《用DIS研究机械能守恒定律(步骤 及习题)》由会员分享,可在线阅读,更多相关《用DIS研究机械能守恒定律(步骤 及习题)(4页珍藏版)》请在装配图网上搜索。
1、 实验 用DIS研究机械能守恒定律1、 实验报告 (一)实验目的:研究动能和重力势能转化中所遵循的规律。 (二) 实验原理:将实验装置中的光电门传感器接入数据采集器,测定摆锤在某一位置的瞬时速度,从而求得摆锤在该位置的动能,同时输入摆锤的高度,求得摆锤在该位置的重力势能,进而研究势能和动能转化时的规律。(三) 实验器材:机械能守恒实验器、DIS(光电门传感器、数据采集器、计算机等)(四) 实验步骤:1、实验1(1)卸下定位挡片,将摆锤置于A点释放后,观察它摆到左边最高点的位置,并记下该位置,观察是否A点与等高。(2)装上定位挡片于P点,再将摆锤置于A点释放后,观察它摆到左边最高点的位置,并记下
2、该位置。(3)将定位挡片依次放在Q、R点,重复实验步骤(2)观察、记录。(4)写出实验结论: 2、实验2(1)连接DIS实验系统。(2)测量摆锤的直径及其质量并且输入软件界面内。(3)将光电门分别放在B、C、D点,每次摆锤在A点释放,点击“数据计算”,系统会自动显示B、C、D各点的重力势能、动能和机械能。(4)比较A、B、C、D各点的机械能数值,得出结论。(五) 实验记录:次数 D C B A高度h/m0.0000.0500.1000.150速度v/ms-1势能Ep/J动能Ek/J机械能E/J(六) 实验结论:写出机械能守恒定律: (七) 实验误差分析: 2、 实验注意事项1实验中A、B、C、
3、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认,不必输入2摆锤每次均从A点无初速释放,A点位置不能移动。3光电门传感器定位的顺序是D、C、B,不能颠倒,且光电门传感器定位要正确。4摆线不易伸长的线,如单根尼龙丝、胡琴丝或蜡线。且摆锤在A点静止时摆线不能松驰三、误差分析1空气阻力使摆锤的机械能有所减少2A、B、C、D四点定位有误差,使高度的值有误差,引起测得的重力势能有误差3摆线在D、C、B位置均有不同程度的伸长量四、参考习题 1、用DIS研究机械能守恒定律的实验中:(1)(多选题)下列说法中正确的是:( ) BC(A)摆锤每次都必须从摆锤释放器的位置以不同的
4、速度向下运动(B)必须测定摆锤的直径(C)摆锤下落的高度可由标尺盘直接测定(D)定位挡片的作用是改变摆锤的机械能(2)某同学实验得到的数据界面如图2所示,在数据要求不太高的情况下,可得出结论: 只有重力做功的情况下,物体的机械能保持守恒理由是: (计算出摆锤在A、B、C、D四点的机械能分别为1.12510-2J、1.1110-2J、1.0810-2J、1.0510-2J,各点机械能大小基本一致)(3)经过仔细研究数据发现,摆锤从A到D的过程中机械能 ,造成这种情况的原因主要是 (逐渐减小,摆锤克服空气阻力做功消耗一定的机械能) 2将实验装置中的光电门传感器接入数据采集器,测定摆锤在某一位置的瞬
5、时速度,从而求得摆锤在该位置的动能,同时输入摆锤的高度,求得摆锤在该位置的重力势能,进而研究势能和动能转化时的规律。实验中A、B、C、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认,不必输入。现某位同学要测定摆锤在D点的瞬时速度。其实验装置如图(1)所示,接着他点击“开始记录”,同时让摆锤从图中所示位置释放,计算机将摆锤通过光电门传感器的速度自动记录在表格的对应处,如图(2)。请指出该同学实验中的错误之处: 摆图(2)中计算机记录的数据与真实值相比将(填“偏大”、“偏小”或“仍准确”) 答案:光电门传感器未放在标尺盘最低端的D点;摆锤释放器未置于A点偏小3、某同学用DIS研究“机械能守恒定律”的装置如图(a)所示,在一次实验中,选择DIS以图象方式显示实验的结果,所显示的图象如图(b)所示图象的横轴表示小球距D点的高度h,纵轴表示摆球的重力势能Ep、动能Ek或机械能E试回答下列问题:图(b)的图象中,表示小球的重力势能Ep、动能Ek、机械能E随小球距D点的高度h变化关系的图线分别是 (按顺序填写相应图线所对应的文字) 根据图(b)所示的实验图象,可以得出的结论 ( 乙、丙、甲;在实验误差允许的范围内,在只有重力做功的情况下,小球的机械能守恒) (注:文档可能无法思考全面,请浏览后下载,供参考。可复制、编制,期待你的好评与关注!)
