 优化设计复习资料有答案(共37页)
优化设计复习资料有答案(共37页)

《优化设计复习资料有答案(共37页)》由会员分享,可在线阅读,更多相关《优化设计复习资料有答案(共37页)(37页珍藏版)》请在装配图网上搜索。
1、精选优质文档-倾情为你奉上现代设计方法参考书目:1、陈继平. 现代设计方法, 华中科技大学出版社。2、高健. 机械设计优化基础, 科学出版社,2007,93、刘惟信. 机械最优化设计,第二版,清华大学出版社。第一章习题例2 某工厂生产甲乙两种产品。生产每种产品所需的材料、工时、电力和可获得的利润,以及能够提供的材料、工时和电力见表。试确定两种产品每天的产量,以使每天可能获得的利润最大。设每天生产甲产品x1件,乙x2件,利润为f(x1,x2) f(x1,x2)=60x1+120x2每天实际消耗的材料、工时和电力分别用函数g1(x1,x2)、g2(x1,x2)、g3(x1,x2)表示: g1(x1
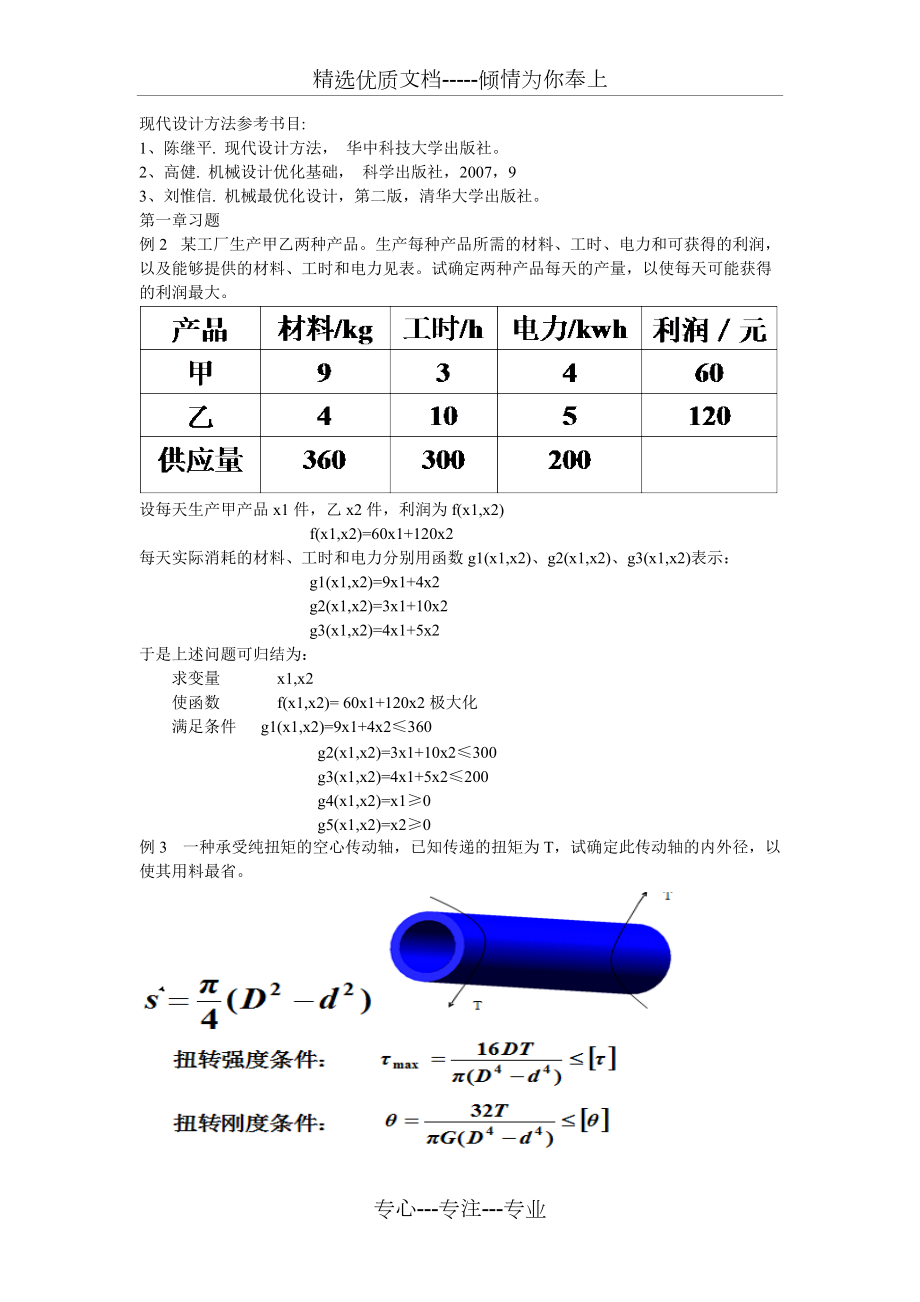
2、,x2)=9x1+4x2 g2(x1,x2)=3x1+10x2 g3(x1,x2)=4x1+5x2于是上述问题可归结为: 求变量 x1,x2 使函数 f(x1,x2)= 60x1+120x2极大化 满足条件 g1(x1,x2)=9x1+4x2360 g2(x1,x2)=3x1+10x2300 g3(x1,x2)=4x1+5x2200 g4(x1,x2)=x10 g5(x1,x2)=x20例3 一种承受纯扭矩的空心传动轴,已知传递的扭矩为T,试确定此传动轴的内外径,以使其用料最省。例: 求下列非线性规划优化问题优化设计的迭代算法1、下降迭代算法的基本格式迭代公式基本原理:从某一初始设计开始,沿某
3、个搜索方向以适当步长得到新的可行的设计,如此反复迭代,直到满足设计要求,迭代终止。S(k)第k步的搜索方向,是一个向量;k第k步的步长因子,是一个数,它决定在方向S(k)上所取的步长大小。简单的说:是一个搜索、迭代、逼近的过程。最关键的是搜索的方向和步长。迭代算法的基本步骤:1,选定初始点X(0),令k=0;2、 在X(k)处选定下降方向S(k);,3、从X(k)出发沿S(k)一维搜索,找到X(k+1)=X(k)+kS(k), 使得f(X(k+1)0,则称矩阵H是正定的;(2)若有XTHX0,则称矩阵H是半正定的;(3)若有XTHXf2, 则h=2h=2 x3=x0+h=2 f3=f(x3)=
4、18 f2f3, 则 a b=0,2 1、 函数F(X)为在区间10,20内有极小值的单峰函数,进行一维搜索时,取两点13和16,若F(13)F1。在下次搜索区间中,应作如下符号置换( ) a1a b1a1 F2F1 aa1 a1b1 F1F2 bb1 b1a1 F2F1 b1b a1b1 F1F2 3、 例 :用黄金分割法求函数f(x)=3x3-4x+2的极小点,给定 x0=0, h=1, =0.2。解:1)确定初始区间x1=x0=0, f1=f(x1)=2x2=x0+h=0+1=1, f2=f(x2)=1 由于f1f2, 应在原方向继续向前探测x3= x2+h=1+1=2, f3=f(x3
