 可穿戴的机器人——外骨骼机器人最新发展
可穿戴的机器人——外骨骼机器人最新发展

《可穿戴的机器人——外骨骼机器人最新发展》由会员分享,可在线阅读,更多相关《可穿戴的机器人——外骨骼机器人最新发展(9页珍藏版)》请在装配图网上搜索。
1、瞋删:炭的哋一也国僚竞相研轨战顷啊人系 仏其中美咏的侦軾排爆啦器,人5。询用汙供竝克和 审淳*汗战场除:了这关机谿人系疑之杠一空踽助士兵 辭倉瘢昨删躺嘶礎 器仪厂一,可穿戴的何为外骨骼机器人“外骨骼机器人.(Exoskeleton Robot)是指套在人体外面的机器人, 也称“可穿戴的机器人.外骨骼本来是指昆虫或甲壳类动 物身体外表的骨骼.具有支撐和保护作 用。很早就有科幻小说提及穿戴在人体 外表、具备动力的特殊装甲,借以提商 人类的战斗力这样的装备即被称作外 骨骼机器人。理想中的外骨骼机器人能 够对使用者提供防护并增强使用者的负 敢和运动能力.最好还可以飞行 在外骨骼机器人研制方面,美国.
2、日本颇见成效。美国的外骨骼机器人计划2000年.美国国防高级研究规划局 发布了外骨骼机器人的研制招标书.包 括以下4方面的要求:结构材料 外骨骼机器人必须使 用坚固、轻型且有弹性的材料.这种材 料必须能够保护穿戴者.以大幅度减少 伤亡.轻巧的能源 外骨骼机器人携带 的能源必须能够维持24小时的工作.而 且必须轻且完全无声$控制与动作外骨骼机器人必须 能够同步跟随使用者的动作,能够加强 使用者的力就并模仿人类的各种动作. 包括战场上的前后左右移动躲闪。目标 是让使用者背负更大质量的同时仍然能 够跑得更快.跳得更高更远液压元件动作必须流畅.商效 且完全无声。美国国防高级研究规划局挑选了几 个方案分
3、头进行.先验证墓本可行性, 再设法改造。前沿視点机器人杨晓红改编自军事家芙国的这份计划全称“外骨骼增 强人类体能表现” (Exoskeleton for Human Performance Augment) 计 划计划启动共有3个单位获选分别进 行外骨骼机器人的初期研制工作:橡树 岭国家实验室(Oak Ridge National Laboratory)、加州大学伯克利分校和 萨克斯(Sarcos)公司.到2005年.萨 克斯公司的全身式夕、件骼机器人脱颖而 出.从2006年起,萨克斯公司开始独挑 大梁研制美国军用夕、骨骼机器人,2007 年,该公司被雷声公司收购。2008年4 月28H,雷声
4、公司宜称萨克斯公司的外 骨骼机器人XOS已呑得显著成功,但仍 住继续改进,关军于2009年开始测试经 过改进的型号。外骨骼机器人研究中最困难的是 在改进之中。XOS的控制原理类似干飞机的线性 传导控制。XOS在经过精心挑选的几个 地方设餐了 44力传感器” 当穿戴者移 动肢体想要做某一动作时,凡是受力的 传感器立即通知中控电脑.然后由电脑 高速计算外背骼应采取何种动作来帮助 使用者。依据计算结果.电脑指示恰当 位置的液压元件移动活塞,活塞拉动缆 线,外骨骼就动起来了.理怨的外骨骼机器人应该能够为穿戴者提供 防护并增强其负重和运动能力.且必须与使 用者的动作同步XOS的控制原理是:以某种方式移
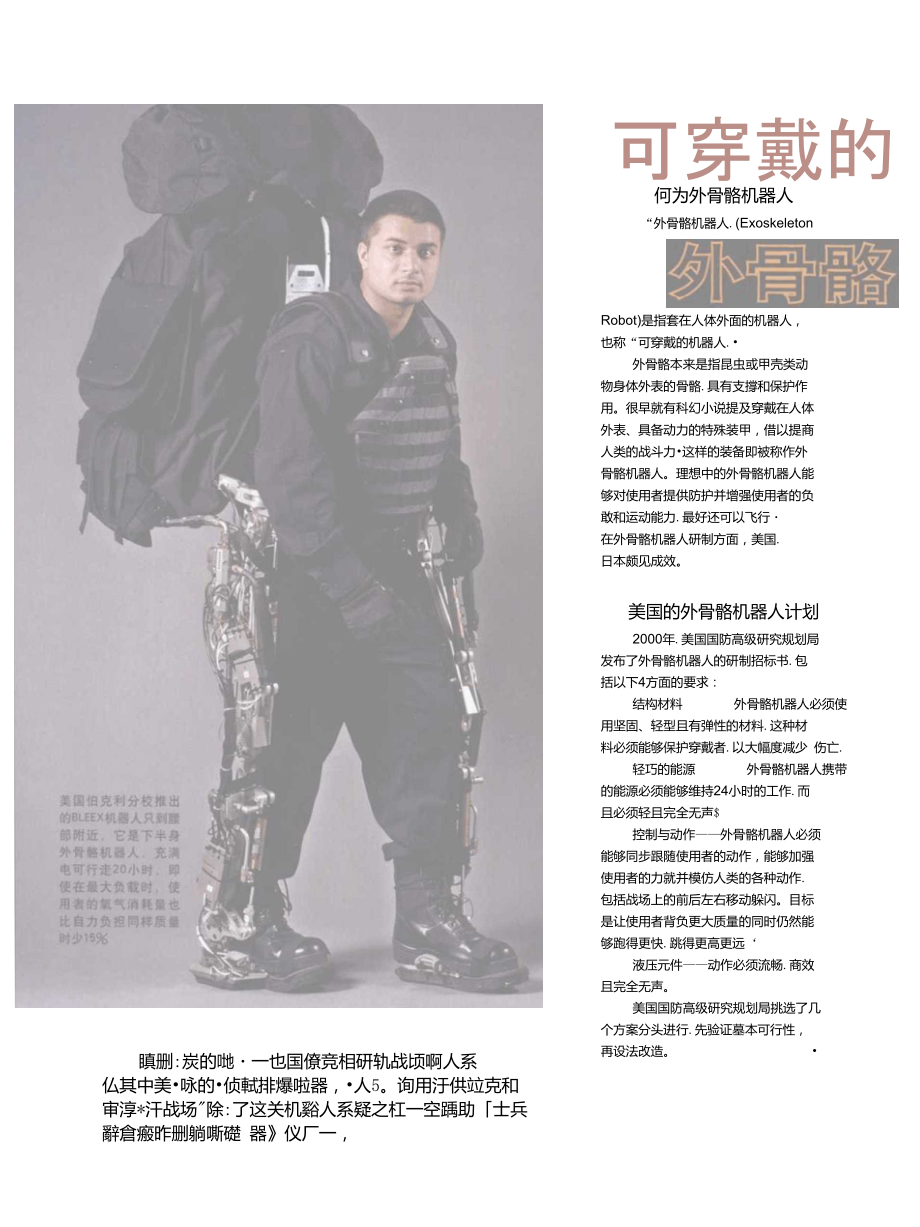
