 完整word版,ELMO驱动器调试方法
完整word版,ELMO驱动器调试方法

《完整word版,ELMO驱动器调试方法》由会员分享,可在线阅读,更多相关《完整word版,ELMO驱动器调试方法(17页珍藏版)》请在装配图网上搜索。
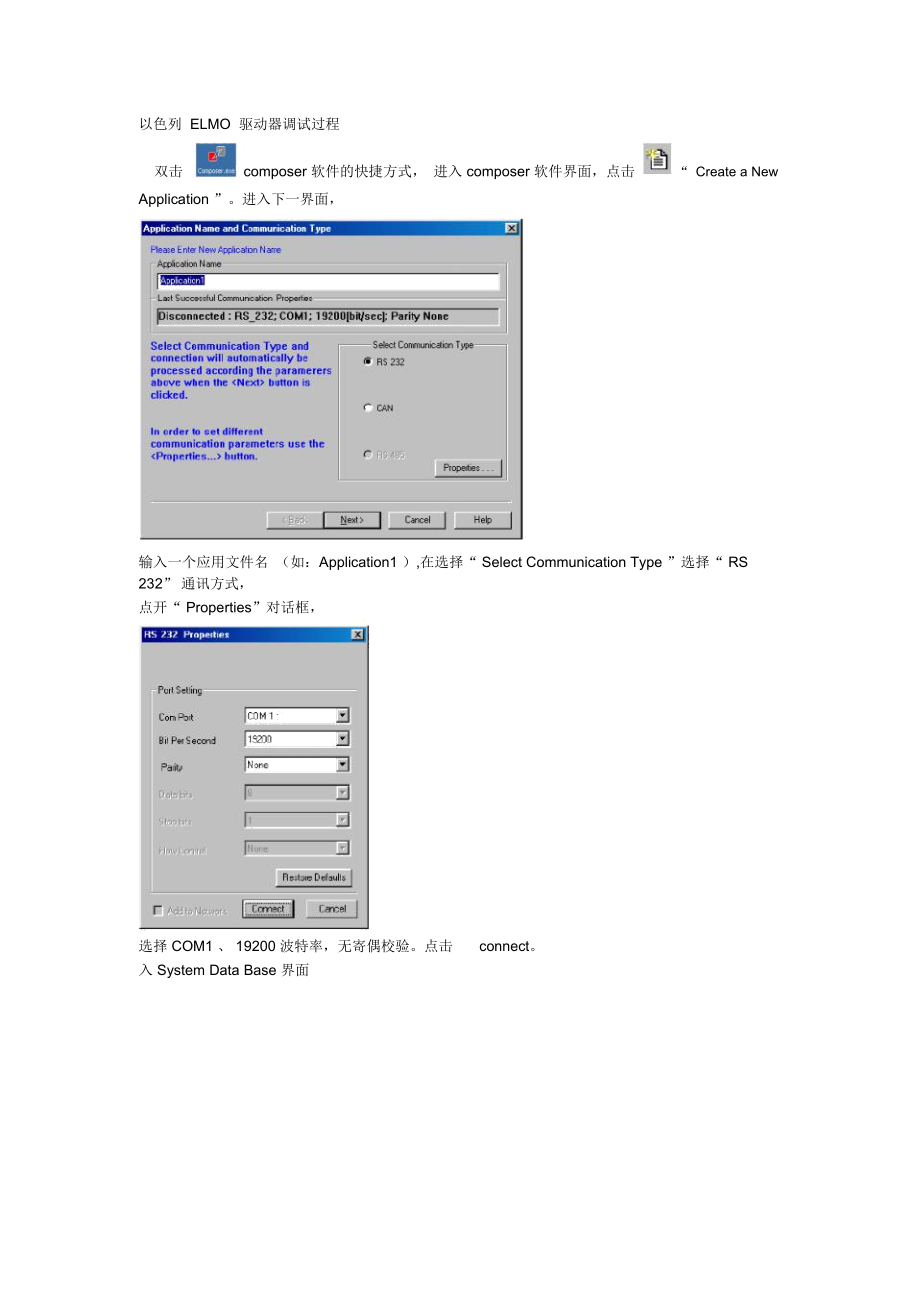
1、以色列 ELMO 驱动器调试过程双击composer 软件的快捷方式, 进入 composer 软件界面,点击“ Create a NewApplication ”。进入下一界面,输入一个应用文件名 (如:Application1 ),在选择“ Select Communication Type ”选择“ RS 232” 通讯方式,点开“ Properties”对话框,选择 COM1 、 19200 波特率,无寄偶校验。点击connect。入 System Data Base 界面在“Motor Manufa cturer Name ”选择电机的制造厂商,在“Motor P/N”对话框里选择相
2、应型号的电机, 接着选择 “ Motor type”,如果没有该电机的制造厂商,则选择 “ My Motor然后再“ Continuous Stall Current:”填写电机的最大的持续堵转电流(单位:A )仔“ Maximum Mechanical Speed:”填写电机的最大的电机转速。”,填写好了之后点击“Next ”进入“ Communitation Feedback Parameters ”界面在“ Current Main Commutation Feedback ”选择编码器类型:如果是增量式编码器,就选择Encoder在“ Encoder Resolution ”静态对话框
3、下的“Pulses per Revolution ”填写编码器的分辨率。点击“ Next”进入“ Defining System Limits”单元。在“ Driver Parameters”块中填写入下参数“Application Continuous Current:”在这一项填写该电机的额定电流“Application Peak Current:” 在这一项填写该电机的峰值电流在“ Application Mechanical Limits”块中填写入下参数“Speed ”在这一项填写电机 的额定转数点击“ Next”进入“ Logic I/O ”界面:这个对话框允许你可以定义各种输入/
4、 输出信号发生的操作,在这个对话框里,可以选择相关的功能和逻辑电平。对于输入:性能描述Inhibit (Freewheel)关闭驱动器,电机自由运行Hard Stop硬件控制电机停止Ignore忽略,输入不可用,没有指定的功能General Purpose激活向光一般的功能Forward Only仅仅允许正方向旋转Reverse Only仅仅允许反方向旋转Begin电机开始操作Soft Stop软件控制停止Soft and Hard Stop软件和硬件控制停止Home主要选项被激活(仅Input 5可用)AUX Home辅助选项被激活(仅Input 6可用)对入输出:性能描述AOK驱动器准备使
5、用Brake刹车使用中General purpose输出不可用一般情况下, 我们都把 Input 和 Output 设置为不可用。 设置完了之后, 点击“ Next ”进入“ Custom ” 对话框:说明:STEP1: Tuning the Current Loop电流环调试(这是自动的)STEP2: Establishing Commutation整流(设置电流的参数,也是自动)STEP3: Tuning the Velocity Loop速度换调试STEP4: Tuning the Position Loop位置环调试STEP5: Skip Tuningdual Loop双环调试点击“