5、)=18由于f2f3,可知初始区间已经找到,即a,b=x1,x2=0,22)用黄金分割法缩小区间 第一次缩小区间: x1=0+0.382X(2-0)=0.764, f1=0.282 x2=0+0.618 X(2-0)=1.236, f2=2.72 f10.2第二次缩小区间:令 x2=x1=0.764, f2=f1=0.282 x1=0+0.382X(1.236-0)=0.472, f1=0.317由于f1f2, 故新区间a,b=x1,b=0.472, 1.236因为 b-a=1.236-0.472=0.7640.2, 应继续缩小区间。第三次缩小区间:令 x1=x2=0.764, f1=f2=0
6、.282 x2=0.472+0.618X(1.236-0.472)=0.944, f2=0.747由于f10.2, 应继续缩小区间第四次缩小区间:令 x2=x1=0.764, f2=f1=0.282 x1=0.472+0.382X(0.944-0.472)=0.652, f1=0.223由于f10.2, 应继续缩小区间。第五次缩小区间:令 x2=x1=0.652, f2=f1=0.223 x1=0.472+0.382X(0.764-0.472)=0.584, f1=0.262由于f1f2, 故新区间a,b=x1,b=0.584, 0.764因为 b-a=0.764-0.584=0.180,且F
7、(X4)F(X2),那么为求F(X)的极小值,X4点在下一次搜索区间内将作为( )。 AX1 B. X2 C. X3 D. X4 例 : 用二次插值法求函数f(x)=3x3-4x+2的极小点,给定 x0=0, =0.2。解 1)确定初始区间初始区间a,b=0,2, 中间点x2=1。 2)用二次插值法逼近极小点相邻三点的函数值: x1=0, x2=1, x3=2; f1=2, f2=1, f3=18. 代入公式:xp*0.555, fp=0.292由于fpf2, xp * 0.2, 应继续迭代。在新区间,相邻三点的函数值: x1=0, x2=0.555, x3=1; f1=2, f2=0.292
8、, f3=1.xp*0.607, fp=0.243 由于fpx2, 新区间a,b=x2, b=0.555,1 |x2-xp * |=|0.555-0.607|=0.052O,则二次刑矩阵M是( )a三角矩阵 B.负定矩阵 C.正定矩阵 D. 非对称矩阵 E. 对称矩阵4、 求minf(X)=x12+x22-x1x2 s.t. h(X)=x1+x2-1=0 的极小值。第五章1、 在复合形法中,若反射系数已被减缩到小于一个预先给定的正数,仍不能使反射点可行或优于坏点,则可用( )A 好点代替坏点 B 反射点代替坏点C 次坏点代替坏点 D 形心点代替坏点2、对于目标函数F(X)受约束于gu(X)0(
