《三维激光扫描精密测量古建筑大木结构》由会员分享,可在线阅读,更多相关《三维激光扫描精密测量古建筑大木结构(11页珍藏版)》请在装配图网上搜索。
1、Vol. 5, No. 1Dec.2005第5卷第1集2005年12月现代工程测韋技术发展与应用研讨交流会论文集Vol. 5, No. 1Dec.2005第5卷第1集2005年12月现代工程测韋技术发展与应用研讨交流会论文集三维激光扫描精密测量古建筑大木结构王晏民 陈秀忠I,穆雨晴2, 丁延辉-王国利I1北京建筑工程学院测绘工程系,北京,100044:2北京建筑工程学院国际交流学院,北京,100044摘 要为了准确地判断古建筑的大木结构损毁状况,要精确测豐大木结构的整体变形。传统的建筑测 量方法很难满足婴求。我们将三维激光扫描方法成功应用到了古建筑大木结构的精密测駅。在此先介绍三给 激光扫描测
2、ft的基本原理,再介绍利用三维激光扫描方法进行太和殿大木结构精密测故工作,然后讨论应注 意的问题,最后得出-些冇用的结论。1引言中国古建筑绝大部分都用木头作为 框架支撑结构,称之为“大木结构”。古 建筑一般都有几百年甚至几千年的历 史。它们经历长久岁月的沧桑,自然和 人为的破坏,亟待保护。古建筑保护部 门要根据其破损的情况进行不同级别的 修缮。如果破损严厘就需要“落架大修” (将梁架放回地面)。古建筑测绘的一个 重要任务是评价古建筑的破损程度,为 修绪设计提供空间几何依据。传统的古 建筑测量方法很难精确测就大木结构的 整体状况,如柱子的倾斜、梁的倾斜、梁和桁的弯曲度、梁架的整体倾斜和沉降等【1
3、。三维 激光扫描测量具有精度高、速度快、不需要接触被测目标、可构建目标的整体模型等特点2,3。 我们将这一方法成功地应用到了世界上最大的木结构宫殿故宫太和殿的大木结构测駄,为其 修缮设计提供了可靠的空间几何数据。下面先介绍三维激光扫描测量的基本原理,再介绍利 用三维激光扫描方法进行太和殿大木结构精密测量的外业工作和内业工作,然后讨论应注意 的问题,最后得出一些有用的结论。第1集王晏民等:三维激光扫描精密测蚩古建筑大木结构 # 2基本原理Q)(b)(c)(d)图2几种典熨的三维激光扫描仪2.1三维激光 扫描的基本原理三维激光扫描 仪利月激光脉冲发 射器周期地驱动一 激光二极管向物体 发射近红外波
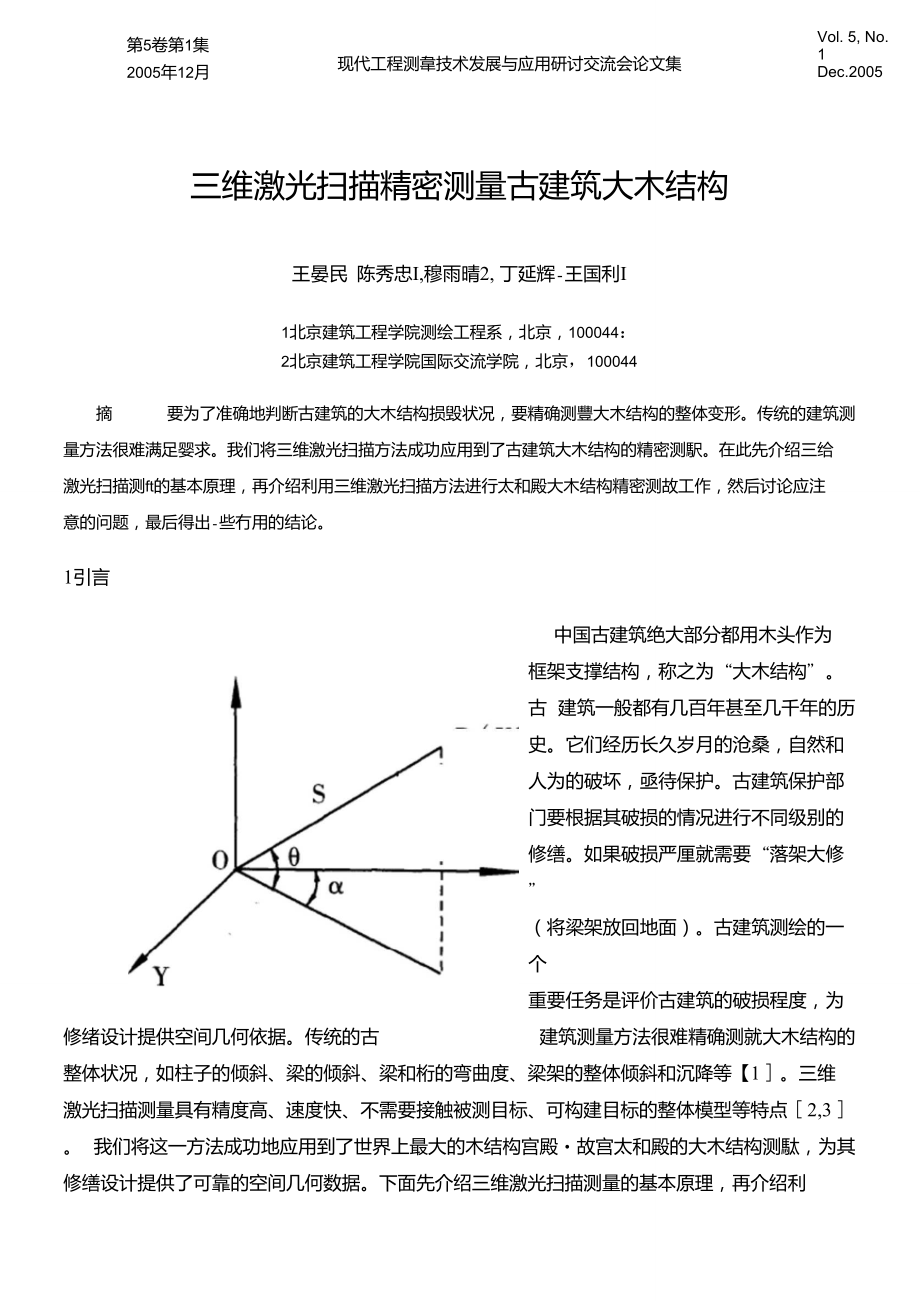
4、长的 激光束,然后由接收 器接收目标表面后 向反射信号,产生一 接收宿号,利用一稳定的石英时钟对发射与接收时间差作计数,光的速度是常量,可测得被 测目标至扫描中心的距离S,精密时钟控制编码器同步测最每个激光脉冲横向扫描角度观测 值a和纵向扫描角度观测值0。激光扫描系统一般使用仪器自己定义的坐标系统:X轴在横 向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直(如图1所示)。内部 伺服马达系统精密控制多面反射棱镜的转动,使脉冲激光束沿X、Y两个方向快速扫描,实现 髙精度的小角度扫描间隔、大范围扫描幅度。通过一个线元素和两个角元素计算空间点位的 X、Y、Z坐标,由(1)式计算空间点三维