5、动外骨骼,将力传感器所受到的来自人 体的力址减至最小.或者说,因为外骨 骼代替使用者承担负载,所以使用者刚 一开始出力就立即“获得帑助而不总 出力.于是相关位置的传感器就不会继 续受到人体施加的力。XOS的牵头人杰能源间题。在最初研制阶段,伯克利类国萨克斯公司推出的XOS全身装备30个液压元件.每秒必须侦测受力状况数百到数千次不 等.并传输到中控电脑.中控电脑迅速完成运算后立即下达指令到相关的液压元件来完成动作分校采取的是利用人体行走动作充电 的方案.“伯克利下肢末端外丹骼” (BLEEX)机器人只到士兵腰部附近.负载就挂在腰际附近的支架上,最大负 载可达45kg,电源可维持20小时。在戴 大
6、负载时,使用者的氧气消耗量比自力 负担同样质駐要少15%。伯克利分校推 出的第二代BLEEXft零部件微型化方面 很有成效,所冇的电子线路和许多机械 部件都容纳在金属管内。但由干发电装 置影响到行走步态.所以使用者消耗的 能量反而较务萨克斯公司胜出的主要原因是该公 司暂时搁置能源问题先解决全身式外 骨骼的控制.快速反应以及流畅动作等 问題.只要有能源.XOS就可以让使用 者轻松地连续500次举起.放下90kg的 杠铃。鉴干美军的目标是举起180kg的 物品.还有跑.跳等能力,所以XOS仍qbq2009/4下上肢电源襲覽 和角度传惡器电池组生号传悬署地面反作用力传広BI下肢电源賛 和角废传器日本
7、在外骨需机器人 研究方面頗有建树.其主要以商业民用为 主.图为日本HAL-5 机器人主宴部件分布够同步跟随使用者的 动作.能够加强使 用者的力并模仿 人类的各种动f乍 包括战场的前后左 右移动躲闪克布森把这种控制原理叫作“让道”(get out of the way)。这看起来简 单,但具体实施却并不容易.就传感器 而苜,毎秒必须检测受力状况数百到数 千次不等.并传输到中控电脑中控电 脑必须立即完成运算并下达指令到相 关的液压元件完成动作。上述过程如果 不够迅速.使用者就会感到像在水中行 走那样的阻力以及动作明显落后干意 念的不适应感。目前市场上没有适合的液压元件, 因此公司必须自行设计XOS
8、全身所需 的30个液压元件。设计目标是即使使用 者不同,只要穿上XOS就可以使用.无 需人机磨合时间。所以必须解决的问题 是,如果换成体型差异较大的使用者. 传感器如何分辨受到的压力是因为使用 者想要移动或者只是因为较大的身駆在 挤压.传统的液压元件如果在接到指令 后就立即动作,则必须靠耗用能楚来保 持工作流体的充分压力为此.萨克斯 设计了专门的液压阀来降低XOS的能 耗。不仅如此.公司设计团队还打算修 改XOS的电脑程序来更好地模仿人类走 路。人类走路主要依靠臀部的大肌肉抬 腿.在足部接触地面之前.其他许多缓 冲和维持平衡的小肌肉都不出力。按照 这种方式走路,XOS还可以更省电。然 而无论如
9、何.68kg的XOS目前只能依靠 自带电池工作40分钟.长时测试或性能 展示都要依靠外接的液压笛线。美国国防部已经拨款.用于研制军 用人造肌肉纤维目标是利用电压变化 造成上述纤维收缩或者舒张产生力st, 以取代液压元件即使萨克斯公司能够 进一步降低XOS的能経,活动部件较少 的系统还是更为可靠。而且处理电线弯 曲比处理液压管线弯曲更加容易,也没12穿上HAL-5后.穿戴者可以轻 松举起40灼的物体印度MKU公司推世新犁 Instavest防弹衣美国狙击步枪装上i podMl 10狙击步枪圧美国制式狙击步 枪家族中的新成员.干2006年装备部 队.日前美国奈特军械公司在M110 狙击步枪的侧面安
