标可表示为:Zc1cos26AB顺时针旋转一个微小的角度3. 在平衡位置,不破坏约束的前提下,假定杆S 9,则质心C的虚位移:亠os-sin 二4.由虚位移原理、:W ( FJRl-Pzc = - P (2cossin 二)J - 0sin 日2对任意“ -0有:RI2cossinr - 0sin 二2即平衡时二角满足:2 R cos v - I sin 3 v - 0。4-5叶*解:1.选整个系统为研究对象,此系统包含弹簧。设弹簧力F, F2,且F F2,将弹簧力视为主动力。此时作用在系统上的主
28、动力有F, F2,以及重力P。2该系统只有一个自由度,选定二为广义坐标。由几何关系可知:zA = zB = a sin -3.在平衡位置,不破坏约束的前提下,假定有一个微小的虚位移s 9,则质心的 虚位移为:zC = zA = Zb = a cos 二 u弹簧的长度l = 2asin =,在微小虚位移s 9下:2Ql = a cos 寸24.由虚位移原理W ( FJ = 0有:ePZc - F? I = (Pa cos t - F2a cos ) ) - 02其中F2二k(2asin二- a),代入上式整理可得:2 2a2 P cos J - ka (2 si n 二-cos )02 2由于a
29、 = 0,对任意宀-0可得平衡时弹簧刚度系数为:,2 P cos 日k =a (2 si- cos )24-6解:解除A端的约束,代之以Fa Fa M A,并将其视为主动力,此外系统还 受到主动力F1, F2, F3, M的作用。系统有三个自由度,选定 A点的位移 xa, yA和梁AC的转角为广义坐标。1 在不破坏约束的前提下给定一组虚位移XA=0, yA 二0,=0,如图所示。由虚位移原理 :W(Fi) = 0有:FaxXa 二 0对任意XA = 0可得:FAX = 02 在不破坏约束的前提下给定一组虚位移XA二 0, yA =0,=0,如下图所示。由虚位移原理 W ( Fi )=0 有:-
30、FAy M h y F2 y - F3% M 宀二 0(1)V 2 m 11 W2 m 11 mr :_3 m “ IL1-0由几何关系可得各点的虚位移如下:yi13 yC代入式:(一Fay Fi对任意、:xA13 yA-M3FAy = 4(kN ),方向如图所示03.在不破坏约束的前提下给定一组虚位移-:xA二0yA = 0,上图所示。由虚位移原理x W (Fi 0有:-M A F1 、y F2 、y2 一 F3 、y3 M 、宀 一 0 有几何关系可得各点的虚位移如下:yi = 2八y3 二 yc 二 3代入式:(-M A 2F1 F2 - 3F3 M ) 二 0对任意、二0可得:M A二
31、7(kN m),逆时针方向。4-7解:将均布载荷简化为作用在 CD中点的集中载荷f3,大小为6q1.求支座B处的约束力解除B点处的约束,代之以力FB ,并将其视为主动力,系统还受到主动力F!, F2, F3, M只能绕C点转动的作用,如图所示。在不破坏约束的前提下,杆AC不动,梁CDB由虚位移原理系统有一个自由度,选转角 二为广义坐标、W(FJ 二 0 有:给定虚位移二,F3 y 二 0(1)FB rB cos 450 M 丿F2 y2cos15O0 -各点的虚位移如下:rB V 2 、宀代入(1)式整理可得:(6Fb M9 3 F2 - 3F3)宀对任意-0可得:Fb二 18 .6(kN )
32、,方向如图所示。2.求固定端A处的约束力解除A端的约束,代之以FaxFAy , M A,并将其视为主动力,系统还受到主动力F1, F2, F3, M的作用。系统有三个自由度,选定A点的位移xa, yA和梁AC的转角二为广义坐标2a.求 FAx在不破坏约束的前提下给定一组虚位移、:Xa = oyA = 0,-时整个结构平移,如上图所示。由虚位移原理 x W ( Fi 0有:FAxxa Fj “ F2x2cos12O0 = 0各点的虚位移如下:Xj = x2 二 xA代入(2)式整理可得:(FaxFl - 0.5F2)X 二 0对任意xA = 0可得: FAx = 2( kN ),方向如图所示。2
33、b.求 fAy在不破坏约束的前提下给定一组虚位移;xA = 0,、;yA = 厂宀_ 0,此时梁AC向上平移,梁 CDB绕D点转动,如上图所示。由虚位移原理 、W(FJ 二 0 有:FAy yA - F3 y3 F2 y2cos30 - M 、二=0各点的虚位移如下:11 11y 二 y3ycyAy?y2236代入(3)式整理可得:131(卩八一 2卩32卩2- $m)、*二o对任意:yA = 0可得: FAy二3.8(kN ),方向如图所示。2c.求 M,此0在不破坏约束的前提下给定一组虚位移、;Xa二0yA二0,宀=0 时梁AC绕A点转动,梁CDB平移,如上图所示。由虚位移原理 W (Fi