6、Next ” 按钮进入电流环调试,直接点击“run ”按钮即可,系统进入电流环调试状态。Step 1: 电流环调试等待运行完毕,会弹出如下对话框点击“ Yes”,然后点击“Next ”按钮,进入整流调试。Step 2: 整流调试 ()也是点击“ run ”等待弹出如下对话框点“ OK ”等待弹出如下对话框点击“ Yes”去接受系统定义的正方向,点击“No ”将系统定义的正方向改为反方向。等待弹出如下对话框:点击“Yes”进入下一步,注:如果整流失败,可能是电机编码线接错或者没有接到驱动器的“Main feedback”.2.可能是电机的峰值电流( peek current)或者持续电流 ( c
7、ontinue current)设置小了。3.系统得转动惯量太大,电机的输出扭矩小等原因。当整流环调试完了之后进入速度环调试。Step 3: 速度环调试速度环界面如下在“ Select the Tuning Type”有三种调试方式:1Manual tuning,手动对速度环每一个必要的参数进行调试。2 . Automatic tuning,自动对速度环的参数调整3.Advanced manual tuning,建立或者修改速度环参数表。对于一个良好的系统而言,必须手动的对电机的参数进行调试;也就是先调试Manualtuning,然后再用点击 WIZARD进行 Advanced manual
8、tuning调试。用 Manual tuning,调试速度环(Velocity loop Tuning)1, 在“ Select the Tuning Type”选择“ Manual tuning”2, 将KI 清零 。3, 在“ Select Test Parameter ”下将“ -Displacement”改为 -1000;将“ +Displacement改为1000。将“ Velocity ”改为 10000count/second(这个数值越小越好,只要电机能响应,那么系统的效果就越好) ,4, 点击“ Advance Filter”的“ designer ” ,将所用滤波器去掉(D
9、elete 或者 Not used )”.5, 如果“ Profiler mode”打了,那么就把它去掉。6, 将KP 值设为 2 ,点击“ run ”直到记录的SCOPE 里显示 velocity 波形过冲了 20%25% ,然后将游标移到速度曲线的两边,点击“ Analyze ”下的“ statistics ”,点击该对话框的下的“ Vector ”的“ Velocity ”,那么 Velocity Maximum就是该 Maximum值;同样点击“ Vector ”的“ Velocity command” ,那么 Velocity command Maximum的值就是该Maximum
10、值(判断是否过冲了 20%25% ,即 Velocity Maximum/Velocitycommand Maximum =1.21.25 )。(其中黄色的曲线是 Velocity command, 而红色的曲线是 Velocity )如果没有过冲,将当前 KP 值乘以 2,继续反复操作这一步。直到过冲了20%25%.7.如果系统有共振例如如下的电流波形。对Current 的波形(电流波形)进行傅立叶分析,具体操作如下:1) 放大电流波形,移动游标到电流曲线的两边,点击“Analyze ”菜单下的“FFT”在“ vectors ”下点击“ currentA” ,点击“ OK ”按钮。则弹出如下
