 简单机械和功知识点大全
简单机械和功知识点大全

《简单机械和功知识点大全》由会员分享,可在线阅读,更多相关《简单机械和功知识点大全(11页珍藏版)》请在装配图网上搜索。
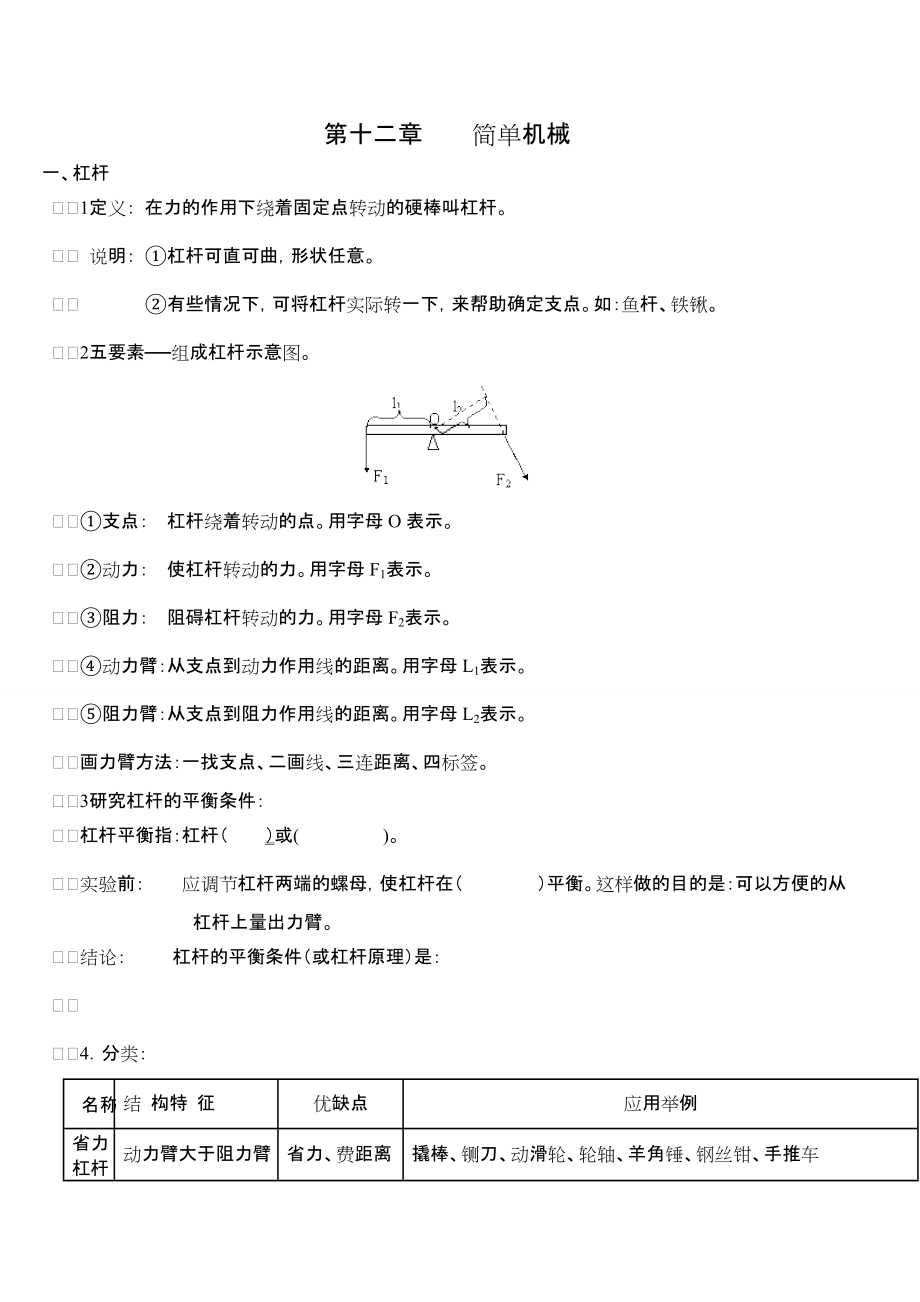
1、第十二章 简单机械一、杠杆 1定义: 在力的作用下绕着固定点转动的硬棒叫杠杆。 说明: 杠杆可直可曲,形状任意。 有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2五要素组成杠杆示意图。 支点: 杠杆绕着转动的点。用字母O表示。 动力: 使杠杆转动的力。用字母F1表示。 阻力: 阻碍杠杆转动的力。用字母F2表示。 动力臂:从支点到动力作用线的距离。用字母L1表示。 阻力臂:从支点到阻力作用线的距离。用字母L2表示。 画力臂方法:一找支点、二画线、三连距离、四标签。 3研究杠杆的平衡条件: 杠杆平衡指:杠杆(静止)或(匀速转动 )。 实验前: 应调节杠杆两端的螺母,使杠杆在(水
2、平位置)平衡。这样做的目的是:可以方便的从杠杆上量出力臂。 结论: 杠杆的平衡条件(或杠杆原理)是: 动力动力臂阻力阻力臂。写成公式F1L1=F2L2也可写成:F1/F2=L2/L1。 4分类: 名称结 构特 征优缺点应用举例省力杠杆动力臂大于阻力臂省力、费距离撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车费力杠杆动力臂小于阻力臂费力、省距离缝纫机踏板、起重臂、人的前臂、理发剪刀、钓鱼杆等臂杠杆动力臂等于阻力臂不省力不费力天平,定滑轮 达标检测:1、在“探究杠杆平衡条件”的实验前,(1)将杠杆放在水平面上后,发现右端比左端低,这时,应将右端螺母向_边调;实验中是靠移动 来改变力臂的,靠增减
3、来改变阻力和动力的大小的。2、如图3所示,OB为一轻质杠杆,O为支点,OA=0.3m,OB=0.4m,将重30N的物体悬挂在B点,当杠杆在水平位置平衡时,在A点至少需加 _ N的拉力,这是一个 _ (选填“省力”或“费力”)杠杆图33、下列工具中:(1)镊子;(2)羊角锤;(3)铡刀;(4)理发剪刀;(5)裁衣剪刀;(6)天平;(7)大扫帚;(8)筷子;(9)剪铁皮的剪刀;(10)道钉撬;(11)火钳;(12)起重机的起重臂;(13)撬棒;(14)汽车的脚踏板其中属于省力杠杆的是_ _,属于等臂杠杆的是_,属于费力杠杆的是_ _(填序号)二、滑轮 1定滑轮: 定义:中间的轴固定不动的滑轮。 实
4、质:等臂杠杆。 特点:使用定滑轮不能省力但是能改变动力的方向。 对理想的定滑轮(不计轮轴间摩擦)F=G。 绳子自由端移动距离SF(或速度vF)=重物移动的距离SG(或速度vG) 2动滑轮: 定义:和重物一起移动的滑轮。(可上下移动,也可左右移动) 实质:动滑轮的实质是:动力臂为阻力臂2倍的省力杠杆。 特点:使用动滑轮能省一半的力,但不能改变动力的方向。 理想的动滑轮(不计轴间摩擦和动滑轮重力)则:F=G只忽略轮轴间的摩擦则,拉力F=(G物+G动)绳子自由端移动距离SF(或vF)=2倍的重物移动的距离SG(或vG) 3滑轮组 定义:定滑轮、动滑轮组合成滑轮组。 特点:使用滑轮组既能省力又能改变动