 用DIS研究机械能守恒定律(步骤 及习题)
用DIS研究机械能守恒定律(步骤 及习题)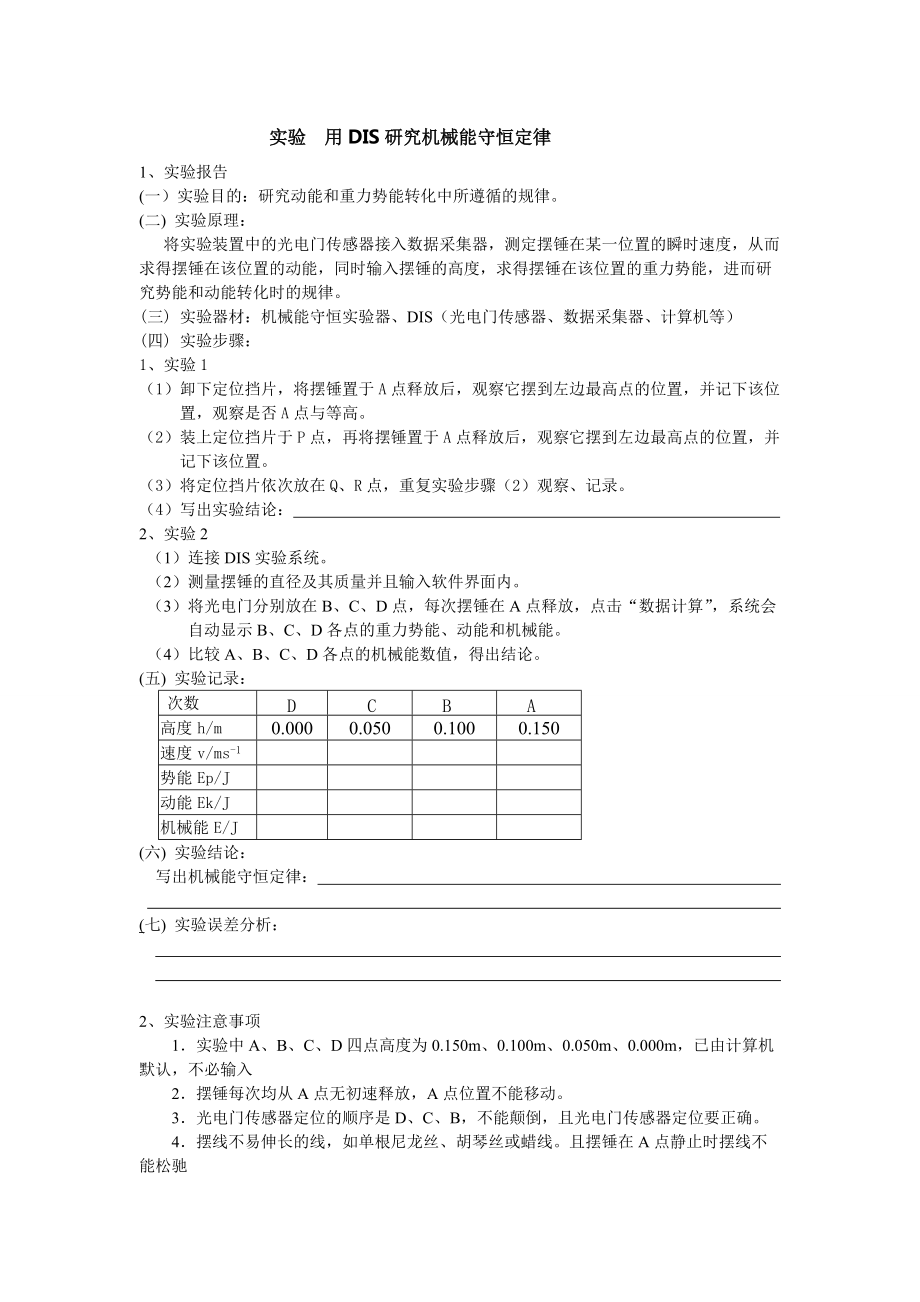

![《学会生存》读后感[共4页]](/Images/s.gif)