5、坐标。(X = Scos&cosa* Y = Scos&sin a三维激光扫描仪有3大类:一类是安置在飞机上的机载型,用于建立高精度DEM;另一 类是安置在地面的站式机,用于小范围的精密三维模型的构建;还有一类是安置在固定平台 上的工业型,用于机械零件的逆向设计与建模。我们所用的是站式机。图2是这次测量所使 用的4种地面三维激光扫描仪。表1是它们的主要技术参数。2.2距离影像与单像点云扫描所得的原始数据是一幅以距离和反射强度为像素属性值的形像,一般称为“距离影 像”,如图3所示。距离影像的扫描间隔是一个小角度的常数,扫描角度可根据点像素的行列 号、扫描间隔以及扫描初始角度按(2)式计算:第1集
6、王晏民等:三维激光扫描精密测蚩古建筑大木结构 299 a- Oq +加 0 = &o +力式中a“叭分别为水平和垂直扫描初始角风”分别为像素的行列号.c为扫描间隔(这衰1几种三维激光扫描仪的主要技术參数图号型号距离范围扫描视场距离精度角度精度速度(a)ILRIS-3D3-1500m40 , 40。7nm at 100b0.00452000 点/s(b)Leica HDS 3000l-100m360 2704mm at 50m0. 005。1800 点/s(c)Leica HDS 45000. 4-25 2m360 3103nml60ppmo.or50万点/s(d)iQsun 8800. 2-4
7、0m360 3203mB+160ppm0.00724万点/s图3距高影像图4点云模型里假定水平和垂直间隔相等)。有了扫描角度和距离,就可用(1)式将距离影像转换成非常密集的离散点构成三维模型, 般称为“点云”,由于是一幅距离影像的点云,可称为单像点云,图4是图3数据转换成的 单像点云。2.3多像点云与目标点云一幅距离影像很难包含整个打描目标,可在不同的位置以不同的角度对同一目标扫描多 輻距离影像。经过坐标转换,将多幅距离彩像统一到同一个坐标系中的过程称作距离影像的 配准(或对齐)。距离影像配之间的配准可称为相对配准。距离影像配准到某一特定的坐标系 可称为绝对配准。将配准后的多幅距离彩像转换成点