11、:将状态栏中的X=868.0556 即为系统得共振的共振点,关闭Scope.dav 。回到“ Tuning VelocityLoop ”界面,打开“ Advace filter ”选中“ NOTCH ” ,点击“ ADD ”按钮,在“ Notch ”下填入X 值。点击“ Apply ”按钮 ,点击“ OK ”按钮,在点击运行“run ”会发现共振没有了,8继续调试参数KP ,重复步骤 6,直到 Velocity 过冲了 2025% 。如还有共振,重复步骤7 。9. 当要加合适的“ Double pole ”的方法。1)把原来加的“ Double pole ”去掉。2). 运行3) . 对电流的
12、曲线进行 FFT 分析,首先将 Master 游标移到电机起动后正运行的起点的电流波形,将 Slave 游标放到最右边,如图所示。4)点击 “ Analyze ”菜单下的 “ FFT ” 在“ vectors ”下点击“ currentA ”,点击“ OK ” 按钮。得到电流波形如图所示。5) .静态对话框的 X值就“ Double pole ”的值。那么在 Advance Filter 里加入 “ Double pole ”,填入改就可以了。10. 当过冲到了2025% 之间,将当前的KP 值降低至当前值的0.75 ,(公式为: KP= K P 0.75 )然后运行。放大波形显示,将Mast
13、er 游标移至 Velocity 曲线的上升的零点,将Slave 游标移到Velocity 刚好到达间 t ),将当前的Velocity CommandKP 值除以上升时间的位置。读取静态对话框中t 的商即为 KI ,公式如下:x值(该x 的值即为上升时KPKI=t填写 KI,运行,得到如图所示的波形关闭 SCOPE.dav ,回到 composer ,点击“ Next ”,进入位置环调试。Step4: 位置环调试用 Manual tuning,调试位置环(Position loop Tuning)将速度环的 KI 降低至该 KI 值得 0.7,为位置的环的 KP 留出空间。位置环的 KP 等
14、于 0.5除以速度环的上升时间 t 的商 .公式如下:0.5位置环KP =t如果“ Profiler mode”打了,那么就把它去掉。运行。等到波形如下:点击“ Next ”或者“完成”存盘。哈哈 ! 恭喜你,你已經學會了Manualtuning下面,我来说说如何用先通过 manual tuningAdvance manual tuning调试 ELMO调试完了之后,进入Smart terminal伺服系统。界面。在选项里面选择“Velocity Mode”,然后在项选择 RPM(我们习惯于用转/ 分的单位内),填入相应转数,点击工具条上的按钮,再点击,开始运行。(特别是低速运行,看有无杂音,
15、有无爬行,如果有上述一样就需要时使用Advance manual tuning)要进行Advance manual tuning调试,点击“ Wizard”按钮,进入System Data Base 界面。在“Motor Manufacturer Name ” 选择电机的制造厂商,在“ Motor P/N ”对话框里选择相应型号的电机, 接着选择 “ Motor type ”,如果没有该电机的制造厂商, 则选择 “ My Motor 然后再“ Continuous Stall Current :”填写电机的最大的持续堵转电流(单位: A )仔“ Maximum Mechanical Speed