9、u=1,2,m)的最优化设计问题,外点法惩罚函数的表达式为( )计算题:1、在用复合形法求解约束优化问题:时,选定的初始复合形的顶点为: X1=0.25, 0.5T, X2=0, 1T X3=1, 0T, X4=0.48, 0.55T问优化迭代计算后得到的新复合形的顶点?第六章作业:教材P973.4,3.6第九章1、平面应力问题中(Z轴垂直于该平面),诸应力分量中为零的是( )。A x,y,z B xy,xz,yz C x,y,xy D z,yz,xz 2、在平面应力问题中,沿板厚方向( )。A 应变为零,但应力不为零 B 应力为零,但应变不为零C 应力、应变都为零 D 应变、应力都不为零3、
10、 从作图的结构体中取出单元体进行应力状态分析,正确的是( )A. x=y=0,xy0B. xy=yz=0,x=y0C. yz=xz=0,z=0D. x=y0,xy=0例2 、证明:对平面三角形单元形函数存在下列关系4、 如图所示二杆平面桁架,杆长为L,弹性模量为E,杆截面积为A,试求(1)整体刚度矩阵;(2)在1、2节点处引入支承条件,写出总体平衡方程。 。5、 三角形单元的面积为1,厚度为1,已知三角形单元的形态矩阵为利用单元的形态矩阵求三角形单元的刚度矩阵。1、在一平面桁架中,已知节点3处铅直方向位移为零。若用划行划列法引入支承条件,则应划去总体刚度矩阵中的( ) 第3行和第3列 第6行和
11、第6列 第3行和第6列 第6行和第3列 2、对于每个节点具有三个位移分量的杆单元,两节点局部码为1,2,总码为4和1。其单元刚度矩阵中的元素k32应放入总体刚度矩阵K的( ) 第3行第2列上 第4行第1列上第9行第6列上 第12行第11列上 3、在一平面刚架中共有9个杆单元,12个节点,则其总体刚度矩阵K是( ) 9阶方阵 12阶方阵 36阶方阵 912阶矩阵4、若把平面应力问题的弹性矩阵改为平面应变问题的弹性矩阵只需将() E换成E/(1-2) , 换成/(1-2) E换成E/(1-2) , 换成/(1-) E换成E/(1-) , 换成/(1-2) E换成E/(1-) , 换成/(1-)5、
12、刚架杆单元与平面三角形单元( ) 单元刚度矩阵阶数不同 局部坐标系的维数不同 无任何不同 节点载荷和位移分量数不同6、图示平面结构的总体刚度矩阵和竖带矩阵K*的元素总数分别是( )。400和200 400和160 484和200 484和1607、材料性质均匀的三节点三角形单元,其内部各点( ) 应力和应变均不随位置变化 应力和应变均随位置变化 应力不随位置变化,应变随位置变化 应力随位置变化,应变不随位置变化 8、描述位移与应变关系的方程称( ) 弹性方程 几何方程 平衡方程 虚功方程9、在以平面刚架中,支承节点4的水平方向位移为已知,若用置大数法引入支承条件,则应将总体刚度矩阵中的( )