8、云,去除垂喪数据,所得的点云可称为 多像点云(或多视点云)。包含整个目标的点云可称为目标点云。目标点云一般都是多像点云, 但也有单像目标点云的情况,例如平面目标的点云就可能是单像点云。2.4 剖面图制作图5太和JK大木结构的构成和变形情况都可用剖面图的 形式表达出来。利用点云制作剖面图的方法有三 种:一种是直接剖点云形成点云断面,再用线拟合 的方法构成剖面图;另一种是先用点云生成不规则 三角网,再剖三角网,三角网与剖切平面的交线构 成剖面图:还有一种是先用点云建立三维实体模 型,再剖实体模型构成剖面图。如果点云数据完整,则三种方法的精度是一样的。我们在太和殿的测量中采用了第一种方法。3太和殿大
9、木结构测量太和殿的外形如图5所示。它是目前世界 上最大的木结构宫殿,长60多米,宽30多米, 高20多米,分上下两层,上层是梁架,下层是 大殿和暧阁。故宫提出的要求是测量结果都统一 到建筑坐标系,Z轴是一条铅垂线,测量误差 lcm,测竜结果用剖面图表示。为了满足这些要 求,我们进行了下面的工作.3.1控制测量控制网的布设如图6所示,在大殿外面布设了 5个点,在大殿布设了 4个点。Q13和Q14匕&中V4(b)illB14用全站仪按二等导线网的要求 测量,最大坐标闭合差为3mm。用竖井水准测量的方法传 递高程到梁架上。平面坐标的传 递方法如图7(a)所示,先拿去 Q 13和Q 14处的天花板,在
10、 Q 13和Q 14处同时架全站仪 和反光镜,垂球用长线吊到地 面,在垂球位置做标记Q13和 Q14。在地面,T13和T14是已号点用于传递三维坐标到梁架上面。采髙程用精密水准测量,最大闭合差为2mm。平面坐标第1集王晏民等:三维激光扫描精密测蜀古建筑大木结构301图8像控点知点,如图7(b)所示构成附合导线。在梁架上,Q 13和Q 14成了已知点,如图7(c)所示 构成附合导线。3.2标靶和像控点测量大殿外用Leica HDS3000脉冲扫描仪,布设如图8)所示的专用标靶作为像控点,大殿 的四面每面布设至少布设4个像控点。大殿内用1QSUN880和LeicaHDS4500两种相位式扫描 仪。
11、没有布设专用标耙,选择特征点作为绝对配准的像控点。梁架上选取桐柱标注字的特征 点作为像控点如图8 (b)所示。地面选取金砖角作为像控点如图8(c)所示。室内每一间上下 均布设4个像控点。像控点用无反射棱镜全站仪前方交会测就得到三维坐标。坐标闭合差 5mm。3.3扫描扫描点的间隔控制在平均5mm。扫描站点的布设是梁架上面每间布设5个站,计45站。 殿内地面每间布设4个站,计44站。败外4面每一面布设3个站,计12站。整个太和殿总 计扫描了 111站。一站的距离彩像数据约70MB,转换成点云约300MB. 一站扫描的距离影像 如图3所示。3.4直接测最有些地方扫描激光点不能到达,必须采用直接测就