16、 :”填写电机的最大的电机转速。”,填写好了之后点击“Next ”进入“ Communitation Feedback Parameters ”界面在“ Current Main Commutation Feedback ”选择编码器类型:如果是增量式编码器,就选择Encoder在“ Encoder Resolution ”静态对话框下的“Pulses per Revolution ”填写编码器的分辨率。点击“ Next”进入“ Defining System Limits”单元。在“ Driver Parameters”块中填写入下参数“Application Continuous Curr
17、ent:”在这一项填写该电机的额定电流“Application Peak Current:” 在这一项填写该电机的峰值电流在“ Application Mechanical Limits”块中填写入下参数“Speed ”在这一项填写电机 的额定转数点击“ Next”进入“ Logic I/O ”界面:设置完了之后,点击“Next ”进入“ Custom ”对话框:点击“ Next ” 按钮进入电流环调试,直接点击“run ”按钮即可,系统进入电流环调试状态。Step 1: 电流环调试等待运行完毕,会弹出如下对话框点击“ Yes”,然后点击“Next ”按钮,进入整流调试。Step 2: 整流调
18、试 ()也是点击“ run ”等待弹出如下对话框点“ OK ”等待弹出如下对话框点击“ Yes”去接受系统定义的正方向,点击“No ”将系统定义的正方向改为方向。等待弹出如下对话框:点击“ Yes”进入下一步,Step 3: 速度环调试速度环界面如下在“ Select the Tuning Type”选择“ Advanced manual tuning”,弹出如下对话框:设置 +Displacement为 1000, -Displacement to -1000 。 不要选中 Gain Scheduling 和Profiler Mode ,如果该项打上了,就去掉。把“ manual tunin
19、g”调试下的速度环的KP 和 KI 值分别填入到 “ Velocity ”为 10763count/sec这一项的 Velocity loop KP和 Velocityloop KI 然后对这项 Accept ( 即打上 ) ,在点击按钮。第一步: 将Velocity 10763count/sec的 KP 值乘以 3的积(不要修改这个转数的 KP 值),找出与该积最接近的Velocity ,将该 Velocity 的 KP 的减半,将该 Velocity 的 KI 值降至 25%,然后对这项 Accept (即打上 ) ,在点击按钮。第二步:将上一步修改的Velocity 的 KP 值乘以 3
20、(不要修改这个转数的 KP 值),找出与该积最接近的 Velocity,将该 Velocity 的 KP 的减半,将该 Velocity 的 KI 值降至 25%,然后对这项Accept ( 即打上 ) ,在点击按钮。第三步:将上一步修改的Velocity 的 KP 值乘以 3(不要修改这个转数的 KP 值),找出与该积最接近的 Velocity,将该 Velocity 的 KP 的减半,将该 Velocity 的 KI 值降至 25%,然后对这项Accept (即打上) ,在点击按钮。注:你也可以对每一种转速进行调试(只要该转速下电机能响应),能这样调试效果最好,他的调试方法跟“manual tuning”调试 KP 和 KI 的方法是一样的。这里就不重复了。系统用速度环的就调试速度环,系统用位置环就调试位置环 ,如果系统用的位置环,就把位置环( Position loop )的 KP 和 KI 同速度环的调试方法一样修改。然后点击“ NEXT ”按钮进入下一步,存盘就可以了。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