10、装r一台强化过的苹 果播放器(ipod-touch,其内置有Bullcl Fight的外弹道计算软件)。射手只要在 ipod输人天气状况.弹药种类.目标距 禽、凤速等信息,就可以根据计算的结 果对枪械进行校正.编揖/张丽艇安装ipod的 M110狙击步枪qbq 2009/4 T印度MKU公司展出的 新型InstaVest防弹衣2009年阿布扎比国际防务展上.KU公司展出了一款新型Instavest 。该防弹衣的主要特点是克服了敢新组装和穿皴防弹衣需要花费Instavest防弹衣采用全模 计.并配装有快速拉环.只要拉动拉环,防弹 衣就能够在约 30秒的时间內 完成组装和穿 戴而脱下防 弹衣所需的
11、时 间也少,仅为1 秒.这种可迅 速穿脱的待点 使 Instavest 防 弹衣成为士兵有液体渗漏的问题。所以未来主流的 外骨骼机器人或许不会继续采用液压 系统。日本的外骨骼机器人日本在研制机器人方面有很好的基 础,世界上人约一半的工业机器人都出 自日本。日本已经有了外观类似XOS的 全身式商用外骨骼机器人。筑波大学的 山海嘉之教授创立的Cyberdync公司硏 制出混合助力肢体(HAL)外骨骼机 器人。其第五代产品HAL 5在2005年 亮相爱知世界博览会并引起广泛关注, 并被美国时代杂志评为2005年最 佳发明。HAL-5自身质&21kg可以自我 支撑,所以使用者穿上它之后不会感 觉右负担
12、。由挂在腰际的锂电池提供能 源的HAL 5至少可以帮助使用者增加 40kg的抬起或举起能力。完成11AL-5 “人机默契”训练通常需要30分钟。HAL-5有两套控制系统,其中一 套不使用力传感器,而是使用贴附在人 体皮肤上的电极检测微弱的生物电流来 判断使用者想要出力的方戎。另一套控 制系统可以记忆并模仿使用者的动作特 点,例如杲一条槌比较无力.这样可以 更密切地配合使用者,也可以解决某些 人生物电流较弱的I运题。HAL-5干2008年10月开始生产, 年产园500套。但日本目前还没有传出 研制军用外件骼机器人的消息。外骨骼机器人的作战效能以科技发展的现状和趙势而言,比 较先进的国家Z间对抗时
13、,裝甲车之类 的目标可以说是一经发现即被击中,被 击中后或毁或伤。依积远远小于装甲车 的步兵显然比较易于隐蔽.但视野远小 于装甲车,且.人员的弹药携行能力和全 速行进持久力明显落后,如果使用外骨 骼机器人则可以很好地解决这一问题。 美国冃前计划的外骨骼军用机器人姜 求隽有携行质S:为21kg的个人护具 100kg以上的武器及弹药等物品的能 力,自备能源可使冃24小时.持续行军 速度至少毎分钟300m,甚至达到毎分钟 400m以上。外件骼机器人助力的步兵只要有足够的电源.长途行军之后仍然能够很快 地挖掘更多、更深的工事。为了帮助七 兵在阳生环境F准确.快速抵达地点并 了解周围敌我情况.军用外骨骼