13、第4行和第4列上的元素换为大数A 第4行和第4列上的所有元素换为大数A 第10行、第10列上的元素换为大数A 第10行、第10列上的所有元素换为大数A10、图示的四根杆组成的平面刚架结构,用杆单元进行有限元分析,单元和节点的划分如图示,则总体刚度矩阵的大小为( ) 8x8阶矩10x10阶矩阵 12x12阶矩阵 16x16阶矩阵11、 在弹性力学平面刚架问题中,已知相邻节点总码的最大差值为5,则半宽值为( ) 10 18 15 1212、图示平面应力问题的结构中,单元刚度矩阵() KI=KIII, KII=KIV, 但KIKII KI=KII, KIII=KIV, 但KIKIII KIKIIKI
14、IIKIV KI=KII=KIII=KIV 阶段测试题一、选择题1. 在优化设计压缩螺旋弹簧时,如果安装空间很紧,则此时可选弹簧的( )作为优化目标。 A、外径或长度最大 B、外径或长度最小 C、压力最大 D、压力最小2.下列无约束优化方法中不属于梯度算法的是( ) A.最速下降法 B.牛顿法 C.变尺度法 D.坐标轮换法3在下列无约束优化方法中,( )需要计算Hessian(海色)矩阵。 A、powell法 B、梯度法 C、牛顿法 D、共轭梯度法4. 利用0.618法在搜索区间a,b内确定两点a1=0.382,b1=0.618,由此可以知道区间a,b的值是( )二计算题 1、 使用K-T条件
15、判断X=-1 1T点是否为目标函数f(X)=x12+x22+4x1-4x2+10,受约束于 g1(X)=x1-x2+20 g2(X)=-x12-x22-2x1+2x20时的最优点。2用阻尼牛顿法求目标函数F(x)=x21+4x22的极小点,已知初始点X(0)=2,2T,给定=0.01。(10分)3. 设某无约束优化问题的目标函数为 f(x)= x 1 2 +9x 2 2 ,已知初始迭代点 X 0 =2,2 T ,第 1 次迭代所取的方向 S 0 =-4,-36 T ,步长 0 =0.05616 ,第 2 次迭代所取的方向 S 1 =-3.55069,-0.39451 T ,步长 1 =0.45
16、556 ,试计算: (1) 第1次和第2次迭代计算所获得的迭代点X 1和X 2;(2) 在点X 0、X 1、X 2处的目标函数值 f 0、f 1、f 2;(3) 用梯度准则判别完成了第2次迭代后能否终止迭代,精度要求 =0.01。5.求函数F(X)=(x1-x2)2+(x2-x3)2+f(x3x1)2的Hessian矩阵,并判别其性质。6、 从直径D=100mm的圆木中锯出矩形梁,选择矩形梁的矩形截面的长为x1,高为x2,以使其抗弯强度为最大,试建立其优化数学模型。(截面系数】1、对于约束优化问题(1)试用外点罚函数法求其最优解; (2)写出内点罚函数法求解约束优化问题的惩罚函数。2、用内点罚