5、力的方向。 理想的滑轮组(不计轮轴间的摩擦和动滑轮的重力)拉力F=G。只忽略轮轴间的摩擦,则拉力F=(G物+G动)。绳子自由端移动距离SF(或vF)=n倍的重物移动的距离SG(或vG)。 组装滑轮组方法:根据“奇动偶定”的原则。结合题目的具体要求组装滑轮。达标检测:1、用定滑轮匀速提起重物的三种拉法,所用的拉力分别以F1、F2、F3表示,( )A.拉力F1最小 B.拉力F2最小 C.拉力F3最小 D.三种拉力一样2、如图所示,滑轮组承担重物的绳子股数为 股。若绳子自由端在拉力F作用下,竖直向上移动0.2m,则重物G上升距离为 m;若物体重为100N,不计滑轮重,则匀速向上的拉力F为 N;若四个
6、滑轮重量各是2N,则拉力F又为 N(摩擦不计)。3、如图5,小森用同样的力把甲、乙两物体匀速提升,不计摩檫和滑轮重,则重力G甲G乙GF图54、在滑轮组提升物体,当绳子自由端被拉下2m时,物体升高了0.5m,被提升物的质量是20kg。若不计动滑轮重力和摩擦阻力,绳子的力应为A40N B50N C100N D5N 三、机械效率: 、有用功:定义: 对人们有用的功。 公式: W有用Gh(提升重物)=W总W额=W总 斜面: W有用= Gh 2、额外功:定义: 并非我们需要但又不得不做的功 公式: W额= W总W有用=G动h(忽略轮轴摩擦的动滑轮、滑轮组) 斜面: W额=f L 3、总功: 定义: 有用
7、功加额外功或动力所做的功 公式: W总=W有用W额=FS= W有用 斜面: W总= fL+Gh=FL 4、机械效率: 定义:有用功跟总功的比值。W有用W总 =GhFL=GhFS=GhFh=GF=GhFS=GhF2h=G2F=GhFS=GhFnh=GnF= 公式: 斜 面: 定滑轮: 动滑轮: 滑轮组 有用功总小于总功,所以机械效率总小于1 。通常用 百分数 表示。某滑轮 机械效率为60%表示有用功占总功的60% 。 提高机械效率的方法:减小机械自重、减小机件间的摩擦。W有用W总 =GhFS= 5、机械效率的测量: 原 理: 应测物理量:钩码重力G、钩码提升的高度h、拉力F、绳的自由端移动的距离
8、S 器 材:除钩码、铁架台、滑轮、细线外还需 刻度尺、弹簧测力计。 步骤:必须匀速拉动弹簧测力计使钩码升高,目的:保证测力计示数大小不变。 结论:影响滑轮组机械效率高低的主要因素有: A动滑轮越重,个数越多则额外功相对就多。 B提升重物越重,做的有用功相对就多。 C 摩擦,若各种摩擦越大做的额外功就多。 绕线方法和重物提升高度不影响滑轮机械效率。 达标检测:1关于机械效率的说法中正确的是( )A越省力的机械,效率越高B做有用功越多的机械,效率越高C做相同的功,额外功的值越小,则机械效率一定越高D做功越快的机械,机械效率越高2.下列关于机械效率的说法错误()A、当总功一定时,有用功越多或额外功越