14、机器人 将会安装GPS、夜视装备等。更先进的 型号甚至有可能按照指令或自行判断. 将负伤或失去知觉的上兵自行送到友军 后方医护地点。目前正在研究的课题Z 一是.外骨骼机器人允许友军随穿随 用,同时还能阻止敌军利用。如果军用外骨骼机器人技术成 熟,步兵的作战效能将会大幅提升,高 速行军的歩兵将会再度在战场发挥重大 作用。外骨骼机器人的军事后勤与和平用途就地汞之类的救灾而言,如果有了 外骨骼机器人.其作用不言而喻。想像 一下,一个人就能举起100kg甚至WOkg 的石块.混凝土板块,而且24小时连续 工作也不会感到疲劳这样的救灾队伍 町以高出1E常人好几倍的数率在狭小的 空间内清除废墟或者淸除道路
15、上的障碍 物.这将在救灾现场起到怎样的作用! 如果使用行军时速20km.能够在夜间 精确定位、负载100kg以上的外雪骼机 器人,投入-个排就能单次运输4000kg 以卜的物资.且不受天气.缺乏若陆点 等因索影响、込将是怎样的工作效率!如此看来.即使初期成熟的外骨骼 机器人不足以用于战斗,美军也会将其 用于后勤任务.例如槪运和装卸物资、 为战斗机挂弹等可以使用外部能源长时 间工作的任务。 编辑/刘兰芳可穿戴的机器人外骨骼机器人最新发展杨晓红作者: 作者单位:轻兵器刊名:英文刊名: 年,卷(期):SMALL ARMS2009(8)本文读者也读过10条)1. 柯显信.陈玉亮.唐文彬.Ke Xian
16、-xin .Chen Yu-liang .Tang Wen-bin人体下肢外骨骼机器人的发展及关键技术分析期刊论文-机 器人技术与应用2009(6)2. 李向军外骨骼助力机器人研究现状及应用领域展望期刊论文-中小企业管理与科技2009(15)3. 杨智勇.张静.归丽华.张远山.杨秀霞.YANG Zhi-yong. ZHANG Jing GUI Li-hua . ZHANG Yuan-shanYANG Xiu-xia 外骨骼机器人控 制方法综述期刊论文-海军航空工程学院学报2009,24(5)4. 蔡兆云.肖湘江 外骨骼机器人技术研究综述期刊论文-国防科技2007(12)5. 曹恒.孟宪伟.凌正
17、阳.秦颖颀.贺成坤.CAO HengMENG Xianwei LING Zhengyang. QIN Yingqi . HE Chengkun两足外骨骼机器人足底 压力测量系统期刊论文-传感技术学报2010,23(3)6. 刘祚时.庄子宝.LIU Zuo-shi . ZHUANG Zi-bao外骨骼液压伺服系统物理模拟及仿真 期刊论文-煤炭技术2010,29(6)7. 贺琛.张小栋.杨玉涛.HE Chen ZHANG Xiao-dong YANG Yu-tao上肢外骨骼机器人控制系统建模与设计期刊论文-测控技术 2009,28(12)8. 孙建.余永.葛运建.陈峰.沈煌焕.SUN Jian. YU Yong GE Yun-jian . CHEN FengSHEN Huang-huan基于接触力信息的可穿戴型下肢 助力机器人传感系统研究期刊论文-中国科学技术大学学报2008,38(12)9. 曹恒.贺成坤.孟宪伟.凌正阳 下肢外骨骼服传感靴的结构优化分析期刊论文-工程设计学报2010,17(1)10. 王建宇.谢宗武.刘宏.Wang Jian-yu . Xie Zong-wu . Liu Hong外骨骼机器人手指的鲁棒跟踪控制期刊论文-华南理工大学学报(自然科学版)2008,36(10)本文链接:
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