17、函数法求解:问随着rk的改变惩罚函数的最小值X*( rk )是沿着怎样一条轨迹趋向于f(X)的约束最优点,写出该轨迹的表达式。3、对于约束优化问题用复合形法求解,已知初始复合形的顶点,求迭代一次后的复合形顶点。4、一长方形薄板如图所示。其两端受均匀拉伸P, 。板长12cm,宽4cm,厚1cm。 。使用有限元法求解板的内应力,并和精确解比较。已知: 1、在一平面桁架中,已知节点3处铅直方向位移为零。若用划行划列法引入支承条件,则应划去总体刚度矩阵中的( ) 第3行和第3列 第6行和第6列 第3行和第6列 第6行和第3列 2、对于每个节点具有三个位移分量的杆单元,两节点局部码为1,2,总码为4和1
18、。其单元刚度矩阵中的元素k32应放入总体刚度矩阵K的( ) 第3行第2列上 第4行第1列上第9行第6列上 第12行第11列上 3、在一平面刚架中共有9个杆单元,12个节点,则其总体刚度矩阵K是( ) 9阶方阵 12阶方阵 36阶方阵 912阶矩阵4、若把平面应力问题的弹性矩阵改为平面应变问题的弹性矩阵只需将() E换成E/(1-2) , 换成/(1-2) E换成E/(1-2) , 换成/(1-) E换成E/(1-) , 换成/(1-2) E换成E/(1-) , 换成/(1-)5、描述位移与应变关系的方程称( ) 弹性方程 几何方程 平衡方程 虚功方程6、在以平面刚架中,支承节点4的水平方向位移
19、为已知,若用置大数法引入支承条件,则应将总体刚度矩阵中的( ) 第4行和第4列上的元素换为大数A 第4行和第4列上的所有元素换为大数A 第10行、第10列上的元素换为大数A 第10行、第10列上的所有元素换为大数A7、图示的四根杆组成的平面刚架结构,用杆单元进行有限元分析,单元和节点的划分如图示,则总体刚度矩阵的大小为( ) 8x8阶矩阵 10x10阶矩阵 12x12阶矩阵 16x16阶矩阵8、 在弹性力学平面刚架问题中,已知相邻节点总码的最大差值为5,则半宽值为( ) 10 18 15 129、刚架杆单元与平面三角形单元( ) 单元刚度矩阵阶数不同 局部坐标系的维数不同 无任何不同 节点载荷
20、和位移分量数不同0、 对一根只受轴向载荷 的杆单元,K12为负号的物理意义可理解为( ) 当节点2沿轴向产生位移时,在节点1引起的载荷与其方向相反 当节点2沿轴向产生位移时,在节点1引起的载荷与其方向相同 当节点2沿轴向产生位移时,节点1向反向产生位移 当节点2沿轴向产生位移时,节点1向同向产生位移11刚架杆单元与平面三角形单元 A 单元刚度矩阵阶数不同 B 局部坐标系的维数不同 C 无任何不同 D 节点载荷和位移分量数不同12. 单元的位移模式指的是( )。 A.近似地描述单元内任一点的位移 B.精确地描述单元内任一点的位移 C.近似地描述弹性体内任一点的位移 D.精确地描述弹性体内任一点的位移13、 如图所示由两个等截面杆件(1)与(2)所组成的结构。试求(1)、写出三个节点1,2,3的节点轴向力F1、F2、F3与节点轴向位移u1、u2、u3之间的整体刚度矩阵K。(可直接利用局部坐标系下杆单元刚度矩阵)。(2)、在节点3处施加固定约束,在节点1处施加沿轴向向右的载荷P,求各节点轴向位移。 专心-专注-专业
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