34、): 有:-M A 宀 F“ XF2 x2cos 120 0 二 0各点的虚位移如下:Xj = 3 宀x2 二 xC = 6 二代入(4)式整理可得:(-Ma 3F1 - 3F2) - 0对任意宀 0可得:M A - - 24 ( kN m),顺时针方向。4-8解:假设各杆受拉,杆长均为a。1 求杆1受力去掉杆1,代之以力R,系统有一个自由度,选AK与水平方向的夹角二为 广义坐标,如上图所示。在不破坏约束的条件下给定一组虚位移,此时三角形ADK形状不变,绕 A点转动,因此有 d _ AD r rK - A K,且::rD = a 二,:rK = . 3a -滑动支座B处只允许水平方向的位移,而
35、杆BK上K点虚位移沿铅垂方向,故B 点不动。三角形BEK绕B点旋转_ BE,且:-rE = rD = a -二对刚性杆CD和杆CE由于6rD丄Cd ,6rE丄CE,因此6 rC = 0。由虚位移原理a :W ( FJ二0有:(F1 PJ rDcos 60 0 R rEcos 600 二 0代入各点的虚位移整理可得:下 2R) a“ - 0对任意二-0可得:P = - E1 (受压)1 22 求杆2受力去掉杆2,代之以力p2,系统有一个自由度,选BK与水平方向的夹角二为广义坐标,如上图所示。在不破坏约束的条件下给定一组虚位移,杆AK绕A点转动,因此有 A K,且:rK = 3a =同理可知B点不
36、动,三角形BEK绕B点旋转:丨_ BE,且::rE = a “ : rE 二:d = a =杆AD绕A点转动、:rD _ ad,由刚性杆de上点E的虚位移可确定d点位 移方向如图所示,且:-rD 二:rE = a 匸二同理可知C = 。由虚位移原理x W (Fi 0有:Fj rDcos12O0 P2 rDcos150 P2 rK cos 120 0 = 0代入各点的虚位移整理可得:(F1 2 3P2)二 0对任意二-0可得:P2 = -3Fl (受压)。3 求杆3受力去掉杆3,代之以力P3,系统有一个自由度,选AK与水平方向的夹角二为 广义坐标,如上图所示。在不破坏约束的条件下给定一组虚位移,
37、三角形 ADK 绕A点转动,rD - AD,Tk AK,且::rD 二 a = , : rK 二3a -二同理可知B点不动,.e _ BE,且:、rE =二 rD = a、丁 、rC = 0由虚位移原理x W (Fi 0有:rK cos 120= 0Fj rD cos 60P3 rE cos 150P3代入各点的虚位移整理可得:(F“ - 2 ,3P3) a“ - 0对任意二-0可得:P3=3(受拉)4-12铅垂力F为常力解: F大小和方向不变,常力也是有势力。取 杆和弹簧构成的系统为研究对象。该系统为保 守系统,有一个自由度,选为广义坐标,如图所示。取二0为零势能位置,则系统在 任意位置的势
38、能为:7=7弹 Vf1 2k(b - bcos)2 - F(2b - 2b cos 二) 21二 kb2(1 - cos,)2 -2Fb(1 - cos,) 2由平衡条件dV . 0可得:chbkb(1 - cos 二)- 2F sin - 0有:sin - - 0 和 kb(1 - cos,) - 2F即:H =0和cos日2 F(kb - F )两个平衡位置。 k为判断平衡的稳定性,取势能 V的二阶导数:djV当r - 0时,djV也就是:=(kb - 2 F )b cos)- kb2 cos 2二-2 Fb 0,即y = 0时是不稳定平衡。21d2Vdr由上式可知:1当2F时,kbF (
39、kb -2Fkb稳定平衡位置;2当2Fkb不稳定平衡位置51-4F)且kb时,时,d2VF(kb:F)d2V2 匸 F(kb-F)X/解:取半径为r的半圆柱为研究对象,圆心为 C。半圆柱作纯滚动,有一个自由 度,取两个半圆心连线与 y轴夹角二为广义坐标。作用在半圆柱上的主动力为 重力,系统为保守系统,如图所示,其中 h二竺。由于半圆柱作纯滚动,有:3(1)取坐标原点为零势能位置,则半圆柱在任意位置的势能为:4 r cos( B + 8 )3 二dVV 二 mgz c 二 mg ( R r) cos 丁 -代入(1)式有:4rmg ( R r) coscos(mg (Rr)土sin( RJ ) - sin 二3兀r由平衡条件dVdB=0可得二二0为平衡位置。势能V的二阶导数:d2V由上式可得当Rmg (R )好 cos(R -3兀rr (3 二-1)r , - _ 0 是稳定的。4
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
![《哲学与人生》期中考试附答案[共8页]](/Images/s.gif)