12、的方法加以补充。例如房梁的上平面扫描激光很难到达, 如不直接量取梁的厚度,就不能确定梁的形状和大小。3.5点云模型构建点云模型的过程实际上就是配准的过程。由干 数据毘太大,我们采取了分区构建点云模型的策略.梁 架上和地面分别构建,殿内和殿外分别构建。殿内每一 间构建一个点云模型(梁架上9个,地面11个),殿外4 面每一面构建一个点云模型(殿外4个)。总计构建了 24 个点云模型。每个模型的坐标系都统一到地面建筑坐标 系。殿外配准直接用标杷进行,配准精度很高,在4nun 以内。殿内由于没有标靶,配准用特征面+点云的方法进 行,配准精度控制在lcm以内。图9中)是一间梁架的 点云模型,(b)是殿内
13、地面一间的点云模型,(c)是大殿 正面的点云模型。303现代工程测量技术发展与应用研讨交流会论文集第5卷#现代工程测量技术发展与应用研讨交流会论文集第5卷3.6 剖面图剖面图东西方向分别在桐柱中心位置和屋脊的位 置剖切,一共有3幅东西向剖面图。南北方向在每排柱 子的中央位置剖切,一共有12幅南北向剖面图。制作 剖面图的方法实先将剖面位置的点云模型提取出来,再 剖切点云得到如图10(a)所示的剖面点云,然后采用线 跟踪拟合的方法绘出如图10(b)所示的剖面图。图10(c)()是东西向桐柱位置的剖面图。4讨论4.1扫描距离使用相位式扫描仪时,扫描点的精度随着距离的增 加降低较快,所以配准时要考虑选
14、择扫描距离大致相等 的点线面作为配准特征,且扫描距离要满足精度要求, 例如,要求配准精度为5mm,则配准特征的扫描距离应 小于10m。标靶也 要满足这些要求。4.2标靶 从实际结果 看出,基于特征的 配准精度比基于标耙的配准精度低得多。其原因主要是图9点云橫型特征不规则,如平面不平,圆柱不圆等。如果要求精度 较商,则应采用标覽来进行配准。4.3实体模型实际上最好是用实体模型来表示大木结构。由于大 木结构有变形,不能用规则的构件来表示大木结构,应 该用自由曲面来表示各个构件的几何形状。我们正在研究如何用自由曲面来构建大木结构的实体模型。5结束语(b)我们成功地将三维激光扫描技术应用到了大型古建图
15、 io第1集壬晏民等:三维激光打描精密测就古建筑大木结构305筑的梢密测量中,其帮度优于lcnu该方法的优点A.糟度髙、整体性强、速度快、不需要搭 建脚手架。如果该方法得以推广,将大大促进占代建筑的保护工作。下一步的工作是构建人 木结构的实体模型和构建整个占建筑的仿真模型。参考文献1 林源.古建筑测绘学.北京:中国建筑出版社,2003.2 王晏民.逆向工程与测重工程.中国测绘学会工程测量分会年会论文集,2004.31王霄,刘会霞,梁佳洪.逆向工程技术及其应用.北京:化学工业出版社,2004.4 Berntsen International Inc. 2004 3D Laser Scanner Hardware Survey, www. poponline. com, 2004
 三维激光扫描精密测量古建筑大木结构
三维激光扫描精密测量古建筑大木结构