9、少,机械效率越高。B、当有用功一定时,总功越少或额外功越少,机械效率越高。C、当额外功一定时,总功越多或有用功越多,机械效率越高。D、使用机械时,越省力、功率越大,则机械效率大3、滑轮组将重500N的物体,举高60cm的过程中,机械效率为80,则有用功为 J,额外功为 J。4、某人将一物体用F=40N的推力匀速将一个重200 N的物体推上高h=1 m、长s=6 m的斜面,则此人对物体做的总功为_ _J,额外功为_J,斜面的机械效率_,斜面和物体间的摩擦力是_N.能力提升1用剪刀剪东西时,如果用剪刀的尖部去剪就不易剪断,而改用剪刀中部去剪就容易些,这是因为( )A增大了动力 B减小了阻力C减小了
10、阻力臂 D增大了动力臂2、测某机器的机械效率时,有如下4个记录结果,其中肯定错误的是( )。A. 99B. 120C. 60D. 803、关于机械效率的下列说法中,正确的是( ) A.利用机械越省力,机械效率越高B.机械做功越快,机械效率越高C.有用功相同,总功越大的机械效率越高4在如图所示的各种情况中,用同样大小的力将重物匀速提升,若不计摩擦和滑轮重,物重最大的是( )5杠杆的平衡条件是_,如果杠杆的动力臂是阻力臂的5倍,当杠杆平衡时,动力是阻力的_ 倍6重200 N的物体,使用定滑轮将它提起时,不计摩擦和滑轮重,所用拉力是_N,如果使用动滑轮将它提起,所用拉力是_ N7如右图所示,物体重G
11、=500N,当物体G匀速上升时,则挂钩B承受拉力为_N,若绳子自由端向上拉动2m,则物体向上移动_m。(不计摩擦、不计滑轮重)8如图所示,在水平拉力F的作用下重100 N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10 N,则拉力F的大小为 N,物体A与水平桌面的摩擦力大小为 N。9.作图题(1)画出下列图中的动力臂L1和阻力臂L2。 (2)按下图中所给的省力条件,画出各滑轮组绳子穿绕方法。图中G表示物重,G表示动滑轮重,F表示人对绳子的拉力。10、如下图所示,建筑工人用滑轮组提升重为220N的泥桶,动滑轮重为20N,不计滑轮与轴之间的摩擦及绳重。如果工人将绳子匀速向上拉了6m,则泥桶上升了多少?滑轮组的机械效率是多少?11利用如图4所示的装置,用40牛的拉力使物体匀速上升,不计绳重和摩擦,整个装置的机械效率为75%求:(1)物体和动滑轮的重各是多少? 图4 (2)若绳能承受的最大拉力为50牛,此装置的机械效率最大可提高到多少? (注:文档可能无法思考全面,请浏览后下载,供参考。可复制、编制,期待你的好评与关注!)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
